

Курсовая работа3 / 2008-05-23-00-37-Anne-1
.doc
Кафедра АПУ
Дисциплина: Основы теорий управления
ОТЧЕТ ПО КУРСОВОЙ РАБОТЕ
“Синтез систем управления по заданным показателям качества”
Студент: Градобойнов А Б
Козлов М И
Факультет КТИ
Группа № 5352
Преподаватель Новожилов И.М.
Санкт-Петербург
2008
С
ОУ P
Kp
W0(s)
Xy(t)
y(t)



![]()
![]()


![]()

|
|
Значение
параметров
|
Заданные показатели качества |
|||
|
|
|
|
|
||
|
|
T1=0.5 сек. T2=0.01 сек. |
X y=5t |
|
|
|
1. Исходя из заданной величины
установившейся ошибки
![]() y
определить требуемый коэффициент
передачи регулятора Kp
y
определить требуемый коэффициент
передачи регулятора Kp
В данной системе функция по возмущению Wf(s)=0 Следовательно будем рассматривать только ошибку по управлению.
Установившаяся ошибка:
![]()
Передаточная функция замкнутой системы по управлению:
![]() где Wp(s)=Kp*
Wo (s)
где Wp(s)=Kp*
Wo (s)
Xy(t)=5t;
Изображение по Лапласу Xy(s)=![]() ;
;

2. Ввести полученную
передаточную функцию Wp(s)=Kp*
Wo
(s) и
определить устойчивость и показатели
качества tp,
![]() ,
,![]() y.
y.
Wp(s)=Kp*
Wo
(s) =
![]() =
=
![]() ;
;
Передаточная функция замкнутой системы по управлению:
![]()
Воспользуемся критерием Найквиста для разомкнутой системы:
Корневая плоскость:
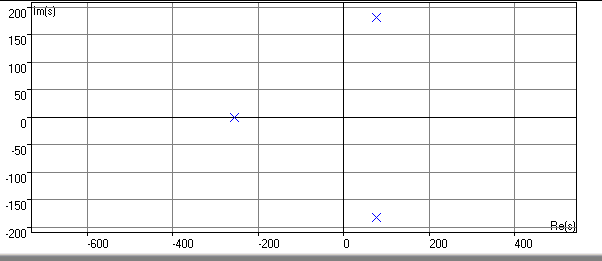
Нули:
Корни отсутствуют - полином нулевой степени
Полюсы:
p1 = 76.500611 +182.655837j
p2 = 76.500611 -182.655837j
p3 = -255.001222
Процесс расходящийся, т.к. ХУ имеет корни в правой полуплоскости.
Система не будет устойчива.
Время регулирования бесконечно велико
![]()
Перерегулирование бесконечно велико
![]()
Статический режим отсутствует, следовательно установившаяся ошибка сигнала бесконечность.
Показатели качества:
Разомкнутая система:

Частота среза: 208.1084
Запасы по фазе, по модулю отcутствуют.
3. Осуществить ручной синтез желаемой
передаточной функций
![]() в следующем порядке:
в следующем порядке:
3.1 По заданному времени регулирование
![]() определить начальную частоту
среза системы
определить начальную частоту
среза системы
![]() и задать асимптоту
и задать асимптоту
![]() с наклоном -20 дБ/дек
с наклоном -20 дБ/дек
Определим начальную частоту среза:
Пусть время регулирования 5 секунд.
![]() 100(1/с)
100(1/с)
3.2 Задать запасы по амплитуде
![]() L1
и
L1
и
![]() L2
порядка (20
L2
порядка (20![]() 25)
дБ.
25)
дБ.
Через точку 100(1/с) проведём асимптоту с наклоном -20дБ/дек
Выбираем
![]() дБ,
дБ,
![]()
Выбираем схему стыковки с типовым наклоном -60 дБ/дек:
3.3 Осуществить стыковку с характеристикой
Lр(![]() )
асимптотами с типовыми наклонами -20,
-40 или -60 дБ/дек.
)
асимптотами с типовыми наклонами -20,
-40 или -60 дБ/дек.

