

Министерство образования Российской Федерации
Санкт-Петербургский государственный электротехнический
университет (ЛЭТИ)
Кафедра автоматики и процессов управления
Лабораторная работа № 4
по дисциплине «Нечёткие системы управления»
на тему: « Нечеткие ПИД- регуляторы »
Задание № 3
Преподаватель: Кораблёв Ю.А.
Студенты гр.7323: Оршанский О.В
Романова Т. А.
Гороховатский А.В.
Санкт-Петербург
2001 г.
Постановка задачи. Для объекта управления:
1) синтезировать по указанному классическому образцу эквивалентный нечеткий регулятор;
2) получить зависимости времени регулирования и перерегулирования от параметров нечеткого регулятора, эквивалентных параметрам регулятора прототипа;
3) обосновать и выбрать оптимальные для данного объекта управления параметры нечеткого регулятора;
4) используя возможности нечеткого управления добиться улучшения качества процесса регулирования;
5) построить и сравнить статические передаточные характеристики в виде линий равного уровня выхода нечеткого регулятора относительно входов для
а) классического регулятора с параметрами, равными полученным эквивалентным (самостоятельно по уравнению регулятора);
б) эквивалентного нечеткого регулятора (по результатам моделирования);
в) улучшенного нечеткого регулятора (по результатам моделирования).
|
Вариант |
Обозначение ОУ |
Передаточная функция ОУ |
Тип регулятора |
|
3 |
PT1-I |
0.2 G(s) = ----------- s(10s+1) |
ПД |
-
Синтезирование по указанному классическому образцу эквивалентного нечеткого регулятора.
Введём в программу FuzzyPID параметры объекта и моделируемого нечёткого регулятора, причём параметры регулятора возьмём с стандартными функциями распределения, значения диапазона распределения параметров примем равными D [1].
Полученная структура системы с моделируемым нечётким ПД-регулятором, и моделируемыми функциями принадлежности представлена на рис 1.
Б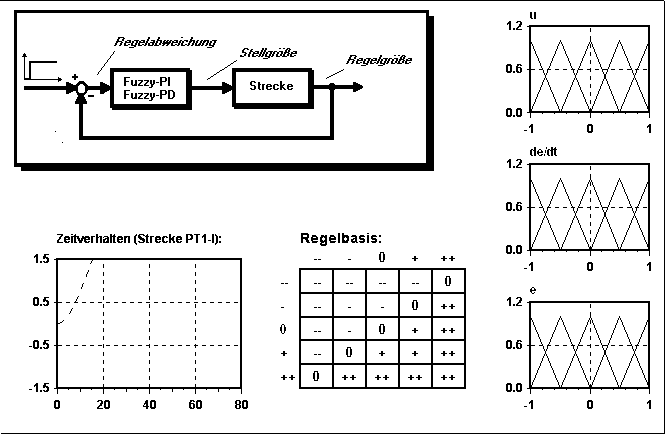 аза
правил для данной системы представлена
в таблице 1.
аза
правил для данной системы представлена
в таблице 1.
Рис.1
Таблица 1.
|
|
Производная по ошибке, de/dt |
||||
|
Ошибка регулирования, е |
-- |
-- |
-- |
|
0 |
|
-- |
- |
- |
0 |
++ |
|
|
-- |
- |
0 |
+ |
++ |
|
|
-- |
0 |
+ |
+ |
++ |
|
|
0 |
++ |
++ |
++ |
++ |
|

Как видно из приведённого графика переходный процесс разомкнутой системы является расходящимся, из чего следует необходимость стабилизации системы путём моделирования параметров fuzzy-регулятора.
Вид и качество переходных процессов представлены на рис.2.

