

1. Классификация транспортирующих машин
Транспортирующие машины можно разделить на две основные группы:
1 – с тяговым органом (ленточные и цепные конвейеры, элеваторы);
2 – без тягового органа (роликовые, винтовые и инерционные конвейеры; пневматические, гидравлические и гравитационные устройства).
В машинах первой группы тяговый элемент (лента, цепь, канат) одновременно является и несущим элементом, при этом груз размещается либо непосредственно на тяговом элементе, либо на прикрепленных к нему устройствах.
Рассмотрим транспортирующие машины с тяговым органом.
Ленточный конвейер (рис. 1.1, а) состоит из приводного 4 и натяжного 1 барабанов и ленты 2, охватывающей барабаны с натяжением и транспортирующей груз 3. Тяговое усилие от приводного барабана к ленте передается посредством сил трения.
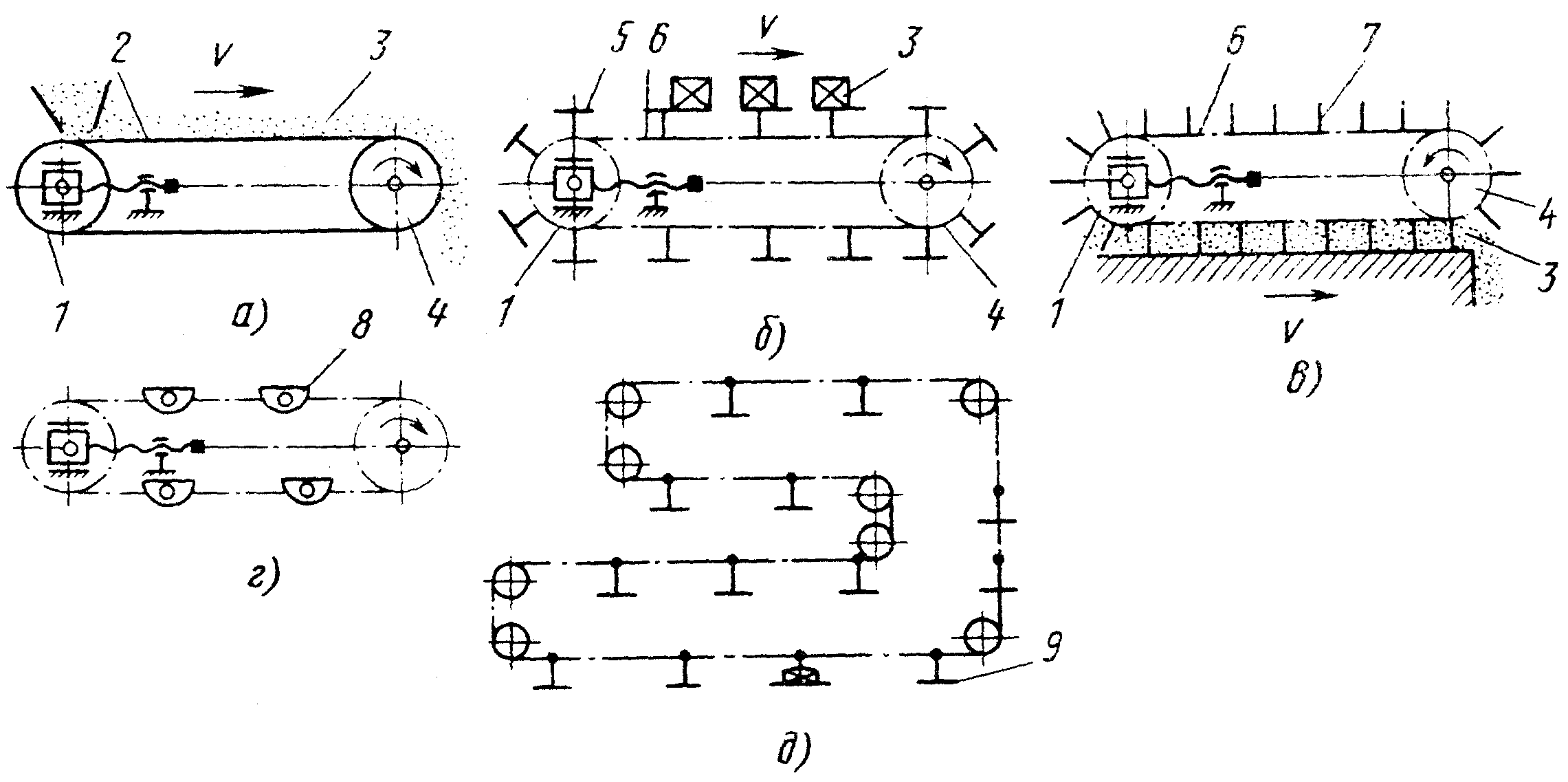
Рис. 1.1. Схемы конвейеров с тяговым органом: а – ленточного; б – пластинчатого цепного; в – скребкового цепного; г – ковшового цепного; д – люлечного цепного
Цепной конвейер (рис. 1.1, б – д) состоит из приводной 4 и натяжной 1 звездочек и цепи 6, входящей в зацепление с обеими звездочками. Тяговое усилие от приводной звездочки к цепи передается с помощью зацепления. Для перемещения груза 3 к цепи крепят специальные устройства: пластины 5, скребки 7, ковши 8, люльки 9 и т.п.