3.4. Восстановить передаточную функцию желаемой системы Wж(S).
![]()
Рассмотрим интегральное звено:
![]()
Рассмотрим апериодическое звено:
T1=1,66; T3=0,003;
3.5 Ввести в ПЭВМ и рассчитать показатели
качества:
![]() ,
,
![]() ,
,
![]() .
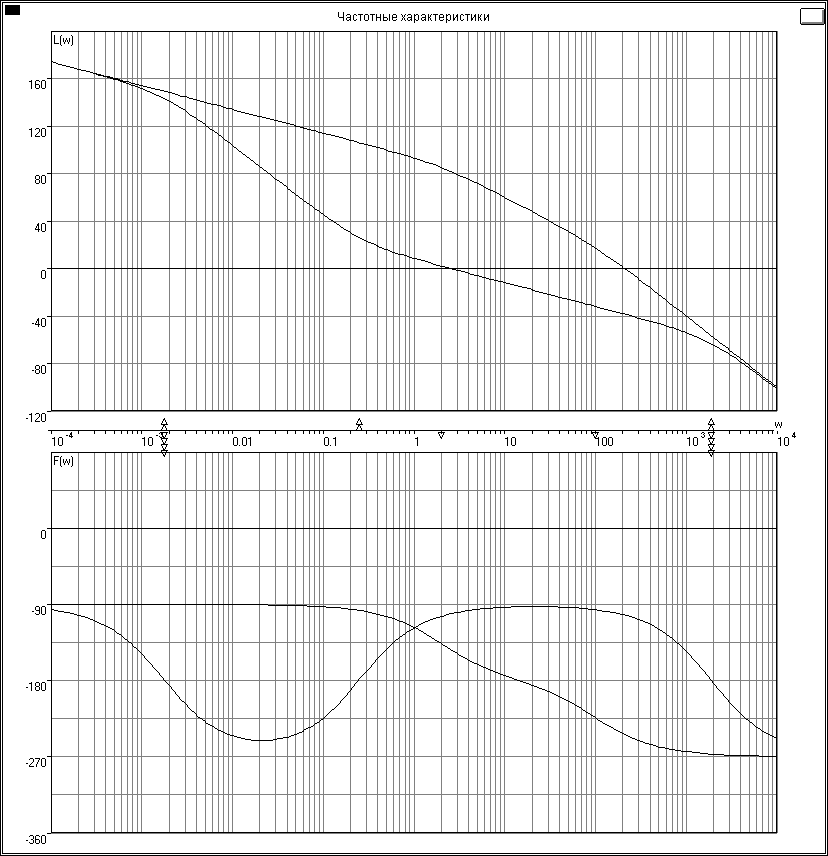
Привести положение корней, ЛЧХ,
вид переходного процесса.
.
Привести положение корней, ЛЧХ,
вид переходного процесса.
Корни:
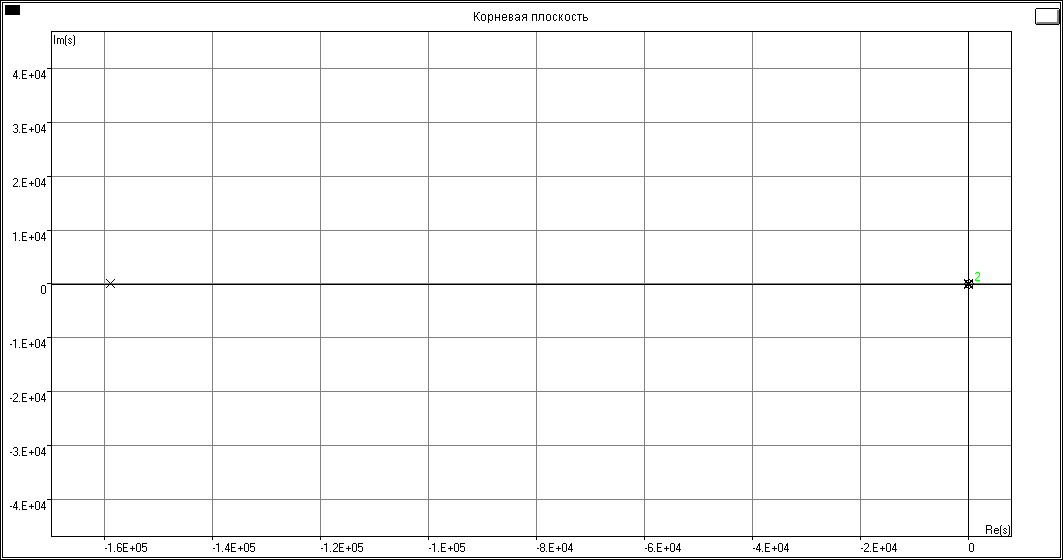
Нули:
z1 = -0.250000
z2 = -0.250000
Полюсы:
p1 = 0.000000
p2 = -0.001767 +0.000104j
p3 = -0.001767 -0.000104j
p4 = -25.089155
p5 = -159022.907311
ЛЧХ:

Частота среза: 2.5393
Частота среза: 2.5185
Запас по фазе: 73.0093
Частота пи: 1977.5714
Запас по модулю: 95.8759
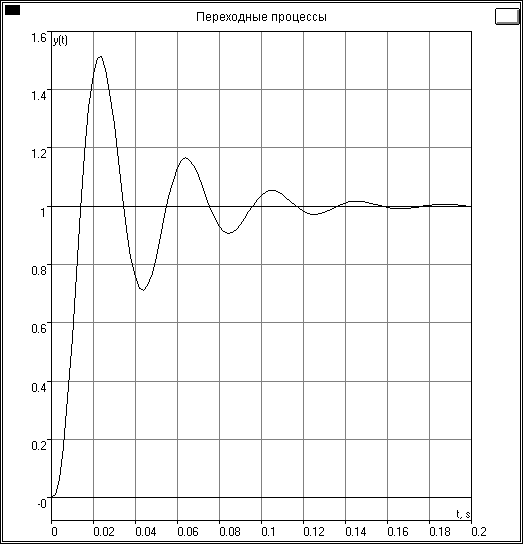
Переходный процесс(h(t),замкнутая система):

Установившееся значение: 1.0103
Время регулирования: 6.203 с
Перерегулирование: 13.79%
Система удовлетворяет требованиям.
3.6. Изменяя положение частоты среза и
запасы
![]() L1
,
L1
,
![]() L2
провести итерационную процедуру
минимизации времени переходного
процесса.
L2
провести итерационную процедуру
минимизации времени переходного
процесса.
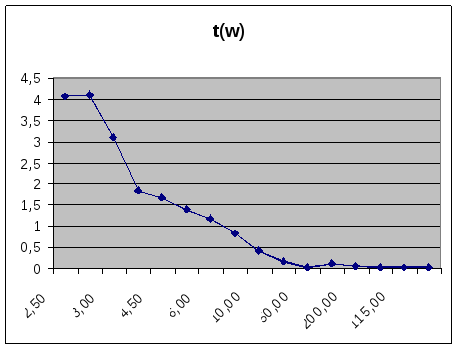
Привести графики зависимости: tp=
f(![]() с)
и
с)
и
![]() =
f(
=
f(![]() L2).
L2).
Для максимизации
![]() L2,
ЛЧХ желаемой системы следует соединить
с ЛЧХ реальной системы – таким образом,
ликвидируется один перелом:
L2,
ЛЧХ желаемой системы следует соединить
с ЛЧХ реальной системы – таким образом,
ликвидируется один перелом:
1)
![]() с
= 2.5,
с
= 2.5,![]() L1
= 20
L1
= 20
![]() L2
: 57.61 дБ
L2
: 57.61 дБ
Установившееся значение: 1.0000
Время регулирования: 4.0898 с
Перерегулирование: 13.25%
Система удовлетворяет требованиям
2)
![]() с
= 2.6 рад/с,
с
= 2.6 рад/с,![]() L1
= 21 дБ
L1
= 21 дБ
![]() L2
: 57.099 дБ
L2
: 57.099 дБ
Время регулирования: 4.0971 с
Перерегулирование: 11.96%
4)
![]() с
= 3 рад/с,
с
= 3 рад/с,![]() L1
= 18 дБ
L1
= 18 дБ
![]() L2
: 55.235 дБ
L2
: 55.235 дБ
Время регулирования: 3.0927 с
Перерегулирование: 15.78%
5)
![]() с
= 3.14 рад/с,
с
= 3.14 рад/с,![]() L1
= 16 дБ
L1
= 16 дБ
![]() L2
: 54.599 дБ
L2
: 54.599 дБ
Время регулирования: 2,6424 с
Перерегулирование: 18.71%
6)
![]() с
= 4.5 рад/с,
с
= 4.5 рад/с,![]() L1
= 16 дБ
L1
= 16 дБ
![]() L2
: 49.952 дБ
L2
: 49.952 дБ
Время регулирования: 1.8418 с
Перерегулирование: 18.70%
7)
![]() с
= 5 рад/с ,
с
= 5 рад/с ,![]() L1
= 16 дБ
L1
= 16 дБ
![]() L2
: 48.58 дБ
L2
: 48.58 дБ
Время регулирования: 1,6714 с
Перерегулирование: 18.71%
8)
