

4.3. Роликовые опоры
Для уменьшения провисания ленты между барабанами применяются роликовые опоры (рис. 4.4), которые, в свою очередь, опираются на металлоконструкцию конвейера. Верхние (рабочие) ролики поддерживают верхнюю (рабочую, нагруженную) ветвь ленты, а нижние (холостые) – нижнюю (нерабочую, незагруженную) ветвь.
По назначению роликовые опоры делятся на рядовые, расположенные по всей трассе конвейера, и специальные, устанавливаемые в отдельных местах конвейера (центрирующие, очистные, амортизирующие, переходные и др.). По числу роликов опоры делятся на одно-, двух-, трех- и пятироликовые (рис.4.4).
Для холостой ветви ленты применяются однороликовые, а иногда – двухроликовые опоры. Для рабочей ветви часто используются трехроликовые опоры с углом наклона осей боковых роликов γ = 10, 15, 20, 25, 30,35, 45 и 60 (см. рис. 4.4, в).
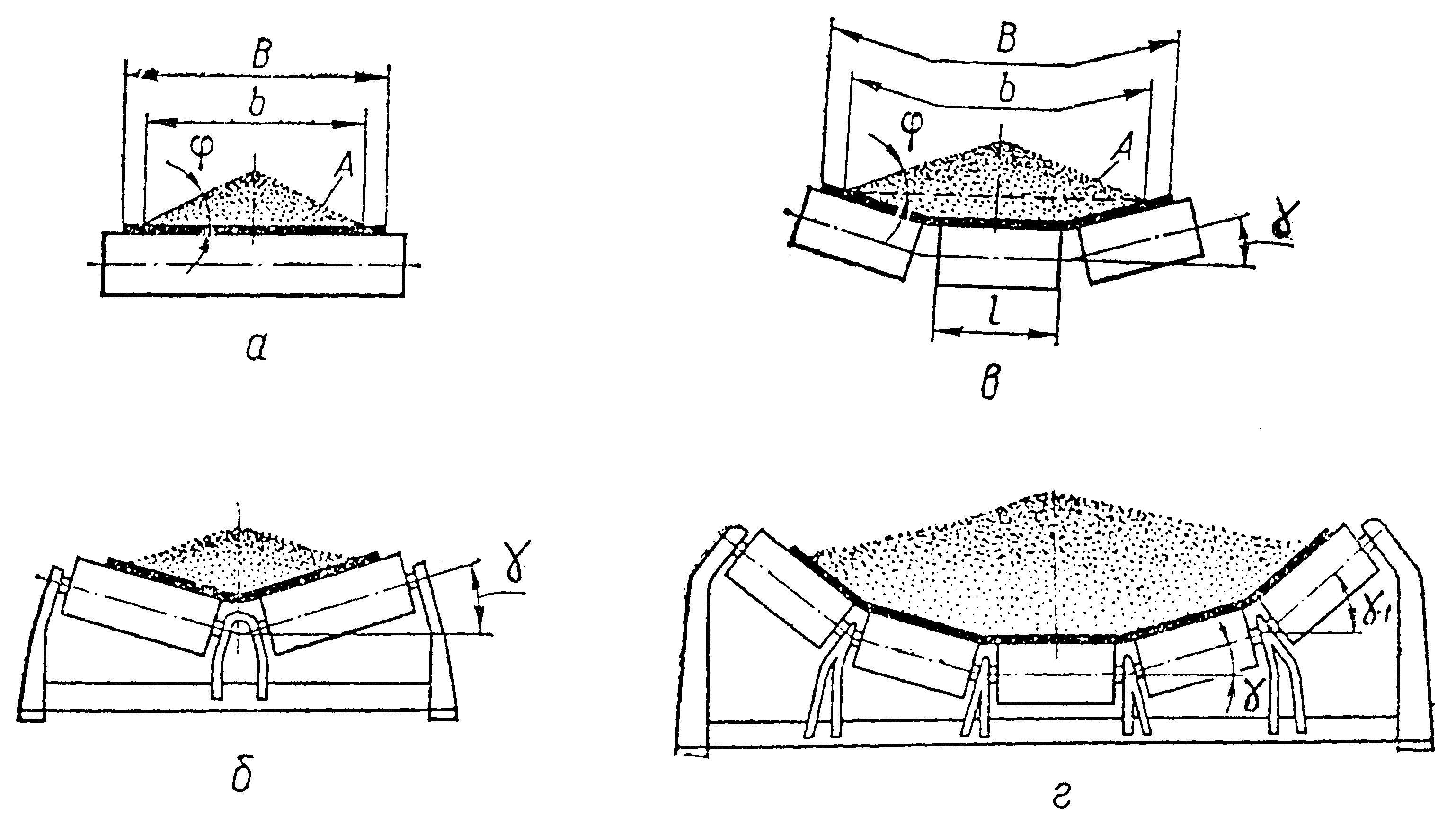
Рис. 4.4. Типы роликовых опор: а – однороликовая; б – двухроликовая; в – трехроликовая; г – пятироликовая
