

Параметры обработки (Process)
На вкладке GPS+ PostProcess (рис. 9) можно установить маску по углу возвышения, спутниковую систему (GPS+, этот режим позволяет использовать систему ГЛОНАС и GPS, только GPS), минимальную продолжительность измерений (фиксированный отрезок времени, или автоматически) и вкл/выкл. Непрерывную кинематику.
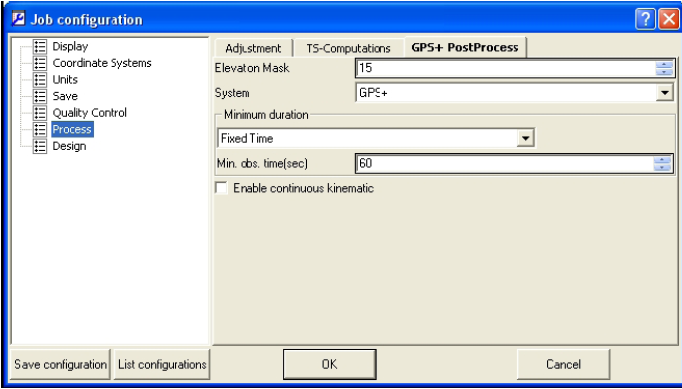
Рис. 9
Импорт данных из приёмника.
1-ый способ.
Соедините приёмник с компьютером с помощью RS232 или USB кабеля. Если используете USB кабель, то не забудьте установить USB драйвер приёмника, находящийся на диске GPS+ software (папка TPS USB Driver) и включите приёмник. Запустите Topcon Tools и откройте рабочий файл.
В панели управления Windows выберите Мой компьютер: Пуск -> Мой компьютер:
В разделе Другие найдите значок Topcon Receivers (рис. 10) и щёлкните по нему два раза, далее щёлкаем два раза по появившемуся значку Hiper (рис. 11) и открываем окно с файлами, записанными в приёмнике:
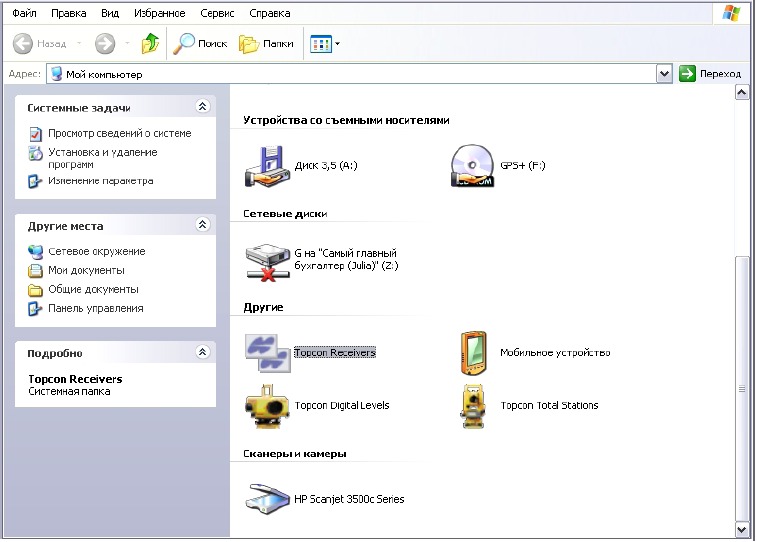
Рис10
Далее подхватываем мышью файл (нажав на него мышью) и неотпуская перетаскиваем в рабочее окно Topcon Tools.
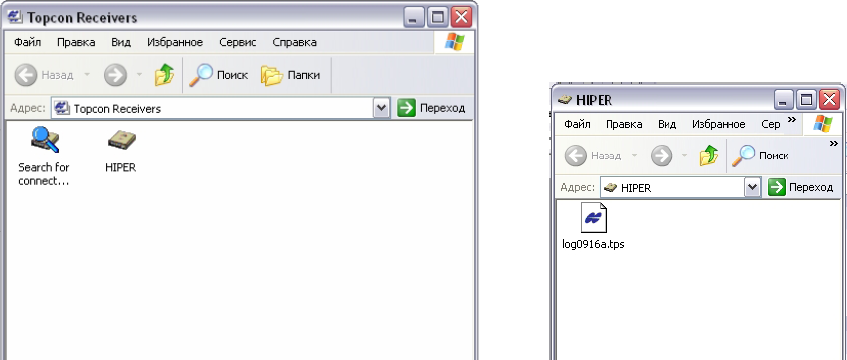
Рис. 11
2-ой метод.
Соедините приёмник с компьютером с помощью RS232 или USB кабеля. Если используете USB кабель, то не забудте установить USB драйвер приёмника, находящийся на диске GPS+ software (папка TPS USB Driver) и включите приёмник.
