

ГЛАВА 5. ТРЕНИЕ В МЕХАНИЗМАХ
5.1. Трение в кинематических парах
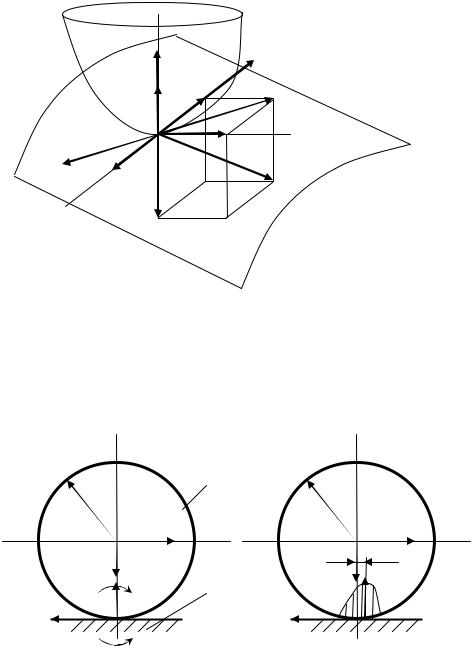
S – поверхность соприкосновения элементов кинематической пары.
Выделим на этой поверхности элементарную площадку dS в окрестности некоторой точки A.
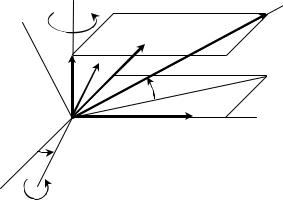
dF называется силой трения скольжения; момент dMк – моментом трения качения, момент dMв – моментом трения верчения.
Сила dF направлена противоположно вектору относительной скорости Vск Векторы dMк и dMв – противоположны по направлению соответственно касательной ωk и нормальной ωn составляющим вектора относительной угловой
скорости. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Закон Амонтона – Кулона. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
dF |
|
f |
|
dN |
|
, |
|
|
|
|
dMк |
|
k |
|
dN |
|
, |
|
|
|
|
dMВ |
|
|
|
kВ |
|
dN |
|
|
, |
|
|
|
|
|
|
|
|
(5.1) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
где f – безразмерный коэффициент трения скольжения, |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
k и kв – коэффициенты трения качения и верчения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
dF f |
|
dN |
|
|
|
vск |
|
|
,dMк |
k |
|
dN |
|
|
|
|
ωк |
|
|
,dMВ kВ |
|
dN |
|
|
|
|
ωn |
|
|
. |
(5.2) |
||||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
vск |
|
|
|
|
к |
|
|
|
|
n |
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Суммарная сила трения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vск |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
F dF f |
|
dN |
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.3) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vск |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
dN |
|
dS |
dMв |
ωк |
|
A |
|
dF |
|
|
|
Vск |
|
|
|
|
S dMк |
|
ωn |
где S – поверхность соприкосновения. Для того чтобы воспользоваться этой формулой, нужно знать закон распределения нормальных реакций по поверхности S.
Коэффициенты трения скольжения, верчения и качения определяются экспериментально; они зависят от многих факторов.
Рис. 5.1
142
Если скорость скольжения в точке контакта и относительная угловая ско- |
||||||||
|
z |
|
|
рость равны нулю, суммар- |
||||
|
|
|
ные силы и моменты сил |
|||||
|
|
N |
F |
трения |
в |
кинематической |
||
|
|
паре могут быть определены |
||||||
|
|
|
|
|||||
|
Mв |
ωτx |
ωτ |
из |
условий |
равновесия |
||
|
|
|
звеньев. |
|
|
|
||
|
A |
|
|
|
|
|
||
|
|
y |
|
F = P, Mк = Pּr. (5.4) |
||||
Mк |
|
|
|
|||||
|
|
ωτy |
|
|||||
|
Vск |
|
ω |
|
Нарушение |
состояния |
||
х |
ωn |
|
|
покоя |
|
|
(качение): |
|
|
|
P k N, |
|
|
(5.5) |
|||
|
|
|
|
|
||||
|
|
|
|
|
|
|||
|
|
|
|
|
r |
|
|
|
|
Рис. 5.3 |
|
где k – коэффициент трения |
|||||
|
|
качения |
|
|
|
|||
|
|
|
|
|
|
|
||
Скольжение: |
|
|
P fn N , |
|
|
(5.6) |
||
где fn – коэффициент трения покоя, обычно несколько превышающий ве- |
||||||||
личину коэффициента трения скольжения f. |
|
|
|
|
|
|||
|
a) |
|
|
б) |
|
|
|
|
1 |
|
|
|
r |
0 |
P |
r |
P |
|
|
0 |
|||
|
G |
|
|
|
k |
|
Pּr |
2 |
G |
N |
|
|
|
||||
|
|
N |
|
|
|
F |
|
MK |
F |
|
|
|
|
|
|
||
Рис. 5.2
для высшей кинематической пары первого класса .