Элеватор – устройство для непрерывного транспортирования груза в вертикальном или наклонном направлении с помощью грузонесущего органа (ковша, люльки, полки и др.), прикрепленного к тяговому элементу (ленте или цепи).
Далее рассмотрим транспортирующие машины без тягового органа.
Роликовый конвейер (рольганг) (рис. 1.2, а) – конвейер, на котором перемещение груза 2 происходит с помощью вращающихся роликов 1, оси которых установлены в подшипниках на раме конвейера. Такие конвейеры обычно используются для перемещения груза, имеющего высокую температуру.
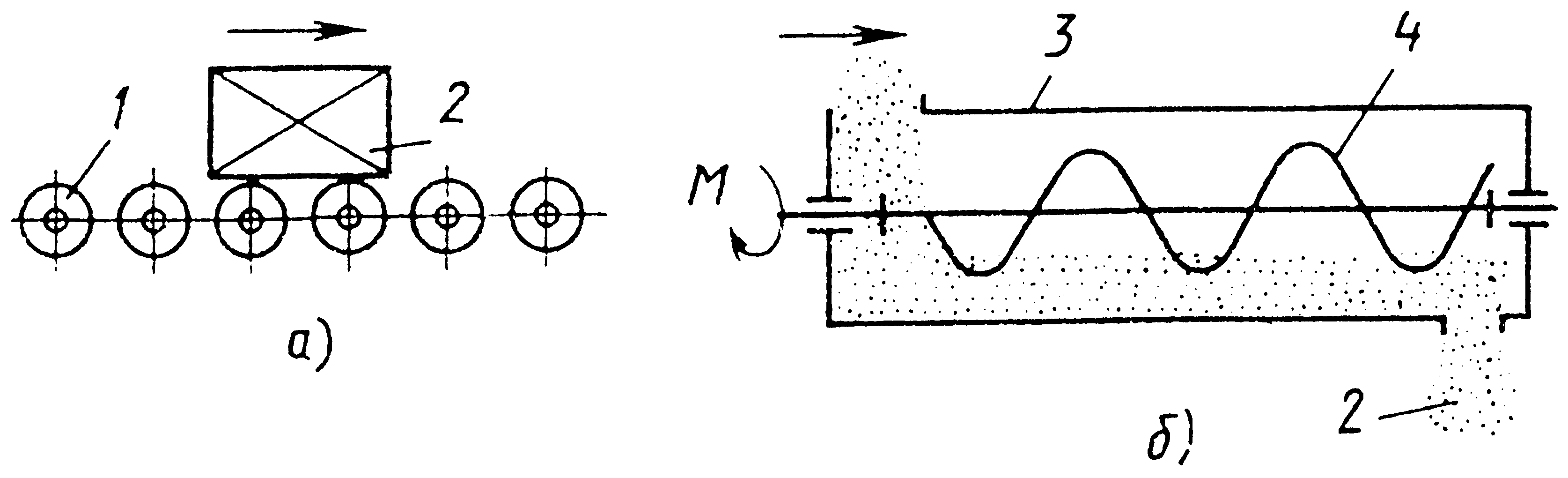
Рис. 1.2. Схемы конвейеров без тягового органа: а – роликового; б – винтового
Винтовой конвейер (рис. 1.2, б) – конвейер, в котором перемещение груза 2 в неподвижном корпусе 3 производится посредством вращения винтового вала 4 (вала с винтовыми лопастями).
