

Курсовая работа5 / Kurs Model
.docМОДЕЛИРОВАНИЕ
Моделирование системы провозилось в программной среде MATLAB\Simulink.
На рисунке приведена модель системы.
Р исунок
7.
Модель системы в Simulink.
исунок
7.
Модель системы в Simulink.
Переходные характеристики в системы по управляющему воздействию.
Н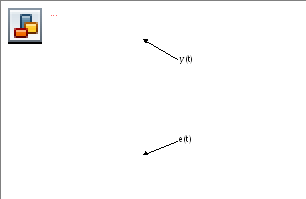 а
рисунках 8-10 представлены графики
переходных процессов в системе на
различные виды воздействий (ступенчатое,
линейно возрастающее, и гармоническое).
а
рисунках 8-10 представлены графики
переходных процессов в системе на
различные виды воздействий (ступенчатое,
линейно возрастающее, и гармоническое).
Рисунок 8. Реакция системы на ступенчатое воздействие.
Время регулирования 0,6 сек.
Установившаяся ошибка 0 рад.
Р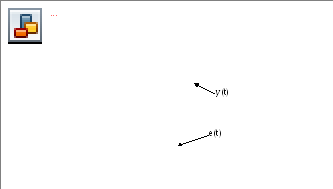 исунок
9. Реакция системы на линейно возрастающее
воздействие.
исунок
9. Реакция системы на линейно возрастающее
воздействие.
Максимальная ошибка 2,66*10-5 рад
Установившаяся ошибка 2,43*10-5 рад
Р исунок
10. Реакция системы на гармоническое
воздействие.
исунок
10. Реакция системы на гармоническое
воздействие.
Максимальная ошибка 2,5*10-5 рад
Как видно из графиков максимальная ошибка в системе не превышает допустимой ошибки равной 2,91*10-5 рад=6 угловых секунд. Таким образом система удовлетворяет заданным условиям точности.
Моделирование системы по возмущающему воздействию.
П ри
моделировании системы по возмущающему
воздействию, отключим управляющее. На
вход ПФ исполнительного двигателя по
возмущению подадим ступеньку,
соответствующую максимальному значению
нагрузки. Переходный процесс представлен
на Рисунке 11.
ри
моделировании системы по возмущающему
воздействию, отключим управляющее. На
вход ПФ исполнительного двигателя по
возмущению подадим ступеньку,
соответствующую максимальному значению
нагрузки. Переходный процесс представлен
на Рисунке 11.
Р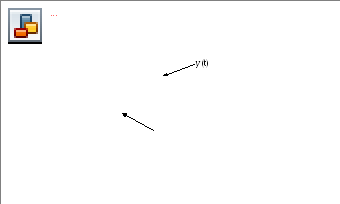 исунок
11. Реакция системы на возмущающее
воздействие.
исунок
11. Реакция системы на возмущающее
воздействие.
Р
e(t)
Из Рисунков можно видеть, что система устойчива к возмущениям, установившаяся ошибка по возмущению равна 0, а переходный процесс занимает около секунды. Но под влиянием возмущения сильно увеличивается ошибка, что приводит к потере точности системы.
АНАЛИЗ ЧУВСТВИТЕЛЬНОСТИ.
При
реальном построении системы параметры
исполнительных устройств могут отличаться
от исходных, что обуславливается
изменением внешних факторов, неточностью
изготовления и т.д., оценим степень
влияния изменения отдельных параметров
на различные характеристики системы.
Изменение параметров может повлиять
на статические и динамические
характеристики системы, проведем
исследование этого влияния. Для этого
будем изменять параметры соединения
ЭМУ-ИД -
![]() ,
относительно исходных. Значения
параметров и их влияние на характеристики
систем сведено в таблице:
,
относительно исходных. Значения
параметров и их влияние на характеристики
систем сведено в таблице:
Таблица 3.