![]() с
= 6 рад/с ,
с
= 6 рад/с ,![]() L1
= 16 дБ
L1
= 16 дБ
![]() L2
: 46.2 дБ
L2
: 46.2 дБ
Время регулирования: 1.393 с
Перерегулирование: 18.72%
9)
![]() с
= 7 рад/с ,
с
= 7 рад/с ,![]() L1
= 16 дБ
L1
= 16 дБ
![]() L2
: 44.196 дБ
L2
: 44.196 дБ
Время регулирования: 1.1864 с
Перерегулирование: 18.73 %
10)
![]() с
= 10 рад/с ,
с
= 10 рад/с ,![]() L1
= 16 дБ
L1
= 16 дБ
![]() L2
: 39.549 дБ
L2
: 39.549 дБ
Время регулирования: 0.8296 с
Перерегулирование: 18.79 %
11)
![]() с
= 20 рад/с ,
с
= 20 рад/с ,![]() L1
= 16 дБ
L1
= 16 дБ
![]() L2
: 30.518 дБ
L2
: 30.518 дБ
Время регулирования: 0.4129 с
Перерегулирование: 19.17%
12)
![]() с
= 50 рад/с ,
с
= 50 рад/с ,![]() L1
= 16 дБ
L1
= 16 дБ
![]() L2
: 18.58 дБ
L2
: 18.58 дБ
Время регулирования: 0.1571 с
Перерегулирование: 22.20% > 20% - не удовлетворяет требованиям
13)
![]() с
= 100 рад/с ,
с
= 100 рад/с ,![]() L1
= 50 дБ
L1
= 50 дБ
![]() L2
: 9.549 дБ
L2
: 9.549 дБ
Время регулирования: 0.0403 с
Перерегулирование: 12.36%
14)
![]() с
= 200 рад/с ,
с
= 200 рад/с ,![]() L1
= 100 дБ
L1
= 100 дБ
![]() L2
: 0.518 дБ
L2
: 0.518 дБ
Время регулирования: 0.1071 с
Перерегулирование: 51.53 % > 20% - не удовлетворяет требованиям
Вид процесса для таких параметров:
15)
![]() с
= 150 рад/с ,
с
= 150 рад/с ,![]() L1
= 100 дБ
L1
= 100 дБ
![]() L2
: 4.266 дБ
L2
: 4.266 дБ
Время регулирования: 0.0550 с
Перерегулирование: 34.02% > 20% - не удовлетворяет требованиям
16)
![]() с
= 125 рад/с ,
с
= 125 рад/с ,![]() L1
= 100 дБ
L1
= 100 дБ
![]() L2
: 6.641 дБ
L2
: 6.641 дБ
Время регулирования: 0.0525 с
Перерегулирование: 22.46 % > 20% - не удовлетворяет требованиям
17)
![]() с
= 115 рад/с ,
с
= 115 рад/с ,![]() L1
= 500 дБ
L1
= 500 дБ
![]() L2
: 7.728 дБ
L2
: 7.728 дБ
Время регулирования: 0.0386 с
Перерегулирование: 18.17 %
18)
![]() с
= 117 рад/с ,
с
= 117 рад/с ,![]() L1
= 50 дБ
L1
= 50 дБ
![]() L2
: 7.503дБ
L2
: 7.503дБ
Время регулирования: 0.0390 с