Однороликовые опоры обычно применяются для перемещения насыпных или штучных грузов при небольшой производительности конвейера, двухроликовые – в передвижных конвейерах легкого типа, пятироликовые – для высокопроизводительных конвейеров с широкой лентой. Повышение производительности конвейера при использовании желобчатой формы ленты достигается в результате увеличения площади сечения транспортируемого насыпного груза.
Конструкция ролика приведена на рис. 4.5. Корпус 1 ролика изготавливается преимущественно из стальных труб диаметром 63…245 мм, реже – литым. Диаметр ролика выбирается в соответствии с данными табл. 4.3 в зависимости от ширины ленты и плотности транспортируемого груза, а его длина принимается на 100…200 мм большей ширины ленты. Корпус ролика с вкладышами 2 устанавливается на неподвижной оси 3 с помощью подшипников качения 5, которые защищены от попадания в них загрязнений с наружной стороны лабиринтным уплотнением 4. Ось 3 ролика закрепляется на неподвижных кронштейнах, соединенных с металлоконструкцией конвейера.
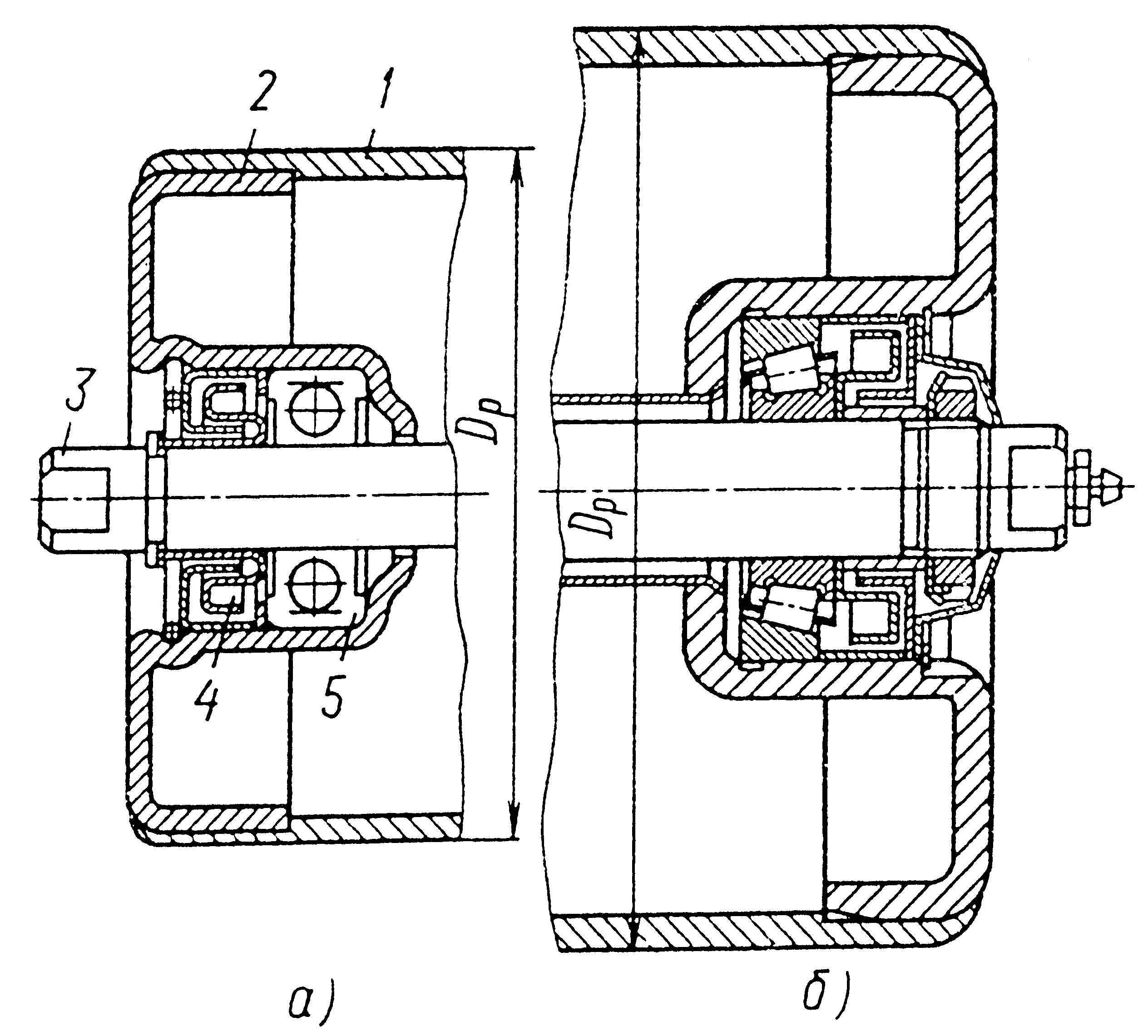
Рис. 4.5. Конструкция конвейерного ролика: а – легкого типа; б – тяжелого типа
Таблица 4.3
Рекомендации по выбору диаметра ролика
-
Диаметр ролика, мм
Ширина ленты, мм
Плотность груза, т/м3
Максимальная
скорость ленты, м/с