|
Процентное изменение параметров |
Изменяемый параметр |
Численное значение параметра |
Максимальная
ошибка,
|
Максимальная
установившаяся ошибка,
|
Время
достижения установившегося режима,
|
|
Исходные |
|
0,5 |
2,65 |
2,43 |
0,8 |
|
|
1,56 |
||||
|
|
6 |
||||
|
+ 20 % |
|
0,6 |
2,73 |
2,43 |
1,1 |
|
|
1,87 |
2,82 |
2,43 |
1,2 |
|
|
|
7,2 |
2,53 |
2,41 |
0,75 |
|
|
- 20 % |
|
0,4 |
2,63 |
2,43 |
0,8 |
|
|
1,25 |
2,54 |
2,43 |
0,7 |
|
|
|
4,8 |
2,84 |
2,46 |
0,85 |
|
|
+50 % |
|
0,75 |
2,8 |
2,43 |
1,15 |
|
|
2,34 |
3,03 |
2,44 |
1,3 |
|
|
|
9 |
2,42 |
2,39 |
0,6 |
|
|
-50 % |
|
0,25 |
2,56 |
2,43 |
0,7 |
|
|
0,78 |
2,4 |
2,43 |
0,6 |
|
|
|
3 |
3,34 |
3,54 |
2 |
Графики переходных процессов приведены ниже.
Рисунок14
– изменение
![]() на 20%, Рисунок15 –
на 20%, Рисунок15 –
![]() на 50%;
на 50%;
Рисунок16
– изменение
![]() на 20%, Рисунок17 -
на 20%, Рисунок17 -
![]() на 50%;
на 50%;
Рисунок18
– изменение
![]() на 20%, Рисунок19 -
на 20%, Рисунок19 -
![]() на 50%.
на 50%.
Значения показателей качества сведены в табл. 3.
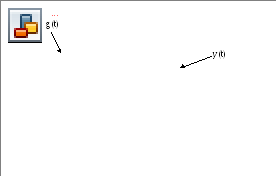
Рисунок 13.Гармоническое воздействие.
На Рисунке 13 изображено входное гармоническое воздействие и выходное значение угла поворота. Рассогласование этих значений и есть интересующая нас ошибка.
Р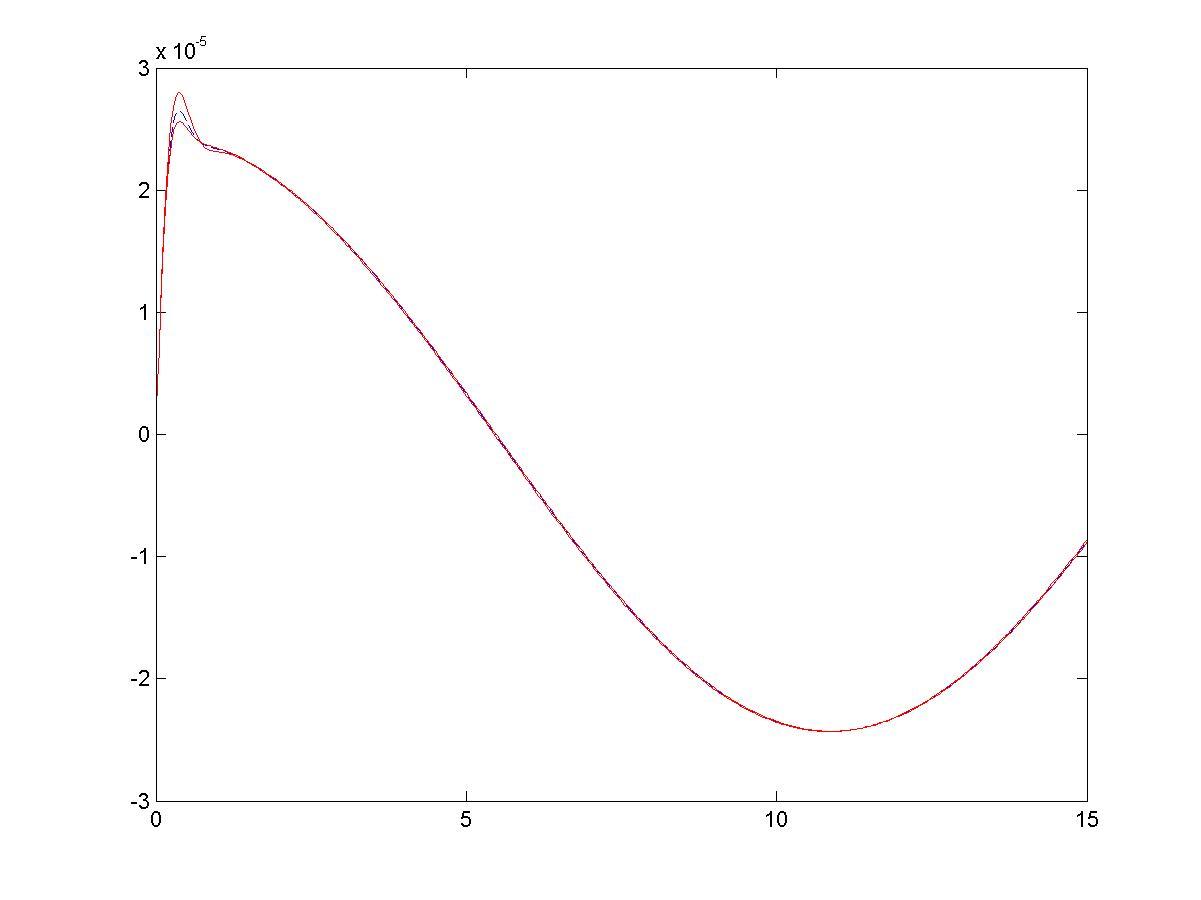
 исунок
14. Изменение
исунок
14. Изменение
![]() на
20 %.