5.2. Модели кинематических пар с трением
Для того, чтобы задача силового анализа осталась разрешимой, необходимо ввести дополнительные условия, количество которых равно числу неизвестных.
Проще всего такие условия вводятся
Все компоненты реакции выражаются через нормальную силу N.
143
R |
F f |
|
N |
|
|
|
vск |
, R |
y |
0; R |
z |
N, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
x |
x |
|
|
|
|
|
|
|
vск |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.7) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
M R |
M |
|
k |
N |
|
x |
, M R |
M |
|
k |
N |
|
|
y |
|
, M R |
M |
|
k |
|
N |
|
|
n |
|
, |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
Ax |
|
кx |
|
|
|
|
|
|
|
|
|
|
Ay |
|
|
|
к y |
|
|
|
|
|
|
Az |
|
B |
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
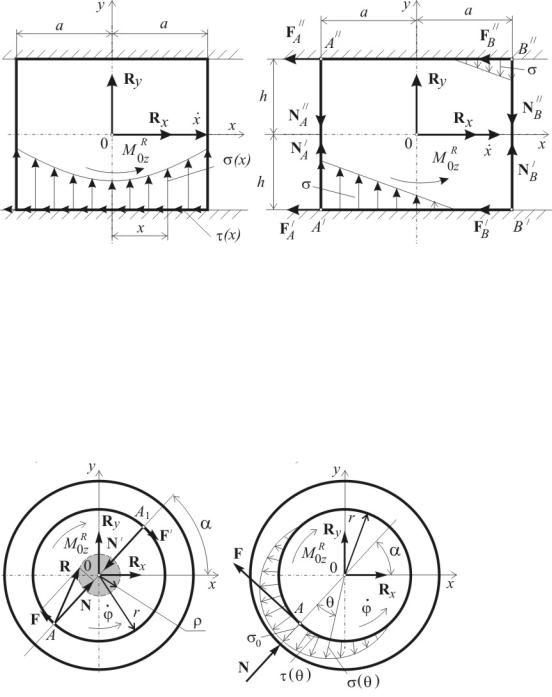
а) Поступательная пара в плоском механизме.
