5. Модули микропроцессорных систем управления типа cnc
5.1. Модули вввода дискретных сигналов
Модули ввода дискретных сигналов (сигналов типа "ДА/НЕТ") гальванически развязывают и согласуют по току и напряжению сигналы, приходящие от различных датчиков технологического оборудования с сигналами микроЭВМ. К таким датчикам относятся: конечные выключатели крайнего положения механизмов перемещения по координатам; датчики безопасности, ограничивающие рабочую зону ТО; датчики положения и очувствления автооператора смены инструмента; датчики реле давления в пневмо- и гидросистеме; органы управления на пульте ТО (кнопки, переключатели и т.п.). Могут использоваться датчики контактного или бесконтактного типа.
На рис. 5.1.1 приведена схема модуля ввода дискретных сигналов (МВДС). Передача информации в процессор с внешнего устройства (ВУ) осуществляется в режиме программного обмена. Так как шина данных в МПИ 16-разрядная ввод информации в данном модуле осуществляется за два цикла обмена по адресам регистров данных РД1 и РД2. В качестве гальванической развязки используются схемы на базе оптопар. Данные оптопары используются и как преобразователи уровней напряжения (уровень входных элементов электроавтоматики во входные уровни микросхем). В модуле необходимо использовать буферные регистры, предназначенные для подключения к шинам интерфейса.
