КУРСОВАЯ / Другие пояснительные / механизм 6
.docx-
Схема 6
-
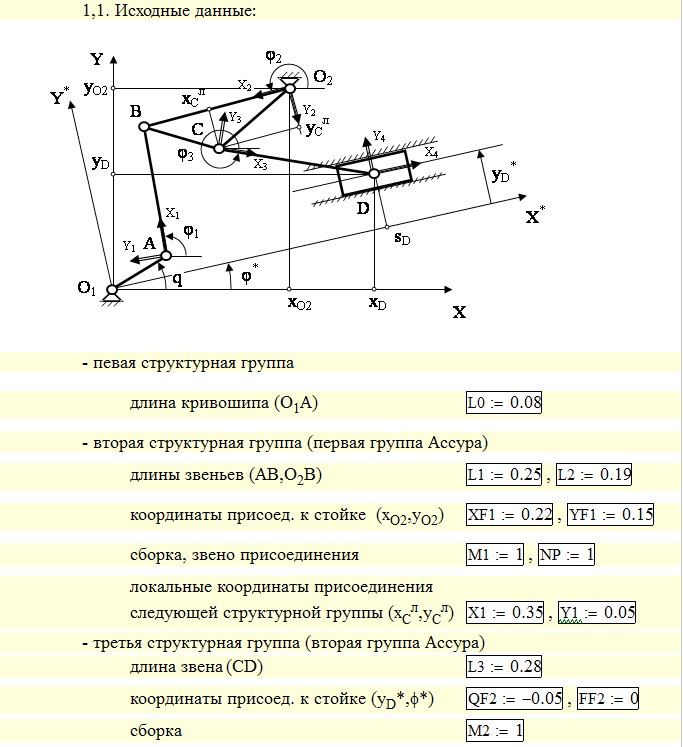
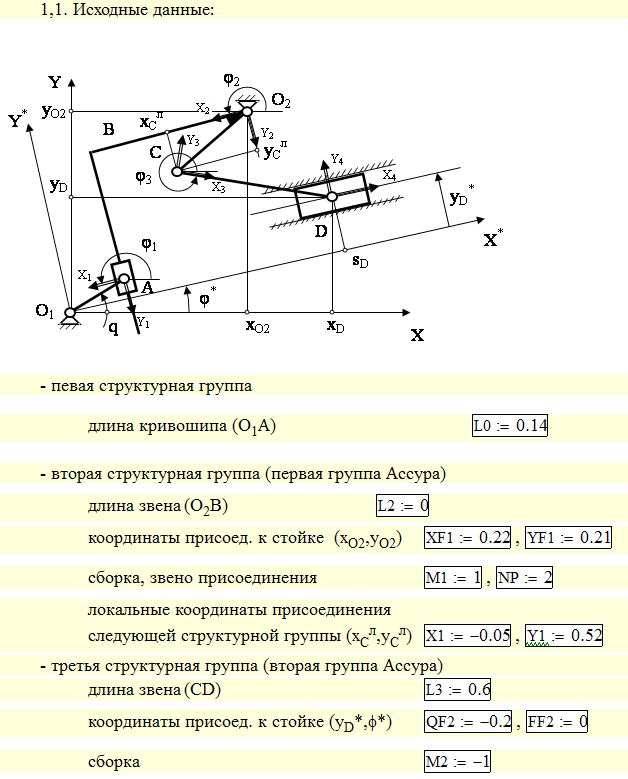
Исходные данные
Длины и координаты звеньев (м):