Перерегулирование: 19.93%
На шаге 18, получено минимальное время
регулирования. Как видно, дальнейшее
увеличение частоты среза делает систему
неустойчивой. Изменение запаса по
амплитуде
![]() L1
не изменяет время регулирования.
L1
не изменяет время регулирования.
Таким образом, время регулирования минимизировано.
Построим графики зависимостей:
tp=
f(![]() с)
с)
![]() =
f(
=
f(![]() L2).
L2).
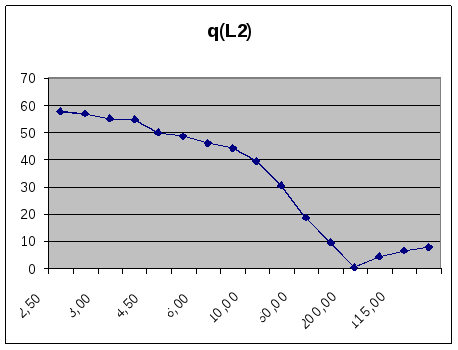
Примечание: в некоторых экспериментах оба параметра менялись одновременно, этим обусловлена не монотонность графиков. Однако общий характер зависимости понятен.
4. Для полученного
![]() записать
записать
![]() и рассчитать последовательную коррекцию
и рассчитать последовательную коррекцию
![]() в регулятор и провести проверочный
расчет показателей качества.
в регулятор и провести проверочный
расчет показателей качества.
Таким образом, из п.3.6 можно сделать
вывод, что минимальное время регулирования
желаемой системы
![]() с,
достигается при
с,
достигается при
![]()
Запишем
![]() при T2=2,7;
T1=941;
T3=0,003
при T2=2,7;
T1=941;
T3=0,003
![]()
Последовательная коррекция имеет вид:
![]()
Переходный процесс
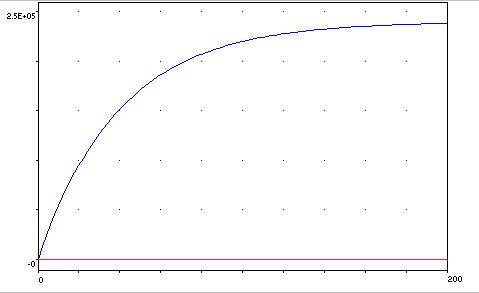
Установившееся значение: 240000.0000
Время регулирования: 121.2135 с
Перерегулирование: 0.00%
5. Дать вывод по работе
В курсовой работе был проведён синтез системы управления, включающий этапы анализа имеющейся системы, синтеза желаемой системы и этап коррекции.
В качестве метода коррекции была
использована последовательная коррекция,
позволяющая легко находить передаточную
функцию регулятора, но имеющая высокую
чувствительность к параметрическим
возмущениям. В качестве оптимального
был выбран вариант системы с наименьшим
временем регулирования, достигающимся
при
![]() ,
при этом перерегулирование удовлетворяет
заданному ограничению в 20%.
,
при этом перерегулирование удовлетворяет
заданному ограничению в 20%.