89
400, 500, 650
1,6
2,0
800
1,6
1,6
108
400, 500, 650
2,0
2,5
800, 1000, 1200
1,6
2,5
133
800, 1000, 1200
2,0
2,5
159
800, 1000, 1200
3,5
4,0
1400,1600, 2000
3,5
3,2
194, 219, 245
800, 1000, 1400
3,5
4,0
1600, 2000
4,0
6,3
В зависимости от несущей нагрузки различают ролики легкого и тяжелого типа. Ролики легкого типа устанавливают на шариковых подшипниках, тяжелого типа – на конических. Основные параметры роликов для ленточных конвейеров регламентированы ГОСТ 22646 – 77.
Шаг роликов рабочей ветви lрр выбирается по табл. 4.4 в зависимости от ширины ленты и плотности груза. В местах загрузки расстояние lрр уменьшают до 0,5 м.
Таблица 4.4
Расстояние lрр между роликоопорами рабочей ветви конвейера, м
-
Ширина ленты, мм
Расстояние lрр в зависимости от плотности транспортируемого груза, т/м3
менее0,8
0,8…1,6
1,6…2,0
2,0…2,5
более 2,5
400
1,5
1,4
1,4
1,3
1,2
500
1,5
1,4
1,4
1,3
1,2
650
1,4
1,3
1,3
1,2
1,2
800
1,4
1,3
1,3
1,2
1,1
1000
1,3
1,2
1,2
1,1
1,1
1200
1,3
1,2
1,2
1,1
1,1
1400
1,3
1,2
1,2
1,1
1,1
1600
1,3
1,2
1,2
1,1
1,1
2000
1,3
1,2
1,1
1,0
1,0
Шаг роликов холостой ветви lрх принимается в два раза большим, т.е. lрх = 2lрр.