|
Без трения |
Одноточечный контакт |
|
Двухточечный контакт |
|
||||||||||
Rx |
0 |
f | R |
y |
| sign x |
|
|
f (| NA | |
|
| NB |
|
|
|
|||
|
|
|
|
|
|
|
|)sign x |
|
|||||||
Ry |
Ry |
|
Ry |
|
|
|
|
NA + NB |
|
|
|
||||
R |
R |
R |
e fR |
hsign x |
(NB |
|
NA )a |
|
fh(NB |
|
|
|
|||
M0z |
M0 z |
y |
|
|
y |
|
|
|
|
NA )sign x |
|||||
б) Вращательная пара в плоском механизме. |
|
|
|
|
|
|
|
||||||||
|
|
a) |
|
|
|
|
|
б) |
|
|
|
|
|
|
|
144

|
|
|
|
|
Rx N cos fN sin ; Ry N sin fN cos , |
(5.14) |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
R |
|
|
|
N |
|
sign fr(1 f |
2 |
) |
|
1 |
2 |
|
2 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
M0 z fr |
|
|
|
|
Rx |
Ry sign . |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рассмотрим закон распределения |
( ) 0 cos .( |
). |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
Силы трения также являются распределенными |
|
f |
|
|
|
|
. |
|
||||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N 2 |
( )rd cos 0r 2 |
cos2 d |
0r, |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
F 2 |
f ( )rd cos |
f 0r, M |
0Rz 2 |
r2d 2 f 0r2. |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||||
Отсюда получаем |
Rx N cos fN sin , Ry |
N sin fN cos , |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
(5.15) |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M0 z |
|
|
|
fr |
N |
sign . |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
Без трения |
|
Пара с зазором (изношенная) |
|
Приработавшаяся цапфа |
|||||||||||||||||||||||||||||||
Rx |
|
Rx |
|
|
|
|
|
|
Ncosα – fNsinα |
|
|
|
|
|
|
|
|
Ncosα – fNsinα |
||||||||||||||||||
Ry |
|
Ry |
|
|
|
|
|
|
Nsinα + fNcosα |
|
|
|
|
|
|
|
|
Nsinα + fNcosα |
||||||||||||||||||
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
fr | N | sign |
|
|
|
|
|
|
|
|
|
4 |
fr | N | sign |
|||||||||||
M0z |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
в) |
Червячное |
зацепление. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
a) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
F′ |
F |
N |
|
|
|
|
|
|
|
z** |
|
|
|
z, z* |
|
|
|
|
|
|
|
|
|||||||||||||
|
N′ |
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
B′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
N |
|
|
y** |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
* |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
||
|
|
|
|
|
γ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
γ |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x*, x**
x
145
Рис. 5.6
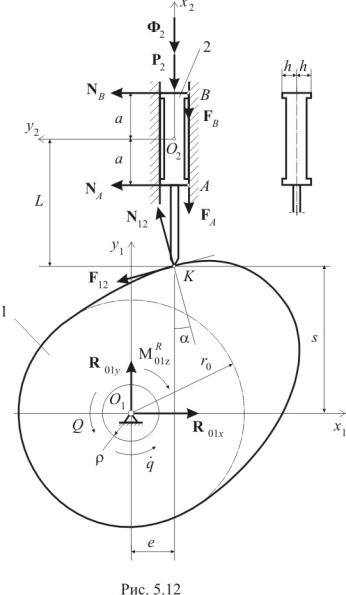
Угол α – угол профиля исходного контура (при α=0 виток червяка становится прямобочным).
Угол γ – угол подъема винтовой линии червяка (при γ = 0 винтовая линия обращается в кольцевую).
S = Nּcosαּcosγ – Fּsinγ =N(cosαּcosγ – f ּsignNּsinγּsign q ),
P = Nּcosαּsinγ + Fּcosγ =N(cosαּsinγ + fּsignNּcosγּsign q ), (5.16) T = Nּsinα.
z, z* |
|
|
|
|
N y** |
|
z** |
|
P |
|
|
||
|
|
|
|
|
||
|
|
|
|
|
|
|
T F |
|
α |
|
|
|
y* |
|
|
|
|
|||
B |
|
S |
|
y |
||
|
|
|
||||
|
|
|
||||
γ |
|
|
|
|||
|
|
|
|
|
||
x*, x** |
|
|
|
|
|
|
x |
Рис. 5.7 |
|
|
|
|
|
|
|
|
|
|
||
S – осевая сила на червяке (окружная сила на червячном колесе);
P – окружная сила на червяке (осевая на червячном колесе);
Т – радиальная сила.
5.3. Силовой расчет механизмов с трением
Первый метод (метод последовательных приближений).
В первом приближении связи считают идеальными, силами трения пренебрегают.
По найденным реакциям находят силы трения и повторяют силовой расчет, считая силы трения известными.
Вычисляют следующие приближения до тех пор, пока разница между значениями сил реакций, найденных в последующем и предыдущем приближениях, не окажется меньше допустимого значения.
146

Пример. Будем считать массу шатуна 2 пренебрежимо малой. При сделанном допущении ползун 3 становится статически определимым.