Схема, построенная по исходным данным при q=0, представлена на рис. 4.1:
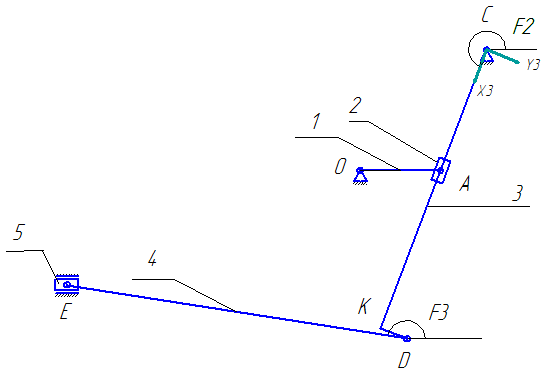
Рис. 4.1
Ввод исходных данных в стандартной программе, представлен в прилож. 3.
-
Структурный анализ
Структурным анализом называется разделение всего механизма на структурные группы, в целях упрощения исследования данного механизма.
Граф механизма, представлен на рис. 4.2: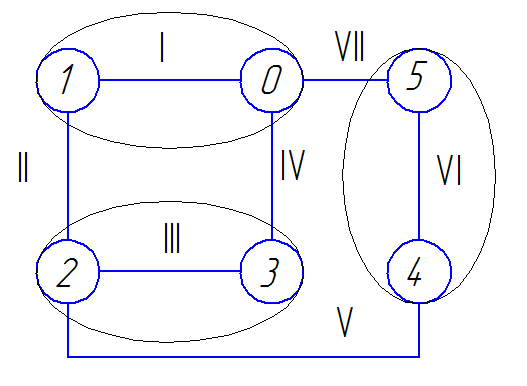
Рис. 4.2
Число подвижных звеньев механизма N=5.
Число низших кинематических пар pн = 7;
Число высших кинематических пар pв = 0;
Степень подвижности механизма:

Механизм нормальный.
-
Геометрический анализ
На рис. 4.3 представлен план 12 положений механизма. В приложении 9 представлен увеличенный план 12 положений.

Рис. 4.3
План составлен в соответствии с рис.
4.1. Каждое из 12 положений отлично от
предыдущего на
 относительно звена ОА.
относительно звена ОА.
-
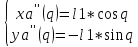
Составление уравнений геометрического анализа
 , где
, где

2)
 , где
, где
 ,
,

3) ,
где
,
где

4)
 ,
где
,
где

5) ,
где
,
где

-
Сборки
На рис. 4.4 представлен вариант сборки M1=1, M2=1.
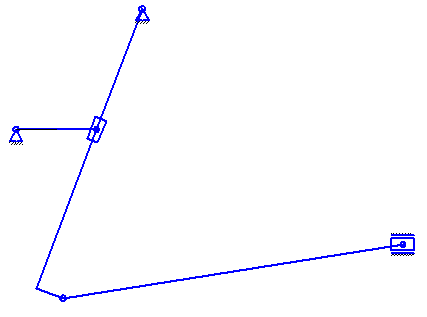
Рис. 4.5
На рис. 4.5 представлен вариант сборки M1=1, M2=-1.
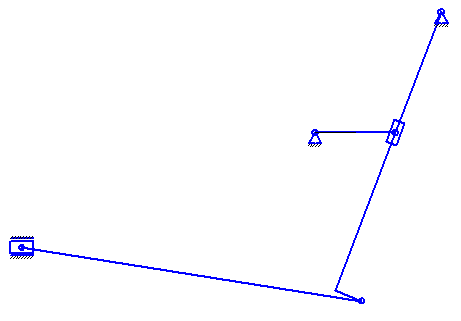
Рис. 4.5
-
Особые положения
На рис. 4.6 представлено особое положение
группы ВПВ, при
 :
:
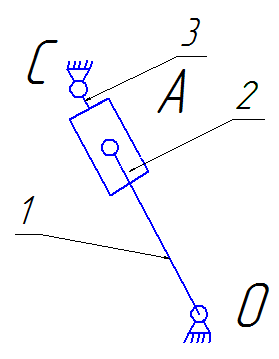
Рис. 4.8
На рис. 4.9 представлено особое положение группы ВВП:
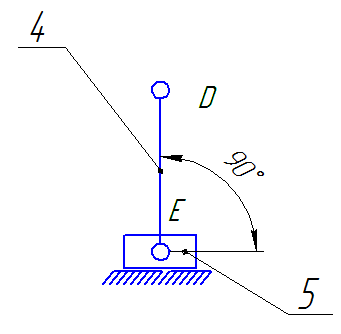
Рис. 4.9
-
Решение уравнений геометрического анализа
-
Первую систему решаем подстановкой входной координаты (q).
-
Вторая система: Возводим обе части в квадрат, складываем и выражаем AC:
 Затем
подставляем u в первоначальный
вид системы, чтобы получить
Затем
подставляем u в первоначальный
вид системы, чтобы получить
 и
и
 :
:
-
Системы 3 и 4 решаются подстановкой входной координаты q.
-
Из пятой системы находим sin
 :
:

