

Лабораторная работа 3 / 3. Типовая методика проектирования нечетких систем управления (Кораблёв)
.docМинистерство образования Российской Федерации
Санкт-Петербургский государственный электротехнический
университет (ЛЭТИ)
Кафедра автоматики и процессов управления
Лабораторная работа
по дисциплине «Нечёткие системы управления»
на тему: « Типовая методика проектирования нечетких систем управления »
Задание № 3
Преподаватель: Кораблёв Ю.А.
Студенты гр.7323: Оршанский О.В
Романова Т. А.
Гороховатский А.В.
Санкт-Петербург
2000 г.
Постановка задачи. Спроектировать нечеткую систему управления портовым контейнерным краном. Спроектированный fuzzy- контроллер должен обеспечить оптимальное управление процессом перегрузки контейнера с баржи на железнодорожную платформу в соответствии с заданными показателями качества, представленными в таблице 1:
Таблица 1
|
Точность |
Быстро действие |
Колебательность |
Расходэнергии |
Перерегулирование |
Время успокоения |
|
0.15 |
10 с |
20о |
- |
20 % |
- |
Управление перегрузкой осуществляется за счет изменения мощности тележки крана, что заставляет ее двигаться быстрее или медленнее. От скорости перемещения тележки в свою очередь зависит расстояние до цели и амплитуда колебаний контейнера на тросе.
В ходе выполнения эксперимента мы смоделировали ситуацию, когда управление тележкой можно описать всего двумя термами, а именно – подача в некоторый момент времени управляющего сигнала некоторой мощности на двигатель и отключение двигателя от управления в другой момент времени.
В результате этого мы получили следующие данные, которые представлены в
таблице 2:
Таблица 2
|
Положение тележки относительно баржи |
Мощность управляющего сигнала |
|
0 |
7,50 |
|
2,14 |
0 |
Качественные показатели процесса представлены ниже:
Погрешность – 0,14;
Максимальное отклонение угла – 18;
Время процесса – 10 сек.;
Как видно из приведённых характеристик процесса он удовлетворяет начальным требованиям и обладает некоторой привлекательностью, благодаря простоте реализации, что существенно упрощает поставленную задачу.
Описание нечёткой системы управления:
Введя полученную реализацию системы в программу fuzzyTECH, мы получим следующий результат:
На рис.1 представлены графики функций принадлежности для трёх переменных:
Рис.1а – угла вертикального отклонения положения груза от оси равновесия;
Рис.1б – дистанции между грузом и платформой;
Рис.1в – мощность сигнала управления, подаваемого на двигатель тележки;

Рис.1а.

Рис. 1б.
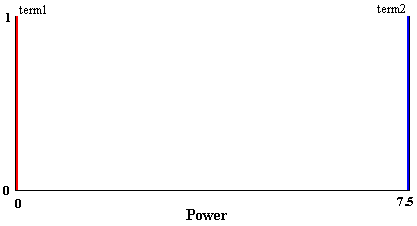
Рис. 1в.
В данном случае мы пытаемся исключить переменную «угол» из расчётов, для чего представляем её функцию принадлежности в виде миандра.
Функции принадлежности для мощности сигнала управления представляют собой синглтоны один из которых находится в значении соответствующим выключенному двигателю, а другой соответствует значению мощности 7,50.
Функция принадлежности дистанции состоит из двух термов, точка пересечения которых даёт значение 2,14, т.е. значение, соответствующее отключению двигателя от питания.
Схема данной системы представлена на рис.2.

Рис.2
База правил моделируемой системы представлена в таблице 3.
Таблица 3
|
IF |
THEN |
|
|
Angle |
Distance |
Power |
|
term1 |
term1 |
term1 |
|
term1 |
term2 |
term2 |
где по дистанции термы будут следующих значений:
term1 – «близко»;
term2 – «далеко»;
а по мощности управляющего сигнала термы будут следующих значений:
term1 – «отключить»;
term2 – «уровень 7,50»;
Далее осуществляем связку смоделированной модели управления системой с моделью портового крана. После чего запускаем процесс в автоматическом режиме.
Показатели качества процесса составили следующие значения:
Погрешность – 0,07;
Максимальное отклонение груза от положения равновесия – -18;
Время процесса – 12 сек.;
Как видно из приведённых параметров значение точности положения груза увеличилось, угол отклонения груза по сравнению с ручным способом управления не изменился, а время протекания процесса возросло и превысило критическую величину, зафиксированную в условии задачи.
После различных попыток уменьшить время выяснилось, что данное решение является оптимальным компромиссом между ростом угла при увеличении мощности управляющего сигнала (уже при значении 7,9 угол превышает значение -20, что недопустимо по условию задачи, хотя время при этом практически не уменьшается) и увеличением времени при уменьшении мощности.
Было принято решение пожертвовать быстродействием для улучшения точности процесса и поддержания значения угла отклонения груза в нужном диапазоне. Значение величины «2 сек.» решено принять за погрешность и считать, что существенного изменения в ход процесса она не несёт.
Динамические характеристики системы представлены на рис.4 для трёх значений переменных:
Рис.4а – динамика изменения угла отклонения груза от положения равновесия;
Рис.4б – динамика изменения дистанции между грузом и платформой;
Рис.4в – динамика изменения мощности управляющего сигнала подаваемого на
двигатель.

Рис.4а
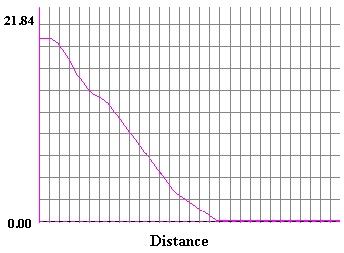
Рис.4б
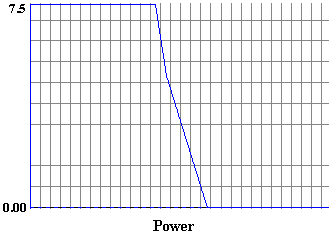
Рис.4в
Выводы по работе:
В ходе выполнения лабораторной работы была смоделирована система управления портовым краном, осуществляющим разгрузку баржи.
При выполнении моделирования были учтены начальные требования к будущей системе, такие как время переходного процесса, точность, колебательность объекта.
Проблемы учёта рассмотрены выше в ходе практической реализации. Было также выявлено, что на качество полученной системы ощутимо не влияет метод дефаззификации. Смоделированная система является простой и доступной для расчётов, т.к. содержит всего по два терма для каждой переменной, а переменная типа «угол» из расчёта исключена.