R12 |
|
a) |
|
|
|
|
|
|
|
|
|
|
A |
R03 |
|||
|
2 |
B |
3Р Ф3 |
||
|
|
α |
|||
|
|
|
|
|
|
|
|
|
|
M 03( R ) |
|
|
|
|
|
||
|
|
|
G3 |
||
|
|
|
б) |
|
|
|
|
|
|
в) |
|
|
R23 |
R03 |
3 |
|
R23 |
R03 |
3 |
||||||
α |
|
B |
|
Р Ф3 |
|
α |
|
B |
|
Р Ф3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
||
M03( R ) |
G3 |
|
M03( R ) |
G3 |
||||||||
Рис. 5.8
Первое приближение. Полагая силы трения равными нулю, запишем урав- в) нения кинетостатики для ползуна:
h
R23 |
R03 |
3 |
α  B
B  Р Ф3
Р Ф3
 F
F
M ( R )
03 G3
R23(1) cos P Ф3 0,
R(1) |
G |
R(1) sin 0, |
(5.17) |
03 |
3 |
23 |
|
M03(R)(1) 0.
Здесь α – угол наклона звена 2 (и силы реакции R23 ) к линии перемещения ползуна.
Реакции в первом приближении:
R(1) |
|
P Ф3 |
, R(1) |
G |
(P Ф |
)tg , |
M (R)(1) |
0. |
(5.18) |
|
|||||||||
23 |
|
cos |
03 |
3 |
3 |
|
03 |
|
|
|
|
|
|
|
|
|
|
|
|
Сила трения F, действующую на ползун со стороны стойки: |
|
||||||||
|
|
F fR03 |
fG3 f (P Ф3 )tg , |
|
(5.19) |
||||
где f – коэффициент трения в поступательной паре.
Второе приближение.
Составим уравнения кинетостатики для ползуна, полагая, что сила трения F
в) |
известна. |
|
|
|
|
|
R(2) cos P Ф |
fG |
f (P Ф |
)tg 0, |
|||
|
||||||
|
23 |
3 |
3 |
3 |
|
|
R23 R03
 α
α  B
B
h
M03( R )
|
|
R(2) sin G |
R(2) |
0, |
|
|
|
|
3 |
23 |
3 |
03 |
|
|
|
|
|
M (R)(2) |
fh G P Ф |
|
|
0. |
||||
|
|
3 |
||||||
|
Р Ф3 |
03 |
|
3 |
|
|
|
|
|
(5.20) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
F
G3
147

Отсюда найдем силы реакции во втором приближении:
R(2) |
|
P Ф3 |
|
|
fG3 |
|
f (P Ф3 )tg |
, |
|
|
|
|||
|
|
|
|
|
|
|
||||||||
23 |
|
cos |
|
cos |
|
|
|
cos |
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||||
R(2) |
G (P Ф |
)tg fG tg f (P Ф |
)tg2 , |
(5.21) |
||||||||||
03 |
3 |
|
|
3 |
|
|
|
|
3 |
|
3 |
|
|
|
M (R)(2) fh |
G |
P Ф |
3 |
. |
|
|
|
|||||||
03 |
|
|
|
3 |
|
|
|
|
|
|
|
|
||
Из сравнения выражений (5.21) и (5.18) видно, что значения всех сил реакций изменились:
R(2) |
R(1) |
(1 ftg ) |
fG3 |
, |
R(2) |
R(1) |
(1 ftg ), |
|
cos |
||||||||
23 |
23 |
|
|
03 |
03 |
|
а момент M03(R) стал ненулевым.
Полагая, что R03 R03(2) , можно найти силу трения F fR03 и, считая ее известной, найти следующее, третье приближение, и т.д.
Второй метод.
Система уравнений кинетостатики для ползуна:
в)
|
R23 |
R03 |
3 |
|||
|
α |
|
B |
|
Р Ф3 |
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
h |
|
|
|
|
||
|
M03( R ) |
G3 |
||||
–R23cosα + (P + Ф3) + fR03signR03 = 0,
R23sinα + R03 – G3 = 0, (5.25)
–R03a + fR03h = 0.