-
Потом координату xe(q):

-
Кинематический анализ механизма
Задачей кинематического анализа является определение скоростей и ускорений точек механизма угловых скоростей и угловых ускорений его звеньев при заданных первых и вторых производных по времени от обобщенных координат.
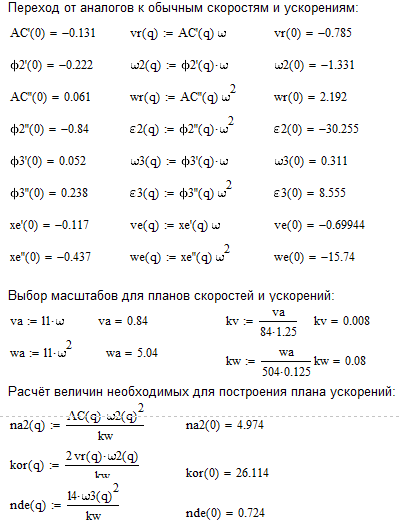
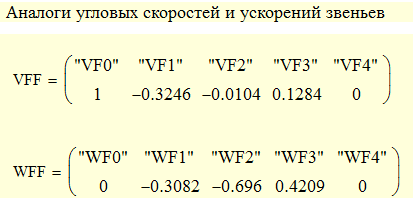
Нахождение скоростей и ускорений звеньев рычажного механизма:
Аналог скорости - первая производная по обобщенной координате.
Аналог ускорения - вторая производная по обобщенной координате.
Все линейные аналоги скоростей измеряются
в м/c. Ускорений в
 .
.
1) Нахождение аналогов скоростей и
ускорений точки А:
Дифференцируем
уравнения координат точки А по обобщенной
координате
(q), для нахождения аналогов скоростей:
 Получим:
Получим:
 Продифференцируем
снова и получим аналоги ускорений:
Продифференцируем
снова и получим аналоги ускорений:
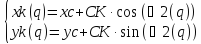
2) Нахождение производных AC,
а также аналогов скорости и
ускорения звена CKD:
Дифференцируем
уравнения координат точки А через точку
C по обобщенной координате
(q), для нахождения производной AC,
а также аналога скорости CKD:
 Получим:
Получим:
 Где
аналог угловой скорости звена CKD
и первая производная AC
равны:
Где
аналог угловой скорости звена CKD
и первая производная AC
равны:

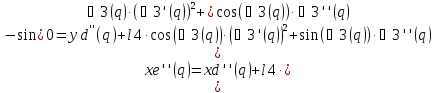
 Дифференцируя
повторно, получим вторую производную
AC и аналог углового
ускорения CKD:
Дифференцируя
повторно, получим вторую производную
AC и аналог углового
ускорения CKD:

Нахождение аналогов скоростей и ускорений точки K (необходимой для упрощения нахождения аналогов скоростей и ускорений точки D). Дифференцируем уравнения координат точки K по обобщенной координате (q), для нахождения аналогов скоростей:
 Получим:
Получим:

Дифференцируя повторно, получим аналог ускорения точки K:
 Нахождение
аналогов скоростей и ускорений точки
D:
Нахождение
аналогов скоростей и ускорений точки
D:
 Дифференцируем
уравнения координат точки D
по обобщенной координате (q),
для нахождения аналогов
скоростей:
Дифференцируем
уравнения координат точки D
по обобщенной координате (q),
для нахождения аналогов
скоростей:
 Дифференцируя
повторно, получим аналог ускорения
точки D:
Дифференцируя
повторно, получим аналог ускорения
точки D:

4) Нахождение аналогов скорости и
ускорения точки E:
Дифференцируем
уравнения координат точки E
по обобщенной координате (q),
для нахождения аналогов
скоростей:
 Получим:
Получим:
 Где
угловая скорость звена DE:
Где
угловая скорость звена DE:
 Продифференцируем
снова и получим аналоги ускорений:
Продифференцируем
снова и получим аналоги ускорений:
 Где
угловое ускорение звена DE:
Где
угловое ускорение звена DE:

-
План скоростей и ускорений в положении q=0
На рис. 4.10 изображён механизм в положении q=0
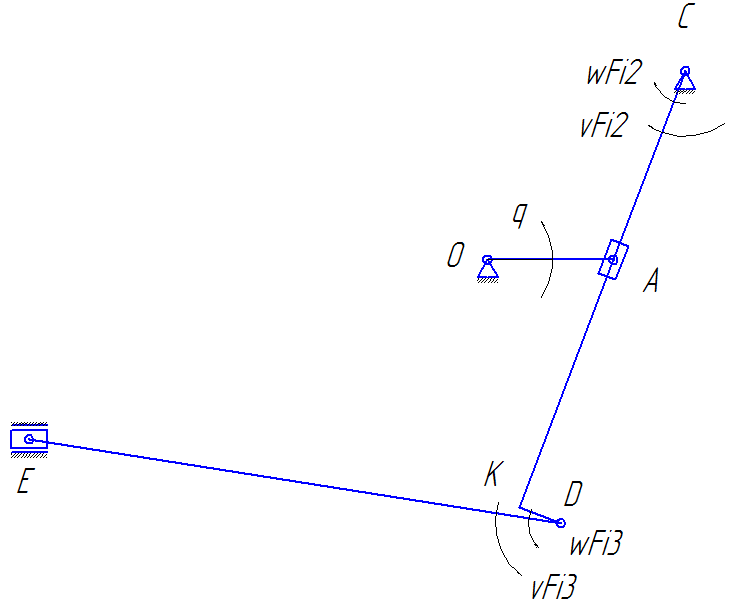
Рис. 4.10
-
Подготовка к построению планов скоростей и ускорений при q=0
Абсолютные скорости всегда начинаются в полюсе.
Относительные соединяются в соответствующих точках.
-
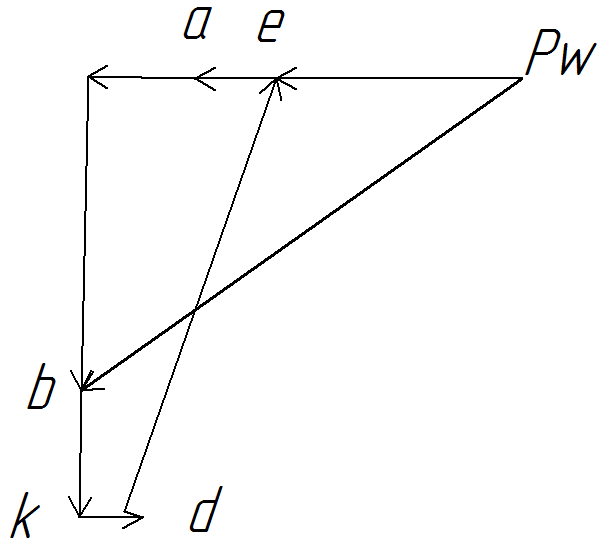
Построение плана скоростей при q=0
Формулы:


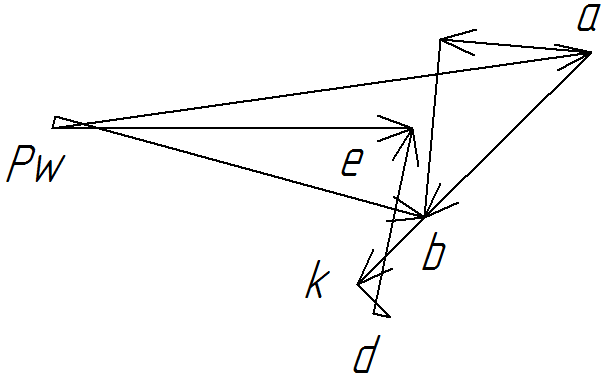
На рис. 4.11 изображен рисунок плана
скоростей для положения и q=0.Сам
план в масштабе Kv=0.008
 можно найти в приложении.
можно найти в приложении.

