

2.4.По методу доступа
Типичная среда передачи данных в ЛВС - отрезок (сегмент) коаксиального кабеля. К нему через аппаратуру окончания канала данных подключаются узлы - компьютеры и возможно общее периферийное оборудование. Поскольку среда передачи данных общая, а запросы на сетевые обмены у узлов появляются асинхронно, то возникает проблема разделения общей среды между многими узлами, другими словами, проблема обеспечения доступа к сети.
Доступом к сети называют взаимодействие станции (узла сети) со средой передачи данных для обмена информацией с другими станциями. Управление доступом к среде - это установление последовательности, в которой станции получают доступ к среде передачи данных.
Различают случайные и детерминированные методы доступа. Среди случайных методов наиболее известен метод множественного доступа с контролем несущей и обнаружением конфликтов. Англоязычное название метода - Carrier Sense Multiple Access /Collision Detection (CSMA/CD).
Протокол csma/cd
Протокол CSMA/CD воплотил в себе идеи вышеперечисленных алгоритмов и добавил важный элемент – разрешение коллизий. Поскольку коллизия разрушает все передаваемые в момент ее возникновения кадры, то и нет смысла станциям продолжать дальнейшую передачу своих кадров, коль скоро они (станции) обнаружили коллизии. В противном случае, значительной была бы потеря времени при передаче длинных кадров. Поэтому для своевременного обнаружения коллизии станция прослушивает среду на всем протяжении собственной передачи.
Основные правила алгоритма CSMA/CD для передающей станции.
Передача кадра:
Станция, собирающаяся передавать, прослушивает среду, и передает, если среда свободна. В противном случае (т.е. если среда занята), переходит к шагу 2. При передаче нескольких кадров подряд станция выдерживает определённую паузу между посылками кадров – межкадровый интервал, причем после каждой такой паузы перед отправкой следующего кадра станция вновь прослушивает среду (возвращение на начало шага 1);
Если среда занята, станция продолжает прослушивать среду до тех пор, пока среда не станет свободной, и затем сразу же начинает передачу;
Каждая станция, ведущая передачу, прослушивает среду, и, в случае обнаружения коллизии не прекращает сразу же передачу, а сначала передает короткий специальный сигнал коллизии – jam-сигнал, информируя другие станции о коллизии, и прекращает передачу;
После передачи jam-сигнала станция замолкает и ждет некоторое произвольное время в соответствии с правилом бинарной экспоненциальной задержки, а затем возвращается к шагу 1.
Межкадровый интервал IFG (interframe gap) составляет 9,6 мкс, (12 байт). С одной стороны, он необходим для того, чтобы принимающая станция могла корректно завершить прием кадра. Кроме этого, если бы станция передавала кадры непрерывно, она бы полностью захватила канал и, тем самым, лишила другие станции возможности передачи.
Jam-сигнал (jamming – дословно глушение). Передача jam-сигнала гарантирует, что ни один кадр не будет потерян, так как все узлы, которые передавали кадры до возникновения коллизии, приняв jam-сигнал, прервут свои передачи и замолкнут в ожидании новой попытки передать кадры. Jam-сигнал должен быть достаточной длины, чтобы он дошел до самых удаленных станций коллизионного домена с учетом дополнительной задержки SF (safety margin) на возможных повторителях.
Коллизионный домен (collision domain) – множество всех станций в сети, одновременная передача любой пары из которых приводит к коллизии.
На рис. 1.2. проиллюстрирован процесс обнаружения коллизии применительно к топологии ''шина''.
В момент времени t0 узел А начинает передачу, естественно прослушивая свой же передаваемый сигнал. В момент времени t1, когда кадр почти дошел до узла B, этот узел, не зная о том, что уже идёт передача, сам начинает передавать. В момент времени t2=t1+, узел В обнаруживает коллизию (увеличивается постоянная составляющая электрического сигнала в прослушиваемой линии). После этого узел В передаёт jam-сигнал и прекращает передачу. В момент времени t3 сигнал коллизии доходит до узла А, после чего А также передаёт jam-сигнал и прекращает передачу.
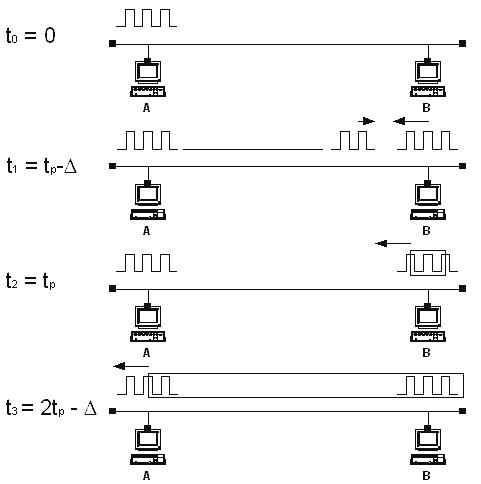
Рис. 1.2. Обнаружение коллизии в шине при использовании схемы CSMA/CD стандарта Ethernet
По стандарту Ethernet узел не может передавать очень короткие кадры, или, иными словами, вести очень короткие передачи. Даже если поле данных заполнено не до конца, то появляется специальное дополнительное поле, удлиняющее кадр до минимальной длины 64 байта без учета преамбулы.