Условная линейная (погонная) плотность роликов (кг/м) для рабочей рр и холостой рх ветвей ленты равна соответственно:
рр = mрр/lрр, рх = mрх/lрх, (4.4)
где mрр и mрх – массы роликов (кг) рабочей и холостой ветвей, соответственно, определяемые по каталогам заводов-изготовителей.
Усредненные значения погонного веса роликов qpp = ррg и qpх = рхg для конвейеров общего назначения приведены в табл. 4.2.
При отсутствии табличных данных массу роликов можно оценить по следующим эмпирическим формулам:
mрр 220В; mрх 130(В – 0,2), (4.5)
где В – ширина ленты, м.
Провисание ленты между опорами увеличивает угол наклона ленты при ее набегании на поддерживающий ролик, что приводит к ссыпанию груза, а также к возрастанию ударных нагрузок на ролик при транспортировке штучных или крупнокусковых грузов. Поэтому провисание ленты необходимо ограничивать.
Максимальная стрела провисания ленты ymax (м) имеет место на участке с минимальным натяжением Fmin (Н) посередине между опорами и определяется по формуле
ymax = (qг + qл)lрр2/(8Fmin),
где qг и qл – линейные силы тяжести груза и ленты, соответственно, Н/м.
Отсюда необходимое минимальное натяжение ленты будет равно
Fmin = (qг + qл)lрр2/(8ymax).
Натяжение Fmin должно быть таким, чтобы провисание ленты не превышало следующей величины:
[ymax] = (0,018…0,030)lрр.
Для конвейеров металлургических предприятий, работающих в тяжелых условиях, принимается меньшее значение [ymax] = 0,018lрр.
Следовательно, для конвейеров металлургических предприятий минимальное натяжение ленты должно удовлетворять следующему условию:
Fmin 7(qг + qл)lрр. (4.6)
Линейная (погонная) сила тяжести насыпного груза qг (Н/м) связана с его линейной (погонной) массой L (кг/м) зависимостью