Рис. 4.11
-
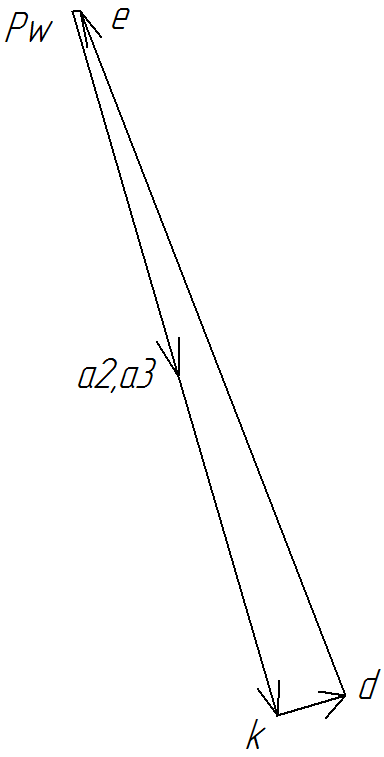
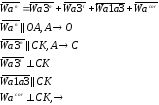
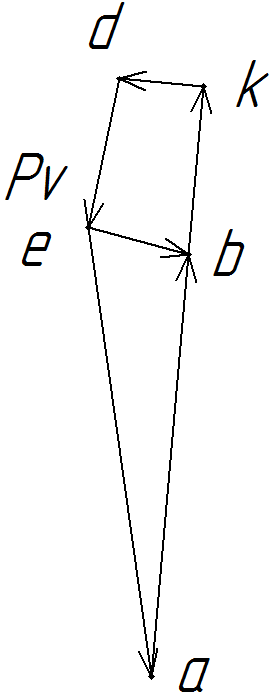
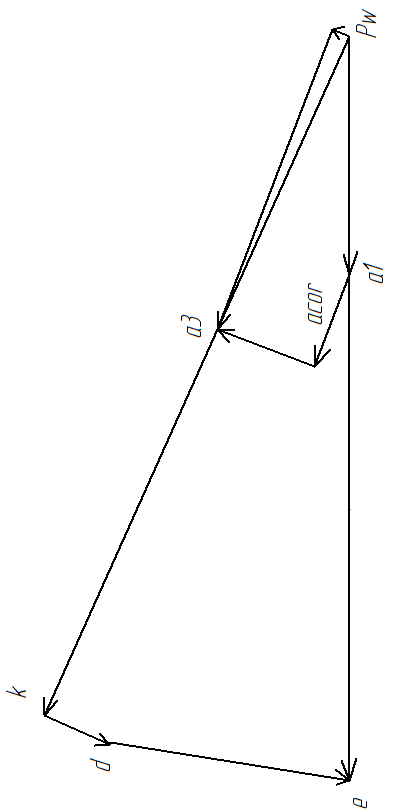
Построение плана ускорений при q=0
Формулы:
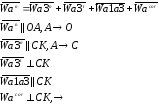

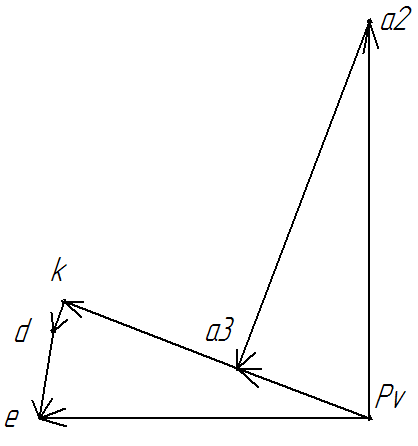
На рис. 4.12 изображен рисунок плана
ускорений для положения q=0.
Сам план в масштабе Kw=0.08
 можно найти в приложении.
можно найти в приложении.