Винтовая труба (рис. 1.3) по принципу действия аналогична винтовому конвейеру и представляет собой полый цилиндр 1, внутри которого на стенках установлены винтовые выступы 2. При вращении трубы 1 с помощью приводного ролика 4 груз 3 перемещается вдоль оси с помощью выступов 2.
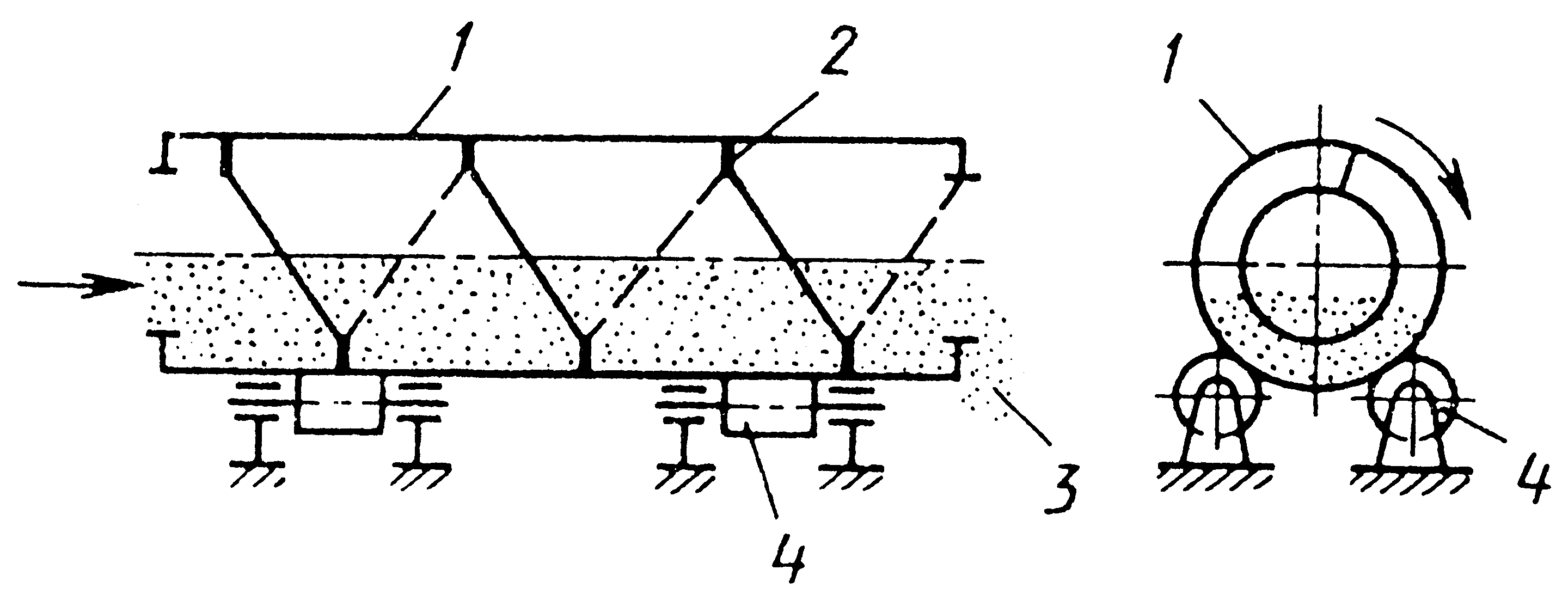
Рис. 1.3. Схема транспортирующей винтовой трубы
Гравитационные устройства для транспортирования груза выполняются в виде наклонных или винтовых спусков, по которым груз перемещается под действием собственной силы тяжести.
Наклонный спуск (рис. 1.4, а) состоит из трех участков: на участке 1 с большим углом наклона груз 2 разгоняется до заданной скорости, на участке 3 замедляет движение, а затем останавливается на участке 4.