Запустите Topcon Tools и откройте рабочий файл. Затем в меню выберите Job -> Import from Device (рис. 12).
Выберите мышью Topcon Receivers в диалоге Import from Device. Программа найдёт приемник, подсоединённый к порту. Щёлкнув правой клавишей мыши в диалоге по приёмнику и выбрав пункт Properties можно ознакомиться с информацией о приёмнике.
Для импорта файлов из приёмника выделите нужные файлы и щёлкните по кнопке Open.

Рис. 12
Активизация кинематики.
По умолчанию отображение и обработка кинематических данных отключена. Для того чтобы зключить выберите в меню Proccess -> Process Properties (рис. 13) и в диалоговом окне Process Properties и активизируйте флажок Enable continuous kinematic (Активизировать непрерывную кинематику).
Если в рабочем файле содержатся кинематические данные, то следующие данные отображаются в Topcon Tools:
- Кинематические точки в рабочем окне Схема (Map view) и на вкладке Points таблицы.
- Кинематические измерения на вкладке GPS Obs.
- Кинематические траектории в рабочем окне Схема (Map view).
Для каждой эпохи в кинематическом сеансе, который может быть обработан программа, генерирует кинематическую точку, а также создаёт уникальное название на основании названия сеанса и эпохи GPS времени.
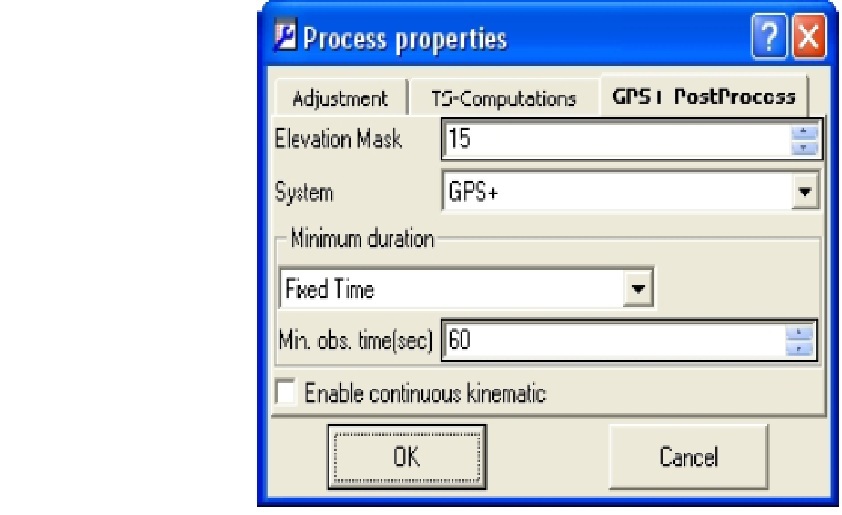
Рис. 13
Обработка.
Обработка вектора происходит в соответствии с параметрами, введёнными в диалогах настройки и допусков на ошибки измерений.
Для обработки всех измерений:
- Выберите команду в меню Process -> GPS+PostProcessing.
- Нажмите кнопку F7
- Нажмите кнопку GPS+PostProcessing в панели инструментов
Для обработки избранных измерений выберите их каким либо способом и нажмите что либо из вышеперечисленного.
В окне Legend (Легенда) показаны и описаны обозначения и цвет каждого обработанного элемента.
В окне Мар (Схема) обработанные вектора отображаются зелёными линиями.
В Таблице обработанная информация отображается в следующих столбцах (рис. 14):
Р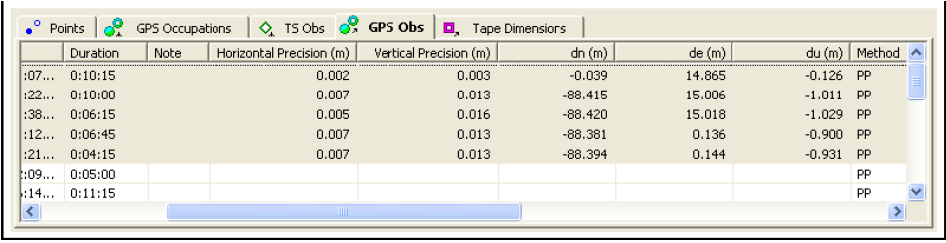 ис.
14
ис.
14
Точность векторов в плане (Horizontal Precision) и по высоте (Vertical Precision).
- Приращения координат вектора по оси ординат (dn), абсцисс (de) и высоте (du).
Тип решения векторов, либо фиксированное (разрешены все неоднозначности фазы несущей - получены целочисленные значения циклов), либо плавающее (все неоднозначности имеют дробное значение, не целое).