 Рис. 5.1.1. МВДС, подключаемый к интерфейсу
МПИ (программный обмен)
Рис. 5.1.1. МВДС, подключаемый к интерфейсу
МПИ (программный обмен)
Для диагностики модуля необходимо организовать дополнительные информационные потоки от процессора к регистрам. Для этих целей можно использовать мультиплексоры, как показано на рис. 5.1.2.
Рис. 5.1.2. Пример схемы организации диагностики в МВДС
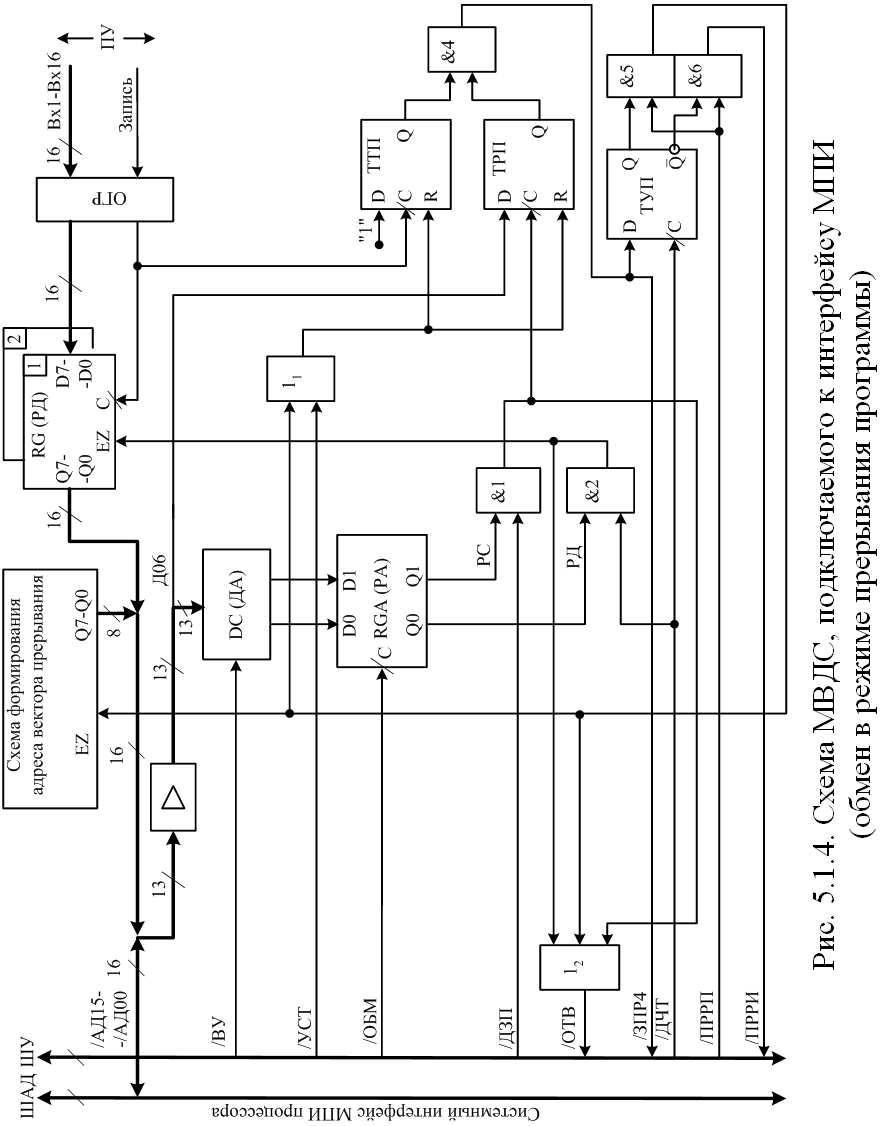
При вводе данных в режиме прерывания программы, инициатором обмена является внешнее устройство. В примере на рис. 5.1.4 сигналом запроса прерывания является сигнал "запись". По данному сигналу информация записывается в регистр данных РД и её необходимо передать в процессор. Одновременно этим сигналом устанавливается триггер требования прерывания ТТП. В результате выполнения процедуры прерывания считываются данные из РД.
В более сложных случаях возникает необходимость организовать прерывание от всех входных сигналов. В этом случае входные сигналы должны не только записываться в РД, но и использоваться для установки ТТП. Для выделения переднего фронта входных сигналов можно использовать схему формирования и суммирования импульсов (СФСИ, рис. 5.1.3). Запись входных сигналов в РД необходима для программного определения входа, по которому произошло прерывание. Приоритетность прерываний в этом случае также задаётся программно.
