

Лабораторная работа 3 / Laba3(2)
.docЛабораторная работа №3
Типовая методика проектирования нечетких систем управления
Цель работы состоит в проектирование нечеткой системы управления портовым контейнерным краном. Спроектированный fuzzy – контроллер должен обеспечить оптимальное управление процессом перегрузки контейнера с баржи на железнодорожную платформу в соответствии с заданными показателями качества:
Точность: 0.2;
Быстродействие: нет;
Колебательность: 30;
Расход энергии: 30 кВт;
Перерегулирование: нет;
Время успокоения: 2с.
-
Выполнение эксперимента.
Управление перегрузкой осуществляется за счет изменения мощности тележки крана, что заставляет ее двигаться быстрее или медленнее. От скорости перемещения тележки в свою очередь зависит расстояние до цели и амплитуда колебаний контейнера на тросе.
В ходе выполнения эксперимента надо смоделировать ситуацию, когда контейнер будет находиться на железной платформе, при этом точность постановки должна составлять 0.2, колебательность не должна превышать 30 и система должна успокоиться в течение 2 с.
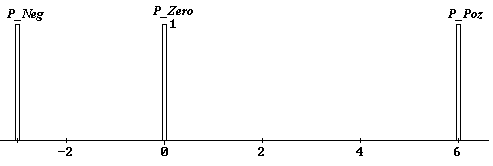
Управления тележкой опишем тремя термами, а именно – подача в некоторый момент времени управляющего сигнала некоторой мощности P_Poz (положительная мощность), отключение двигателя от управления P_Zero (нулевая мощность) и подача в некоторый момент времени управляющего сигнала некоторой мощности P_Neg (отрицательная мощность).
Так как колебательность не должна превышать 30, то максимальная мощность, которую можно подать на двигатель в начальный момент времени составляет 12 кВт. Из-за того, что ограничений по быстродействию нет, то можно двигаться медленно, при мощности 6 кВт это для того чтобы потом уложиться во время успокоения 2 с.
Из эксперимента видно, что:
-
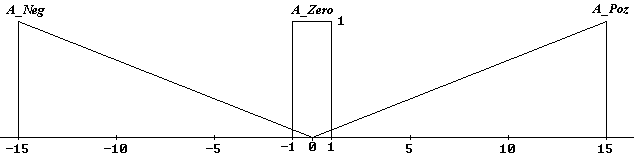
максимальный угол при старте: 15;
-
угол при движении: 7 – 10.
Эти данные можно использовать для построения функций принадлежности переменной Angle.
-
Структура нечеткой системы управления.
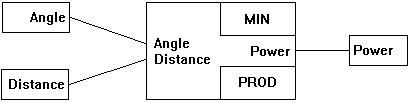
Согласно заданию наш Fuzzy регулятор на основании поступающих данных о дистанции до платформы (Distance) и углу отклонения (Angle) должен выдавать управляющее воздействие, которое обеспечивает точное передвижение контейнера и его постановку на платформу.
-
Формирование функций принадлежности и их размещение.
Для переменной Angle.
|
|
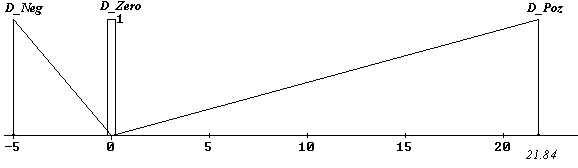
Для переменной Distance.
|
|
Для переменной Power.
|
|
-
Формирование базы правил
|
Если |
То |
|
|
|
Angle |
Distance |
Power |
|
|
A_Zero |
D_Poz |
P_Poz |
Движение из начального состояния, start; |
|
A_Neg |
D_Poz |
P_Poz |
Движение к платформе; |
|
A_Neg |
D_Zero |
P_Zero |
Остановка у платформы; |
|
A_Poz |
D_Neg |
P_Neg |
Возвращение к платформе; |
|
A_Zero |
D_Zero |
P_Zero |
Находимся над платформой, finish. |
Показатели качества процесса составили следующие значения:
Погрешность: 0,07;
Максимальное отклонение груза от положения равновесия: – 15;
Время процесса: 20 сек.;
Перерегулирование: 0,47
-
Динамические характеристики системы.