на
20 %.
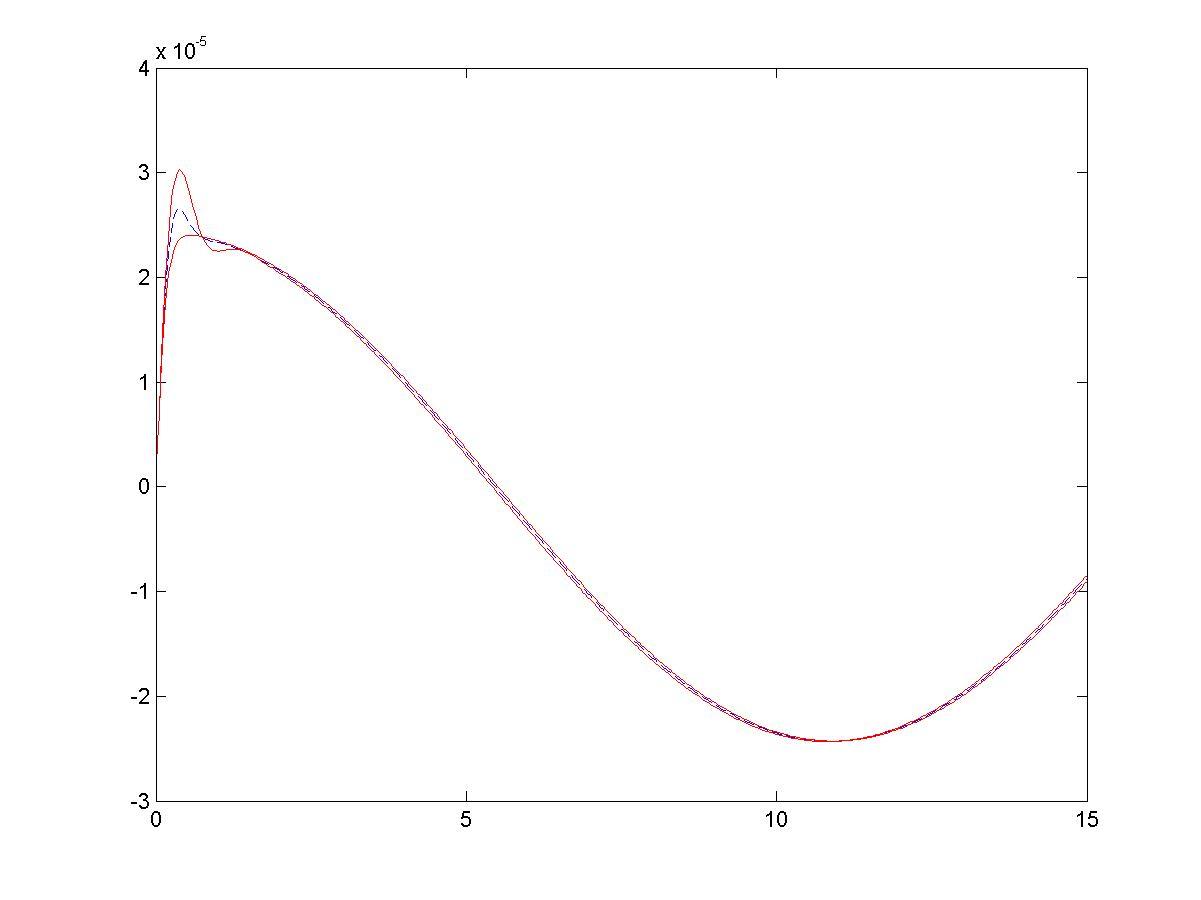
Рисунок
15. Изменение
![]() на
50 %.