qг = Lg 10L. (4.7)
Аналогично находится нагрузка от собственного веса ленты и других элементов конвейера.
Для предотвращения смещения ленты от продольной оси конвейера, применяют центрирующие роликоопоры, устанавливаемые через каждые 8…9 неподвижных роликоопор.
Центрирующая желобчатая роликоопора (рис. 4.6, а) имеет обычную трехроликовую
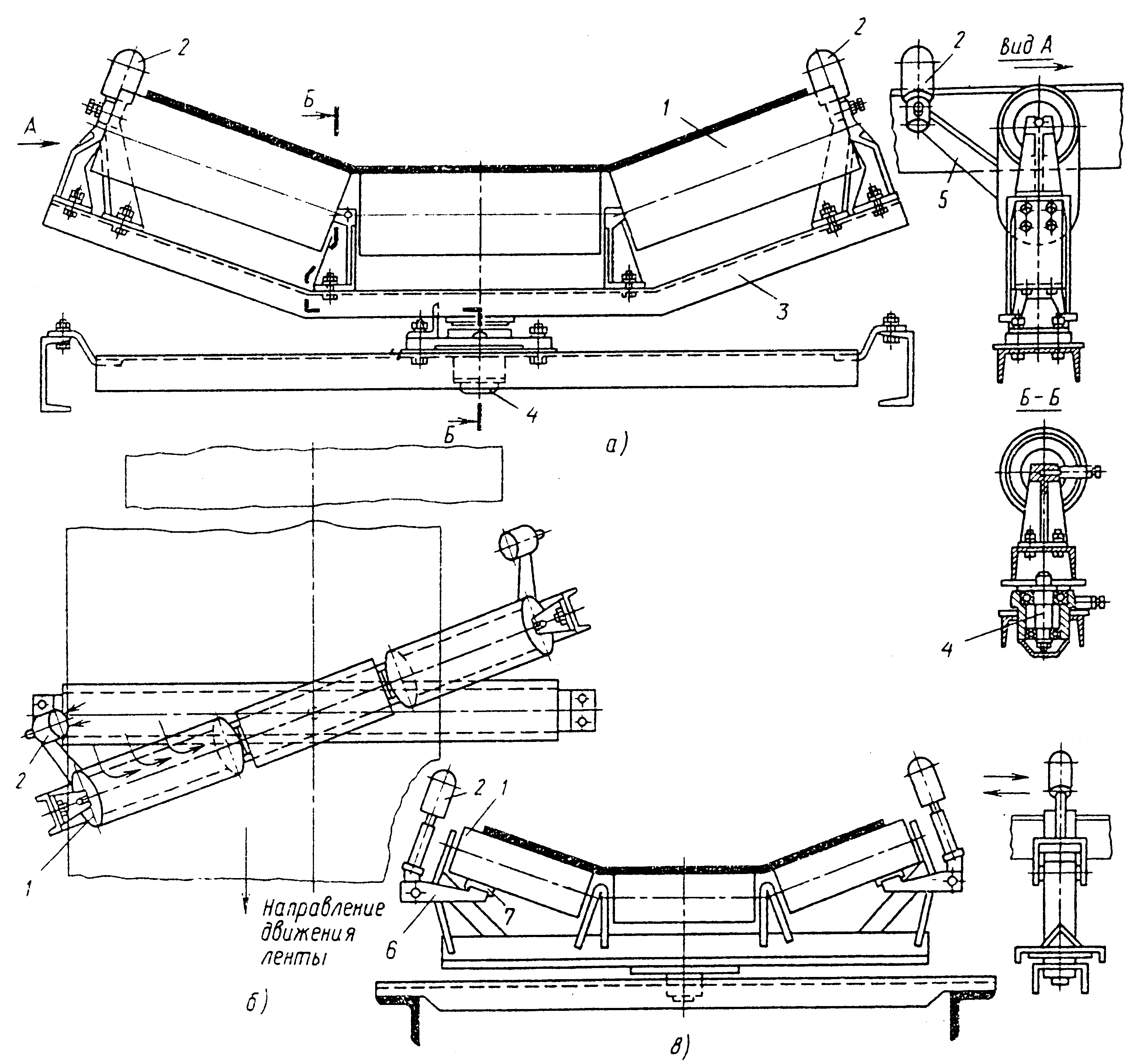
Рис. 4.6. Центрирующие роликоопоры для верхней ветви ленты: а – конструкция; б – схема поворота при сдвиге ленты в левую сторону для нереверсивного конвейера; в – конструкция для реверсивного конвейера
опору 1, установленную на раме 3, которая в определенных пределах может поворачиваться на вертикальной оси 4. К поворотной раме 3 с обеих сторон прикреплены рычаги 5, на концах которых установлены ролики 2. При смещении влево (рис. 4.6, б) лента своей кромкой нажимает на ролик 2 и поворачивает раму с роликоопорой на некоторый угол по отношению к продольной оси конвейера. При перекосе роликоопоры на поверхности ленты возникает восстанавливающее усилие, стремящееся возвратить ленту в исходное положение. После того, как лента возвратится в исходное «центральное» положение, роликоопора под действием самой ленты автоматически устанавливается в нормальное положение.
На конвейере с реверсивным движением ленты ролики 2 (рис. 4.6, в) устанавливаются по оси центрирующей опоры; они воздействуют через рычаг 6 и прижим 7 на боковой ролик 1, притормаживая его. Это обусловливает поворот роликоопоры для центрирования ленты.
Для снижения динамических нагрузок и защиты ленты от разрушения в местах загрузки применяются амортизирующие роликоопоры, в которых ударные нагрузки гасятся с помощью пружин или резиновых элементов.