

Лабораторная работа 5 / LABA5(2)
.docЛабораторная работа №5
Нечеткое управление нестационарными объектами.
Цель работы
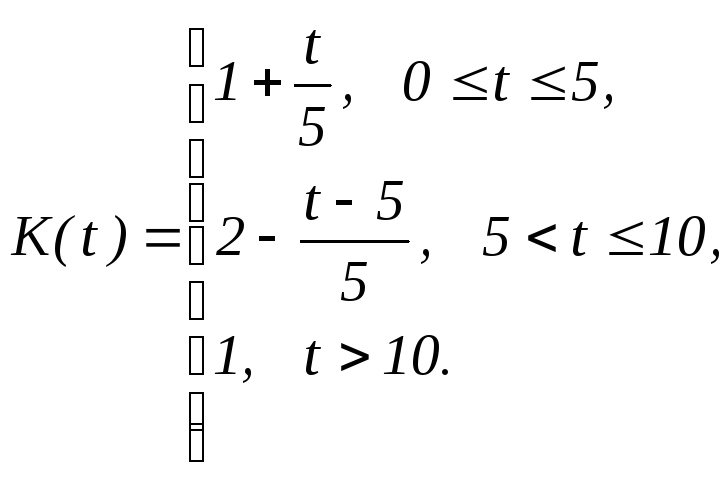
состоит в том, что бы для нестационарного
объекта с передаточной функцией
![]() у которого коэффициент усиления в
интервале
у которого коэффициент усиления в
интервале
![]() сначала линейно возрастает от 1 до 2, а
потом на интервале времени
сначала линейно возрастает от 1 до 2, а
потом на интервале времени
![]() 5<t10
снова линейно убывает до 1:
5<t10
снова линейно убывает до 1:
Постановка задачи:
1) синтезировать по указанному классическому образцу эквивалентный нечеткий регулятор со структурными параметрами, заданными в варианте задания;
2) получить зависимости времени регулирования и перерегулирования от параметров нечеткого регулятора, эквивалентных параметрам регулятора прототипа;
3) обосновать и выбрать оптимальные для данного объекта управления параметры нечеткого регулятора;
4) используя возможности нечеткого управления добиться улучшения качества процесса регулирования;
5) проанализировать влияние термов входных переменных fuzzy- регулятора на качество процесса регулирования.
Исходные данные для варианта 2 представлены в таблице 1.
Таблица 1.
|
Тип регулятора |
Механизм нечетких логических выводов |
Метод дефазификации |
|
ПД |
max-min |
Модифицированный метод центра тяжести |
Синтезирование по указанному классическому образцу эквивалентного нечеткого регулятора.
Введём в программу FuzzyPID параметры объекта и моделируемого нечёткого регулятора, причём параметры регулятора возьмём с стандартными функциями распределения, значения диапазона распределения параметров примем равными D [1] для управляющего сигнала, D [2] для входного сигнала ошибки и для производной ошибки D [ 1].
Полученная структура системы с моделируемым нечётким ПД-регулятором, и моделируемыми функциями принадлежности представлена на рис. 1. В таблице 2. представлена база правил для данной системы.
|
|
|
Рис. 1. Структурная схема. |
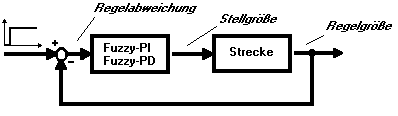
Таблица 2.