на
50 %.
Р
 исунок
16. Изменение
исунок
16. Изменение
![]() на 20 %.
на 20 %.
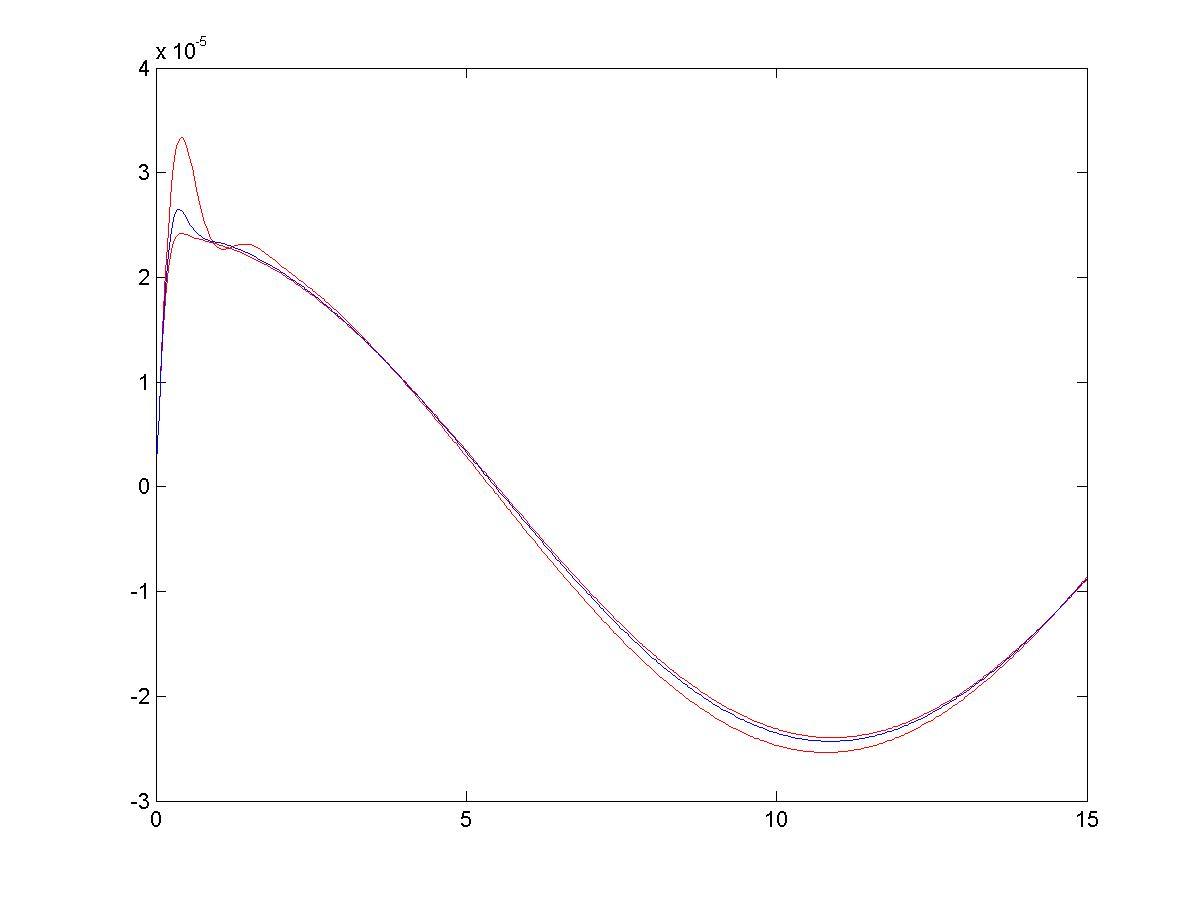
Рисунок
17. Изменение
![]() на 50 %.