СФСИ может быть выполнена на логических микросхемах и D-триггерах с установочными R-S входами. В схеме передние фронты входных сигналов преобразуются в короткие импульсы и суммируются. Импульсы по длительности должны быть достаточны для установки ТТП и записи данных в РД.

Рис. 5.1.3. Схема организации прерывания от всех входных дискретных сигналов
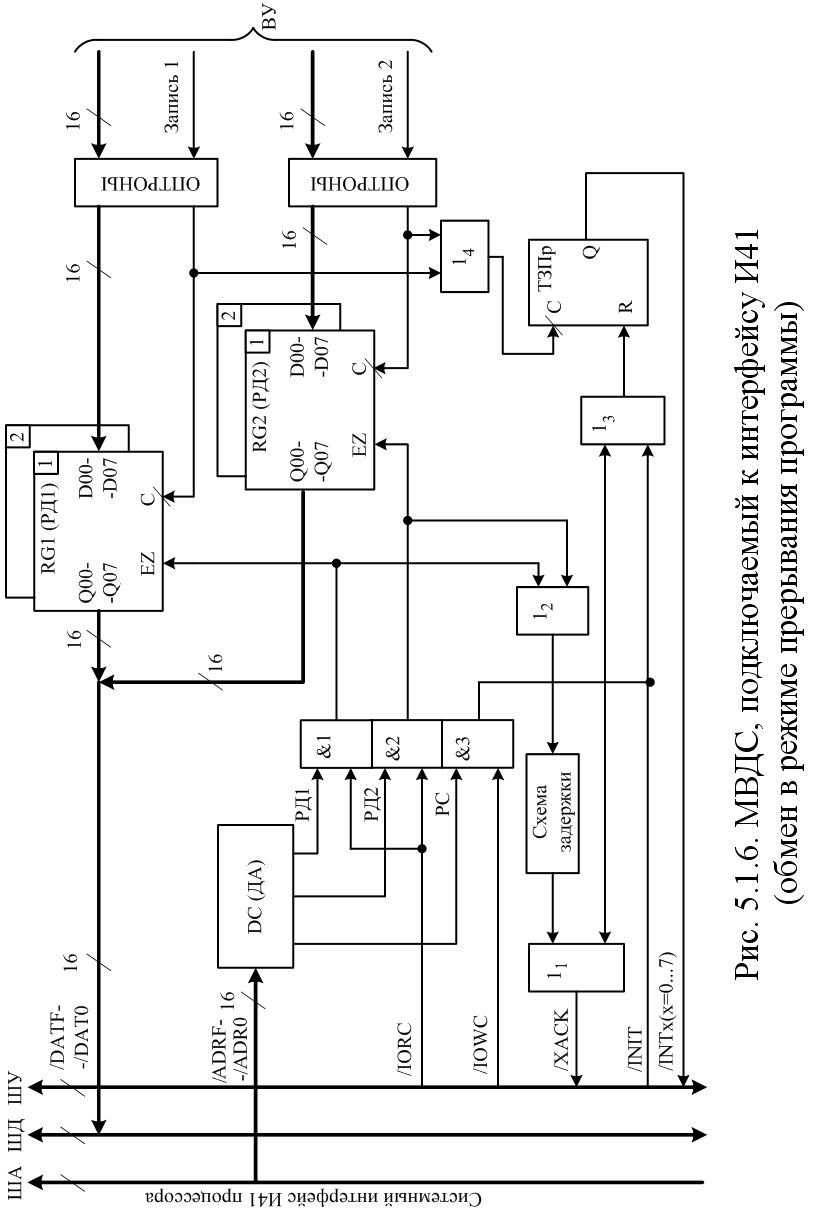
На рис. 5.1.5 и рис. 5.1.6 приведены схемы МВДС для интерфейса И41.
МВДС (рис. 5.1.7) аналогичен модулю рис. 5.1.1 и отличается только интерфейсной частью, соответствующей системе сигналов и протоколам И41.
В МВДС, представленном на рис. 5.1.6, обмен информацией с процессором может быть организован как в режиме программного обмена, так и в режиме прерывания программы. Для инициации обмена в режиме прерывания программы в модуле имеется триггер запроса прерывания, который формирует сигнал /INTХ при поступлении сигналов "Запись 1" или "Запись 2". Номер линии запроса прерывания Х=0÷7 определяется при установке модуля в систему управления и назначении ему приоритета среди других модулей. Ввод информации с ВУ в данном модуле при любом запросе прерывания будет осуществляться с обоих регистров РД1 и РД2. Определение достоверности считанной информации из регистров определяется на программном уровне.
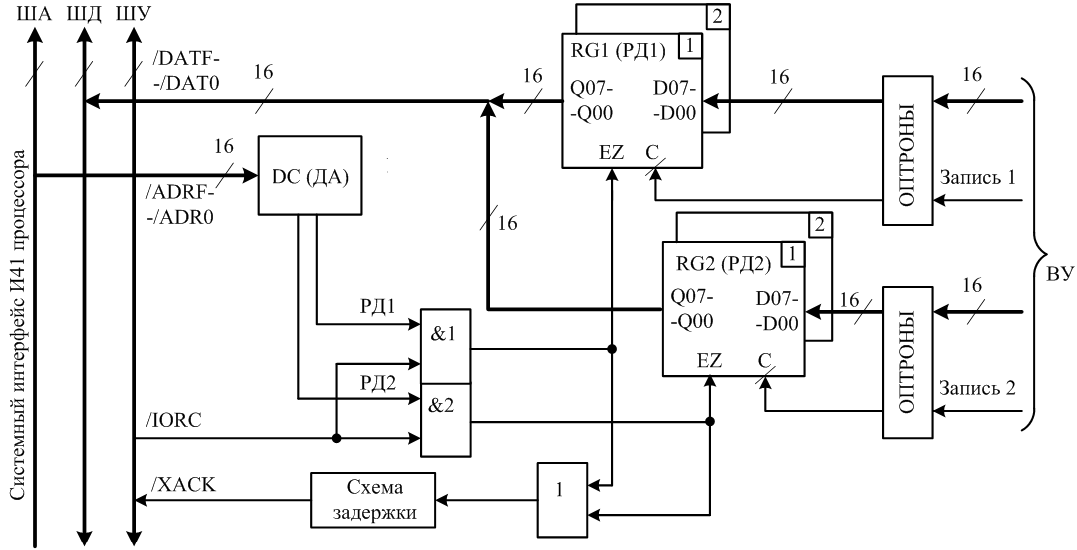
Рис. 5.1.5. МВДС, подключаемый к интерфейсу И41 (программный обмен)