|
|
|
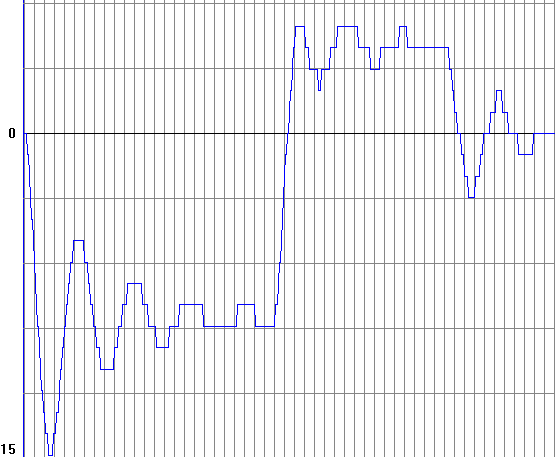
Динамика изменения угла отклонения груза от положения равновесия. |
|
|
|
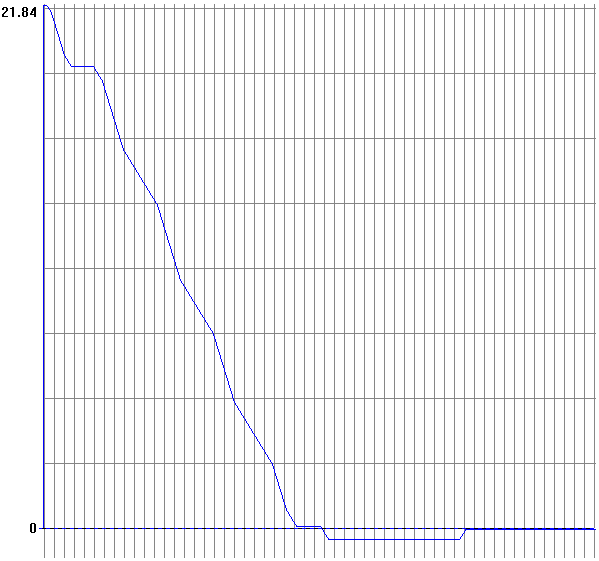
Динамика изменения дистанции между грузом и платформой. |
|
|
|
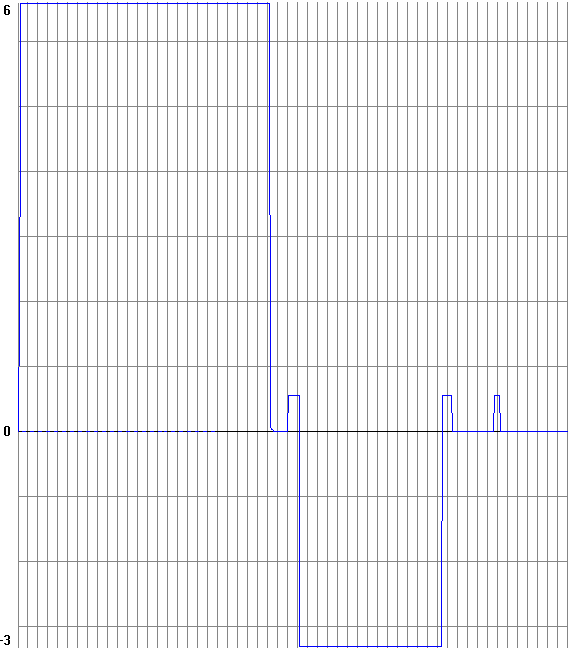
Динамика изменения мощности управляющего сигнала подаваемого на двигатель. |
Вывод.
В ходе выполнения лабораторной работы была смоделирована система управления портовым краном, осуществляющим разгрузку баржи.
При выполнении моделирования были учтены начальные требования к будущей системе, такие как точность, колебательность объекта и расход энергии.
Проблемы учёта рассмотрены выше в ходе практической реализации. Было также выявлено, что на качество полученной системы ощутимо не влияет метод дефазификации.