на 50 %.
Рисунок
18. Изменение
![]() на
20 %.
на
20 %.
Р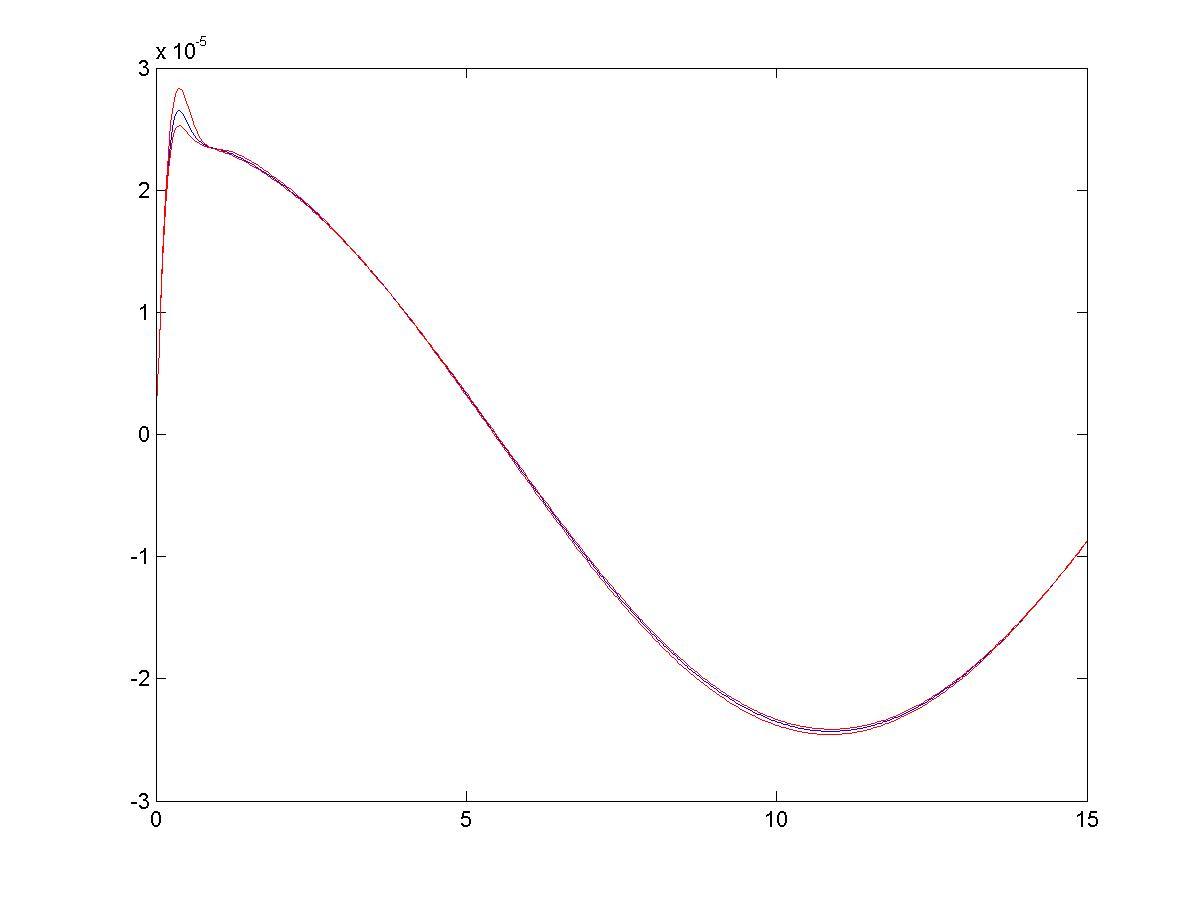
 исунок
19. Изменение
исунок
19. Изменение
![]() на
50 %.
на
50 %.
Вариации
параметров ИД не приводят к большим
изменениям свойств системы в целом,
например, к потере устойчивости.