Рис. 2.
Как видно из приведённого графика переходный процесс замкнутой системы является уже сходящимся процессом, но обладает большой колебательностью и временем регулирования, что оставляет возможность для дальнейшей оптимизации полученного регулятора.
2. Анализ нечеткой системы управления с эквивалентным регулятором.
Для анализа нечеткой системы управления с эквивалентным регулятором необходимо получить табличные зависимости перерегулирования (%) и времени регулирования tрег от эквивалентных коэффициентов пропорциональности между выходом и входом 1 квх1 и между выходом и входом 2 квх2.
После проведения соответствующего эксперимента в ходе которого менялись области определения функций принадлежности входов и выходов системы (и как следствие менялось их отношение, равное коэффициенту пропорциональности) такие значения были получены.
Значения по перерегулированию системы представлены в таблице 2, а значения по времени регулирования переходного процесса системы представлены в таблице 3 отчёта.
Таблица 2 (перерегулирование системы [ %])
|
|
Коэффициент пропорциональности k2 |
||||
|
1 |
0,5 |
0,25 |
2 |
||
|
Коэффициент пропорциональности k1 |
1 |
25 |
30 |
30 |
16,5 |
|
0,5 |
10 |
14,5 |
15,5 |
5 |
|
|
0,25 |
0 |
5 |
5 |
0 |
|
|
2 |
45 |
45 |
49 |
38 |
|
Таблица 3 (время регулирования ПП системы [tрег, с])
|
|
Коэффициент пропорциональности k2 |
||||
|
1 |
0,5 |
0,25 |
2 |
||
|
Коэффициент пропорциональности k1 |
1 |
52 |
55 |
55 |
35 |
|
0,5 |
50 |
50 |
50 |
27 |
|
|
0,25 |
45 |
40 |
39 |
55 |
|
|
2 |
53 |
66 |
66 |
27 |
|
Как видно из приведённых исследований оптимальными с точки зрения быстродействия и значения перерегулирования являются значения коэффициентов k1=0,5, k2=2, при которых характеристики динамики процесса будут следующими: = 5%, tрег,=27 сек., что в несколько раз превосходит по качеству исходный процесс.
Графики переходных процессов оптимизированной системы представлен на рис.3.
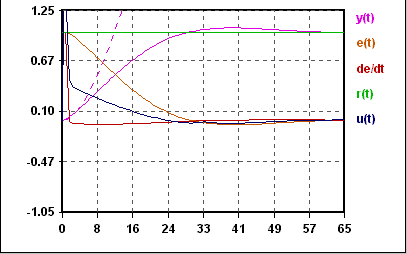
Рис.3
3. Оптимизация нечеткой системы управления fuzzy- методами.
Пытаясь оптимизировать данную систему fuzzy-методами будем изменять вид функций принадлежности при этом оптимизацию будем производить по быстродействию системы оставляя значение перерегулирования постоянным. В ходе эксперимента получим, что быстродействие системы зависит от того насколько значения вершин функций принадлежности входов сдвинуты к рабочей точке, а значения вершин функции принадлежности выхода разнесены от рабочей точки.
При проведении эксперимента было получено наилучшее значение по времени регулирования переходного процесса, которое составило: tрег = 20, что на 7 сек лучше исходного, при этом перерегулирование осталось на уровне = 5%.
Виды характеристик функций принадлежности для этого регулятора представлены на рис.4, а графики переходных процессов системы представлены на рис.5.
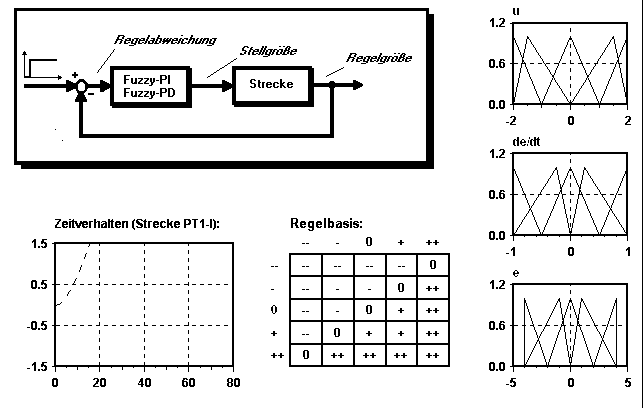
Рис.4
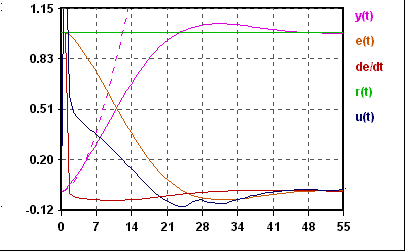
Рис.5