|
|
Производная
по ошибке,
|
|||||
|
– – |
– |
0 |
+ |
+ + |
||
|
Ошибка рег-ия, е |
– – |
– – |
– – |
– |
– |
0 |
|
– |
– – |
– |
– |
0 |
+ |
|
|
0 |
– |
– |
0 |
+ |
+ |
|
|
+ |
– |
0 |
+ |
+ |
+ + |
|
|
+ + |
0 |
+ |
+ |
+ + |
+ + |
|
|
|
|
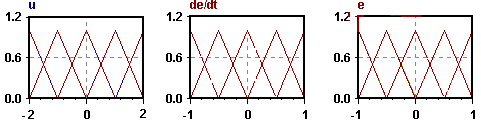
Рис. 2. Графики функций принадлежности. |
|
|
|
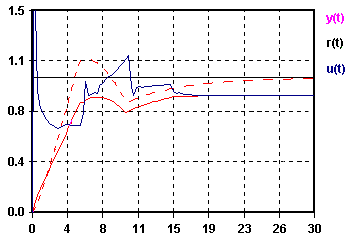
Рис. 3. График переходных процессов для данной системы. |
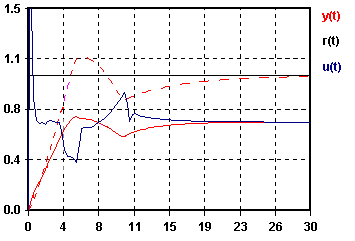
Из рис.3. видно, что вид переходного процесса по поведению в точности повторяет переходный процесс системы с классическим ПД-регулятором.
Анализ нечеткой системы управления с эквивалентным регулятором.
Для анализа нечеткой системы управления с эквивалентным регулятором необходимо получить табличные зависимости перерегулирования (%) и времени регулирования tрег от эквивалентных коэффициентов пропорциональности между выходом и входом 1 квх1 и между выходом и входом 2 квх2.
После проведения соответствующего эксперимента в ходе, которого менялись области определения функций принадлежности входов и выходов системы (и как следствие менялось их отношение, равное коэффициенту пропорциональности) можно сделать следующие заключения:
-
перерегулирование не превышает 10%, а время регулирования 18 с;
-
при увеличении коэффициента квх2 значение выходной переменной u имеет большую амплитуду и частоту.
Улучшения качества процесса регулирования.
При изменении вида функций принадлежности входных термов, а именно сдвиг вершин их ближе к рабочей точке удалось получить процесс с меньшим временем регулирования tрег = 16 с., при этом перерегулирование отсутствует = 0.
|
|
|
|
|
|

Анализ влияния термов входных переменных fuzzy- регулятора на качество процесса регулирования.
Фиксируем значения перерегулирования t и времени регулирования при последовательном отключении термов первой входной переменной (переменной по ошибке е) путем преобразования их в четкие множества (функция принадлежности - прямоугольник с высотой 1: при этом логическое "И" входных переменных будет всегда определяться вторым входом fuzzy- регулятора). В результате исследования возможных комбинаций составим таблицу 4 соответствия влияния термов на динамические характеристики переходного процесса.
|
|
|
|
|
|
|
|
|
|
t1=16 1=0 |
t12=16 12=0 |
t123=16 123=0 |
t1234=16, К 1234=0 |
t12345=16, К 12345=0 |
|
|
|
t2=16 2=0 |
t23=16 23=0 |
t234=16, К 234=0 |
t2345=16, К 2345=0 |
|
|
|
|
t3=16 3=0 |
t34=16 34=0 |
t345=16, К 345=0 |
|
|
|
|
|
t4=16 4=0 |
t45=16 45=0 |
|
|
|
|
|
|
t5=16 5=0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t1=16 1=0 |
t12=13, К 12=6% |
t123=10, К 123=10% |
t1234=10, К 1234=10% |
t12345=10, К 12345=10% |
|
|
|
t2=9, К 2=6% |
t23=13, К 23=6% |
t234=10, К 234=10% |
t2345=10, К 2345=10% |
|
|
|
|
t3=16 3=0 |
t34=16 34=0 |
t345=16 345=0 |
|
|
|
|
|
t4=16 4=0 |
t45=16 45=0 |
|
|
|
|
|
|
t5=16 5=0 |
|
|
|
|
|
При отключении большинства термов появляется перерегулирование, но оно не велико, единственный недостаток это то. Что система становиться колебательной это возникает из за того, что управление u изменяется на больших амплитудах и очень часто, что не желательно для объекта.