Время канала ST (slot time) – это минимальное время, в течение которого узел обязан вести передачу, занимать канал. Это соответствует передаче кадра минимально допустимого размера, принятого стандартом Ethernet IEEE 802.3. Время канала связано с максимально допустимым расстоянием между узлами сети – диаметром коллизионного домена.
Допустим, что в приведенном выше примере реализуется наихудший сценарий, когда станции А и В удалены друг от друга на максимальное расстояние. Время распространения сигнала от А до В обозначим через tp. Узел А начинает передавать в нулевой момент времени. Узел В начинает передавать в момент времени t1 = tp + и обнаруживает коллизию спустя интервал после начала своей передачи. Узел А обнаруживает коллизию в момент времени t3 = 2tp - . Для того, чтобы кадр, испущенный А, не был потерян, необходимо, чтобы узел А не прекращал вести передачу к этому моменту, так как тогда, обнаружив коллизию, узел А будет знать, что его кадр не дошел, и попытается передавать его повторно. В противном случае кадр будет потерян. Максимальное время, спустя которое с момента начала передачи узел А еще может обнаружить коллизию, равно 2tp – это время называется задержкой на двойном пробеге RTD (round-trip delay). В более общем случае, RTD определяет суммарную задержку, связанную как с задержкой из-за конечной длины сегментов, так и с задержкой, возникающей при обработке кадров на физическом уровне промежуточных повторителей и оконечных узлов сети. Далее удобно использовать также другую единицу измерения времени: битовое время BT (bit time). Время 1 BT соответствует времени, необходимому для передачи одного бита, т.е. 0,1 мкс при скорости 10 Мбит/с.
Стандартом Ethernet регламентированы следующие правила обнаружения коллизий конечным узлом сети:
Узел А должен обнаружить коллизию до того, как передаст свой 512-й бит, включая биты преамбулы;
Узел А должен прекратить передачу раньше, чем будет передан кадр минимальной длины – передано 576 бит (512 бит после ограничителя начала кадров SFD);
Перекрытие между передачами узлов А и В – битовый интервал, начиная с момента передачи первого бита преамбулы узлом А и заканчивая приемом узлом А последнего бита, испущенного узлом В, - должно быть меньше, чем 575 BT.
Последнее условие для сети Ethernet является наиболее важным, поскольку, его выполнение ведет к выполнению и первых двух. Это третье условие задает ограничение на диаметр сети. Применительно к задержке на двойном пробеге RTD третье условие можно сформулировать в виде: RTD < 575 BT.
При передаче больших кадров, например 1500 байт, коллизия, если она вообще возникнет, обнаруживается практически в самом начале передачи, не позднее первых 64 переданных байт (если коллизия не возникла в это время, то позже она уже не возникнет, поскольку все станции прослушивают линию и, «слыша» передачу будут молчать). Так как jam-сигнал значительно короче полного размера кадра, то при использовании алгоритма CSMA/CD количество вхолостую израсходованной емкости канала сокращается до времени, требуемого на обнаружение коллизии. Раннее обнаружение коллизий приводит к более эффективному использованию канала. Позднее обнаружение коллизий, свойственное более протяженным сетям, когда диаметр коллизионного домена составляет несколько километров, снижает эффективность работы сети.
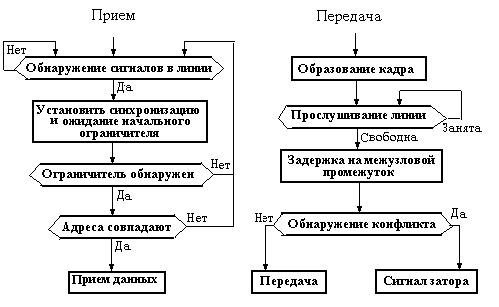
На рис. 1.3. представлены алгоритмы приема и передачи данных в одном из узлов при CSMA/CD.
Среди детерминированных методов преобладают маркерные методы доступа.
Маркерный метод - метод доступа к среде передачи данных в ЛВС, основанный на передаче полномочий передающей станции с помощью специального информационного объекта, называемого маркером. Под полномочием понимается право инициировать определенные действия, динамически предоставляемые объекту, например станции данных в информационной сети.
Применяется ряд разновидностей маркерных методов доступа. Например, в эстафетном методе передача маркера выполняется в порядке очередности;
в способе селекторного опроса (квантированной передачи) сервер опрашивает станции и передает полномочие одной из тех станций, которые готовы к передаче. В кольцевых одноранговых сетях широко применяется тактируемый маркерный доступ, при котором маркер циркулирует по кольцу и используется станциями для передачи своих данных.[10]