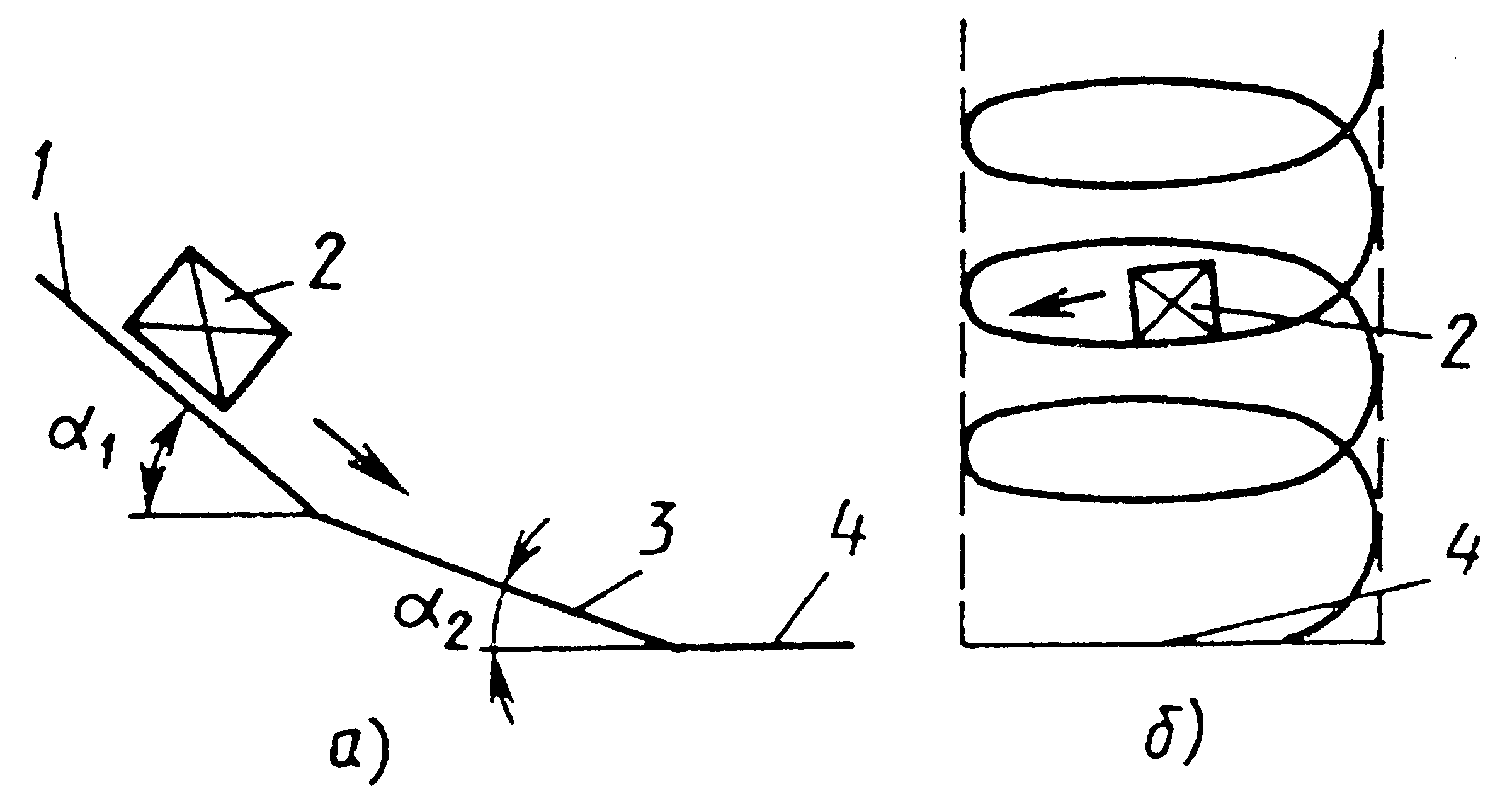
Рис. 1.4. Схемы гравитационных транспортных устройств: а – наклонного; б – винтового
Винтовые гравитационные устройства (рис. 1.4, б) имеют меньшую ширину корпуса и поэтому более компактны.
В инерционном конвейере перемещение груза происходит под действием сил инерции. По принципу действия их делят на две группы: 1 – вибрационные, в которых груз отрывается от желоба и перемещается микроскачками; 2 – качающиеся, в которых груз скользит по желобу.
Амплитуда и частота колебаний желоба вибрационного конвейера составляют 0,5...5 мм и 450...3000 Гц соответственно; качающегося – 10...150 мм и 40...400 Гц соответственно.
Пневматические и гидравлические устройства осуществляют перемещение сыпучих, волокнистых и кусковых материалов в потоке воздуха или жидкости по трубам или желобам.
В настоящем пособии подробно рассмотрен наиболее распространенный на металлургических предприятиях тип транспортирующих машин – ленточный конвейер.
Для создания ленточного конвейера необходимо знать его производительность и характеристику транспортируемых грузов.