

5.5. Модули измерительных преобразователей
Модули измерительных преобразователей предназначены для преобразования информации, поступающей от датчиков положения механизмов ТО (геометрическая информация), в цифровой код микроЭВМ УЧПУ. Модули замыкают обратные связи по положению следящих систем приводов соответствующих координат. Наибольшее применение в УЧПУ нашли различные индукционные датчики (линейные и круговые индуктосины, вращающиеся трансформаторы, сельсины), а также фотоэлектрические (импульсные, кодовые, растровые) датчики положения. Число модулей определяется числом управляемых координат.
В общем виде в схеме МИП можно выделить две части: измерительную и интерфейсную.
В модуле фотоэлектрического импульсного преобразователя схема преобразования выполняет функции согласования уровней сигналов датчика и измерительной части. В случае если датчик имеет выходные сигналы ТТЛ или ТТЛШ уровней, данная схема может отсутствовать (рис. 5.5.1 а).

Фотоэлектрический импульсный преобразователь, например, ВЕ178 имеет три серии выходных импульсов. Вых2 отстаёт по фазе от Вых1 на 900 или опережает (рис. 5.5.1 б). Это позволяет разработать схему автоматического выбора направления счёта (САВНС), которая является неотъемлемой частью измерительных систем (ИС) технологического оборудования. ИС предназначенны для определения действительного положения механизмов при отработке управляющих программ.
Количество импульсов U вых1 и Uвых2 формируемых датчиками на один оборот определяется конкретным типом первичного преобразователя (датчик ВЕ178 выдаёт от 1000 до 3000 импульсов). Третий сигнал (сигнал оборота) выдаётся один раз на оборот подвижного диска датчика. Он может использоваться в ИС для инициации обмена в режиме прерывания программы.
На рис. 5.5.2 приведена схема МИП, подключаемого к интерфейсу МПИ и использующего программный обмен с процессором.
Принципиальное решение схемы преобразования, представленной на данном рисунке, определяется типом первичного преобразователя (датчика).
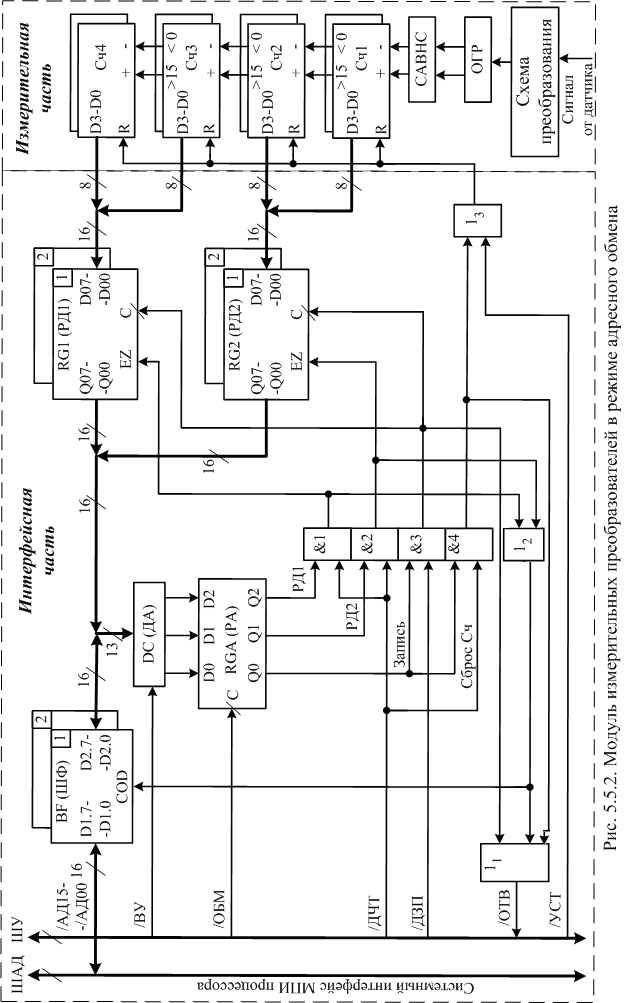
Поясним работу схему.
Измерительная часть МИП работает в непрерывном режиме, постоянно оцифровывая информацию, поступающую с ФИП. Сигналы с ФИП поступают через ОГР на САВНС. Схема автоматического выбора направления счёта в зависимости от соотношения сигналов Uвых1 и Uвых2 (рис. 5.5.1 б) формирует сигналы «+» или «-», которые подсчитываются счётчиками.
Процессор в соответствии с системным программным обеспечением периодически считывает информацию о действительном положении механизмов технологического оборудования с МИП. В данной схеме для обеспечения целостности информации процессор перед считыванием переписывает её в буферные регистры РД1 и РД2. Считывание осуществляется за два цикла обмена процессора с МИП.
В случае если разрядность счётчиков равна либо меньше разрядности шины данных необходимость в буферных регистрах отсутствует, так считывание будет осуществляться за один цикл обмена и этим обеспечивается целостность информации, получаемой от измерительной части.
 Диагностику
МИП наиболее просто организовать
программным путём с небольшой аппаратной
избыточностью (рис. 5.5.3).
Диагностику
МИП наиболее просто организовать
программным путём с небольшой аппаратной
избыточностью (рис. 5.5.3).
В схеме МИП необходимо предусмотреть программное обращение «+» и «-». Каждый холостой (без передачи данных) цикл подсчитывается счётчиками. После завершения диагностических обращений информация со счётчиков считывается процессором, на основании этой информации делается вывод об исправности работы МИП. Модуль диагностируется как при счёте в «плюс», так и «минус».
По завершении диагностики счётчики программно сбрасываются.
Недостатком данного метода является его значительные временные затраты на реализацию диагностики.
Проконтролировать работу МИП также можно посредством организации генератора импульсов, который выдаёт при одиночном запуске пачку с постоянным числом импульсов. Быстродействие данной схемы определяется частотой выдачи импульсов генератором.
Схема модуля фотоэлектрических импульсных преобразователей (МФИП) с обменом в режиме прерывания программы приведена на рис. 5.5.4.
МФИП, показанные на рис. 5.5.5-5.5.6 аналогичны модулям, представленным на рис. 5.5.2 и рис. 5.5.4 и отличаются только интерфейсной частью, соответствующей системе сигналов и протоколам И41.
Рис. 5.5.5. МФИП, подключаемый к интерфейсу И41 (адресный обмен)
При использовании индукционных первичных преобразователей схема преобразования, представленная на рис. 5.5.2, выполняет функции преобразования сдвига фаз между измерительным и опорным сигналами в число импульсов, которые подсчитываются счётчиками. Опорный сигнал, поступающий в схему, является сигналом генератора стабильной частоты и амплитуды (f=2,5-10 кГц), используемым для питания неподвижной обмотки индукционного первичного преобразователя (ИПП). Измерительный сигнал формируется подвижной обмоткой ИПП. Наиболее часто используются линейные и круговые индуктосины.
Схема преобразования может быть реализована на базе дискретных элементов, либо с использованием современных специализированных БИС.