Максимальная ошибка не удовлетворяющая
условиям задания наблюдается лишь при
увеличении
![]() или
или
![]() на 50%.Т.о. спроектированная система
является грубой. И соответствует
предъявленным к ней требованиям.
на 50%.Т.о. спроектированная система
является грубой. И соответствует
предъявленным к ней требованиям.
ИССЛЕДОАНИЕ ВЛИЯНИЯ НЕЛИНЕЙНОСТЕЙ
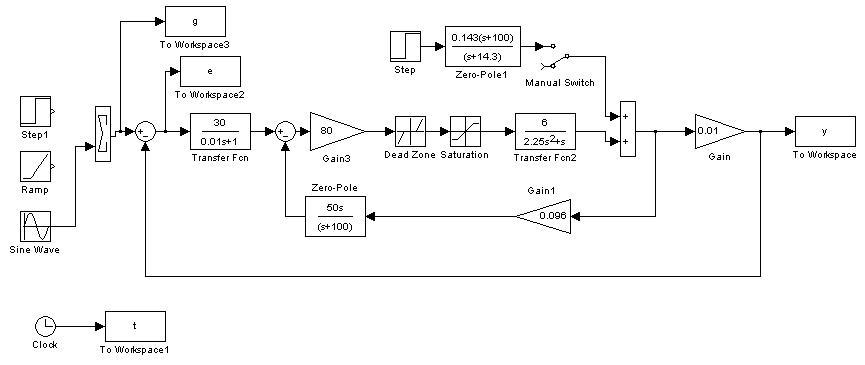
Рисунок 20. Модель системы с нелинейными элементами.
В реальной системе существуют ограничения на максимальную скорость двигателя, крутящий момент, и, следовательно, на напряжение на входе ЭМУ. Для ограничения напряжения часто используется блок ограничения (БО), который устанавливается на входе ЭМУ. БО ограничивает задающее напряжение максимальным уровнем. Таким образом БО представляет собой нелинейность типа «насыщение».
Для используемого ЭМУ максимальное напряжение на входе 230 В.поэтому перед ЭМУ необходимо установить нелинейный элемент «насыщение».
Помимо
ограничения на входное напряжение
существенным образом на точность системы
влияет напряжение трогания двигателя.
Это минимальное значение при котором
двигатель, преодолев моменты сил трения,
начнёт вращаться. Таким образом,
напряжение трогания представляет собой
нелинейность типа «мертвая зона».
Напряжение трогания
![]() обычно равно 5% от максимального значения
напряжения на входе.
обычно равно 5% от максимального значения
напряжения на входе.
![]() .
.
Дополнительным источником нелинейностей является редуктор. Однако для упрощения будем рассматривать его в виде линейного звена.
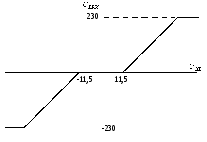
Рисунок 21.Статическая характеристика ЭМУ
Моделирование системы с нелинейностями выявило, что система не способна воспроизводить эквивалентное задающее воздействие с расчетной амплитудой порядка нескольких угловых секунд. При небольших отклонениях сигнал на выходе системы – нулевой. При больших отклонениях сигнал на выходе системы отрабатывает задающее воздействие, но с намного меньшей точностью. На рисунке 22 изображено гармоническое воздействие максимальная ошибка воспроизведения которого равна 4,8*10-3 рад. Таким образом соединение ЭМУ-ИД не позволяет получить заданную точность позиционирования.
Р исунок
22.
исунок
22.
Максимальная ошибка 4,8*10-3 рад
Рисунок 23. Реакция нелинейной системы на возмущающее воздействие.
Установившаяся ошибка 10-3 рад.
Из Рисунка 23 видно, что установившееся значение ошибки в нелинейной системе не равно нулю. Таким образом в нелинейной системе не просто сильно увеличилась ошибка но и появилась статическая ошибка.
Вывод.
В ходе выполнения курсового проекта была разработана силовая электромашинная следящая система воспроизведения угла поворота. Требования, предъявленные к ЭСС были выполнены. Кроме того, в ходе моделирования была показано, что система при вариации парметров ИД, качественно, не меняет своих характеристик, т.е. является грубой. Ислледования влияния НЭ на харктеристики системы, показала, что система теряет точность воспроизведения и появляется статическая ошибка.