Рис. 4.12
-
План скоростей и ускорений в положении q=1.855
На рис. 4.13 изображён механизм в положении q= 1.855.
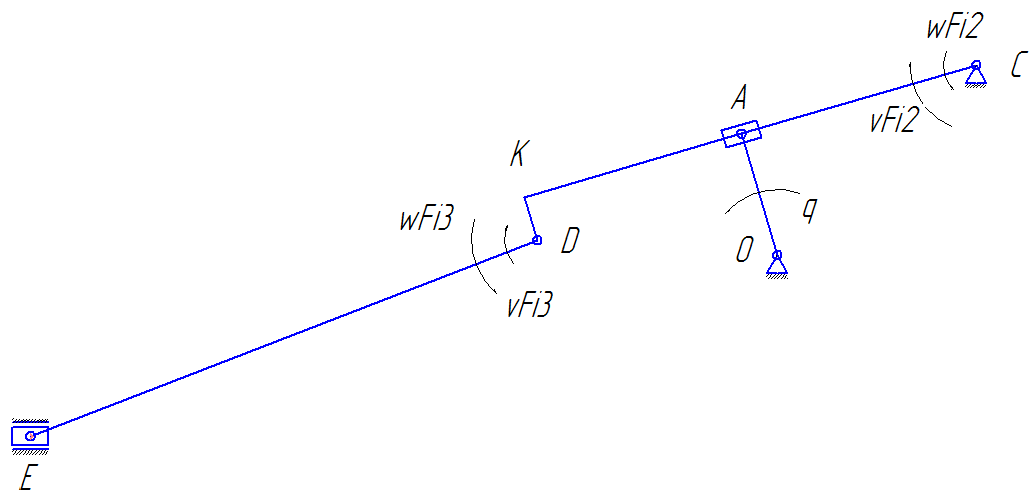
Рис. 4.13
-
Подготовка к построению планов скоростей и ускорений
при q= 1.855

-
Построение плана скоростей в положении q= 1.855
Формулы:


На рис. 4.14 изображен рисунок плана
скоростей для положения q=
1.855. Сам план в масштабе Kv=0.005
 можно найти в приложении.
можно найти в приложении.

Рис. 4.14
-
Построение плана ускорений в положении q= 1.855
Формулы:

На рис. 4.15 изображен рисунок плана
ускорений для положения q=
1.855. Сам план в масштабе Kw=0.05
 можно найти в приложении.
можно найти в приложении.
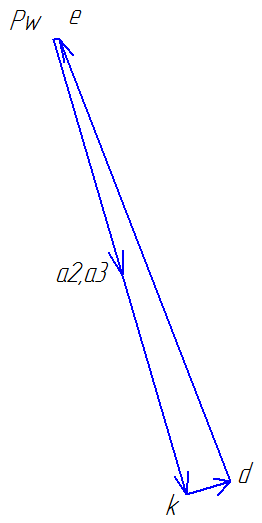
Рис. 4.15
На рис. 4.16 представлены графики зависимости координаты, аналогов скорости и ускорения ползуна Е, в зависимости от входной координаты q:
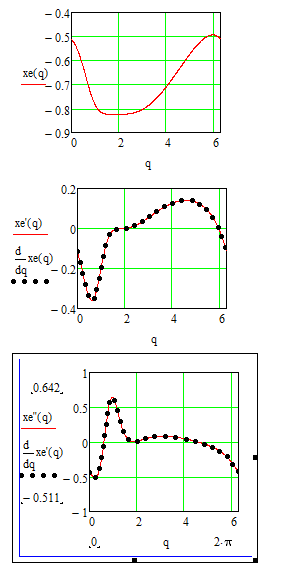
Рис. 4.16
-
Сравнение результатов и выводы
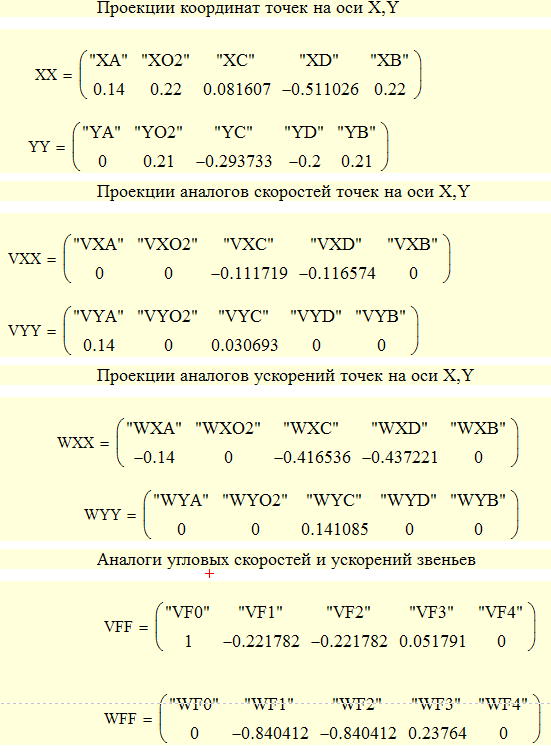
Представлена таблица с результатами, полученными тремя способами:
|
|
Стандартная программа |
Графический метод |
Протокол MathCad |
|
F1/q |
0 |
0 |
0 |
|
XA |
0.14 |
0.14 |
0.14 |
|
YA |
0 |
0 |
0 |
|
XC/XO2 |
0.22 |
0.22 |
0.22 |
|
YC/YO2 |
0.21 |
0.21 |
0.21 |
|
XE/XD |
-0.511026 |
-0.511 |
-0.511 |
|
YE/YD |
-0.2 |
-0.2 |
-0.2 |
|
XD/Xc |
0.081607 |
0.0816 |
0.082 |
|
YD/YC |
-0.293733 |
-0.2937 |
-0.294 |
|
VXA |
0 |
0 |
0 |
|
VYA |
0.14 |
0.14 |
0.14 |
|
V XC/XO2 |
0 |
0 |
0 |
|
V YC/YO2 |
0 |
0 |
0 |
|
V XE/XD |
-0.116574 |
-0.1168 |
-0.117 |
|
V YE/YD |
0 |
0 |
0 |
|
V XD/XC |
-0.111719 |
-0.1117 |
-0.112 |
|
V YD/YC |
0.030693 |
0.0307 |
0.031 |
|
WXA |
-0.14 |
-0.14 |
-0.14 |
|
WYA |
0 |
0 |
0 |
|
W XC/XO2 |
0 |
0 |
0 |
|
W YC/YO2 |
0 |
0 |
0 |
|
W XE/XD |
-0.437221 |
-0.4372 |
-0.437 |
|
W YE/YD |
0 |
0 |
0 |
|
W XD/XC |
-0.416536 |
-0.4165 |
-0.417 |
|
W YD/YC |
0.141085 |
0.1411 |
0.141 |
|
F0/q |
0 |
0 |
0 |
|
C F3/F1 |
1 |
1 |
1 |
|
S F3/F1 |
0 |
0 |
0 |
|
F2 |
249.1455 |
249.1455 |
249.146 |
|
C F2 |
-0.356 |
-0.356 |
-0.356 |
|
S F2 |
-0.934 |
-0.934 |
-0.934 |
|
F3 |
171.0123 |
171.0123 |
171.012 |
|
C F3 |
-0.988 |
-0.988 |
-0.988 |
|
S F3 |
0.156 |
0.156 |
0.156 |
|
V F2 |
-0.221782 |
-0.222 |
-0.222 |
|
V F3 |
-0.051791 |
0.052 |
0.052 |
|
W F2 |
-0.840412 |
-0.84 |
-0.84 |
|
W F3 |
0.23764 |
0.238 |
0.238 |
При помощи 3 разных способов мы получили достаточно близкие друг к другу результаты, чтобы совершенно точно утверждать, что все необходимые данные для вычислений найдены верно. Разница между вычислениями составляет 0.01-0.001, что является лишь недостатком округления.
-
Силовой анализ механизма
-
Постановка задачи
Главной задачей силового расчета является определение реакций структурных групп и движущего момента, прикладываемого к начальному звену. Все это необходимо для расчетов различных критериев прочности механизма.
-
Исходные данные
На рис. 4.17 представлены исходные данные для силового расчета:

Рис. 4.17 часть 1
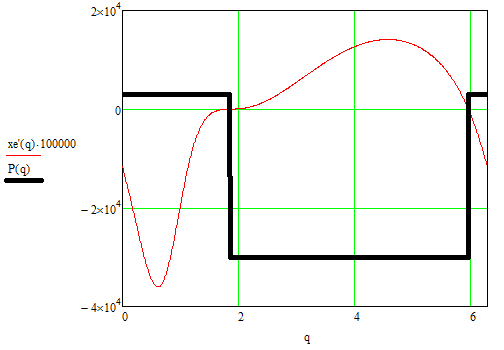
Рис. 2.17 часть 2
-
Расчет масс звеньев, сил тяжести и координат центров масс
На рис. 4.18 представлен расчет масс звеньев (кг):
![]()
Рис. 4.18
На рис. 4.19 представлен расчет сил тяжести звеньев (Н):
![]()
Рис. 4.19
На рис. 4.20 представлен расчет координат центров масс (м):
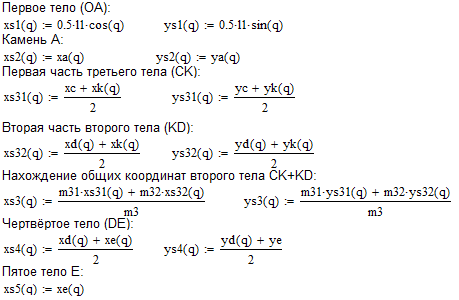
Рис. 4.20
-
Расчёт моментов инерции
На рис. 4.21 представлен расчет моментов
инерции ( ):
):
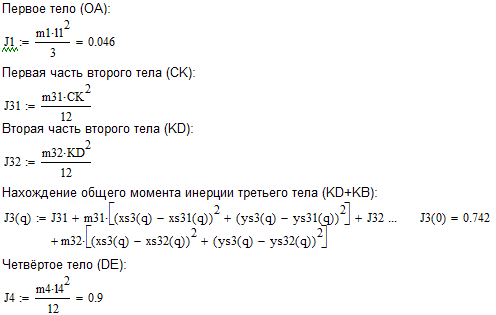
Рис. 4.21
-
Расчет сил инерции
На рис. 4.22 представлен расчет сил инерции (Н):
Рис. 4.22
-
Расчет моментов сил инерции
На рис. 4.23 представлен расчет моментов
сил инерции ( ):
):

Рис. 4.23
-
Составление уравнений кинетостатики
Для каждой структурной группы механизма, начиная с последней, записываем уравнения кинетостатики, приложив необходимые реакции.
На рис. 4.24 представлена пара звеньев 4-5, с нанесенными реакциями:

Рис. 4.24
Определение реакций в структурной группе 4 и 5 звеньев:
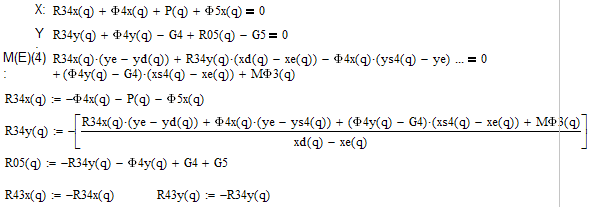
На рис. 4.25 представлена пара звеньев 2-3, с нанесенными реакциями:

Рис. 4.25
Определение реакций в структурной группе 2 и 3 звеньев:

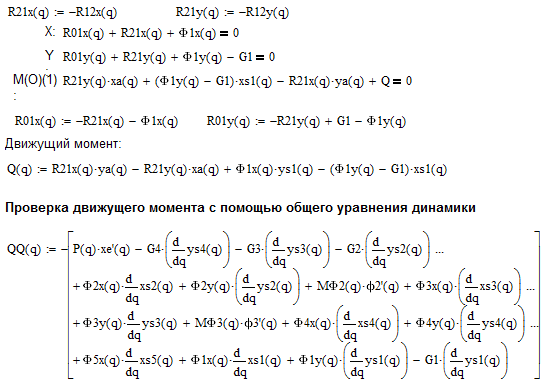
На рис. 4.26 представлена структурная группа 1, с нанесенными реакциями:

Рис. 4.26
Определение реакций в структурной группе 1-го звена:
-
График движущего момента
На рис. 4.27 представлен график движущего момента:

Рис. 4.27
-
Выводы
В ходе данной работы был проведен кинематический и силовой анализы двух механизмов: рычажного и кулисного. При помощи трех методов были выявлены координаты, аналоги скорости, аналоги ускорения точек и звеньев обоих механизмов: стандартной программы, графического способа и кинематического анализа. Все данные получились идентичными, что говорит о наличии нескольких способов решения данной задачи.
В силовом анализе были получены силы инерции, моменты инерции и силы тяжести. На основе полученных данных были выбраны оптимальные данные для поршня.
Приложения
приложение 1:
Приложение 2

Приложение 3:


Приложение 4

Приложение 5
Приложение 6
Приложение 7
Приложение 8:
Приложение 9

Приложение 10:

Приложение 11
Приложение 12
Приложение 13

Приложение 14