Здесь а – расстояние от оси шарнира В до линии действия силы реакции R03 ,
Из второго уравнения (5.25) выразим R23:
R23 G3 R03 .
sin
Подставляя R23 в первое уравнение : |
|
|
|
||||
|
|
|
R G3ctg (P Ф3 ) |
(5.26) |
|||
|
|
03 |
ctg f |
signR03 |
|
||
|
|
|
|
|
|||
|
|
|
|
|
|||
|
«малое» трение: f < ctgα |
«большое» трение: f > ctgα |
|||||
G3ctgα – (P + Ф3) < |
R |
G3ctg (P Ф3 ) |
0 |
|
решения не существует |
||
0 |
03 |
|
ctg f |
|
|
режим самоторможения |
|
|
|
|
|
||||
|
|
тяговый режим |
|
|
|||
|
|
|
|
|
|||
G3ctgα – (P + Ф3) > |
R |
G3ctg (P Ф3 ) |
0 |
|
два решения |
||
0 |
03 |
|
ctg f |
|
|
|
|
|
|
|
|
|
|||
148
|
инверсный тяговый |
R |
G3ctg (P Ф3 ) 0 |
||
|
режим. |
03 |
|
ctg f |
|
|
|
|
G3ctg (P Ф3 ) |
|
|
|
|
R |
|
0 |
|
|
|
|
|||
|
|
03 |
|
ctg f |
|
|
|
|
|
||
|
|
режим оттормаживания |
|||
Расчет плоского кулачкового механизма. |
|
|
|
|
|
Составим уравнения кинетостатики для толкателя. |
|
|
|
||
N12 (cos f1 sign N12 sin ) f2 (NA sign NA NB sign NB ) P2 Ф2 , |
|||||
N12 (sin f1 sign N12 cos ) NA NB 0, |
|
(5.27) |
|||
N12 (sin f1 sign N12 cos )L (a f2h)NB (a f2h)NA 0. |
|||||
α и f1 – угол давления и коэффициент трения в высшей кинематической паре К,
f2 – коэффициент трения в поступательной паре,
P2 – рабочая нагрузка, Ф2 – сила инерции толкателя,
а, h, L – геометрические параметры.
Упростим уравнения кинетостатики. Сложим уравнения 2 и 3:
N A NB L a f2h NB a f2h N A 0
или
N A L a f2h NB L a f2h 0
При L a f2h
N A 1, signN A signNB , NB
signN A sign N A NB
Введем обозначения:
149

P P2 2 ,
N N A NB L af2h N A NB
sign N A NB signN A signNB ,
N signN12 , N N12 .
Перепишем уравнения кинетостатики для толкателя.
N cos f N sin f |
N P |
|
|
|
|
|
|
||||||
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
N sin f N cos |
|
a |
N 0 |
|
|
|
|
|
|
||||
L f2h |
|
|
|
|
|
|
|||||||
1 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
1. Трение только в высшей КП ( f2 0 ) |
|
|
|
|
|
|
|||||||
|
|
|
|
N |
P |
|
|
|
|
|
|
||
|
|
|
|
cos f N sin |
|
|
|||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
«малое» трение: |
|
|
«большое» трение: |
|||||||
|
|
|
cos f1 sin |
|
|
cos f1 sin |
|||||||
P 0 |
|
N |
|
|
P |
0 |
|
решения не существует |
|||||
|
|
cos f sin |
|
|
|
|
|
|
|
||||
|
|
|
|
|
1 |
|
|
|
|
режим самоторможения |
|||
|
|
тяговый режим N 1 |
|
||||||||||
P 0 |
|
N |
|
|
P |
0 |
|
|
два решения |
||||
|
|
|
|
|
|
P |
|
|
|||||
|
|
cos f1 sin |
|
|
|
||||||||
|
|
|
|
|
|
|
N cos f |
sin 0 |
|||||
|
|
|
инверсный тяговый |
|
|||||||||
|
|
|
1 |
|
|
||||||||
|
|
|
режим. N 1 |
|
|
N |
P |
|
0 |
||||
|
|
|
|
|
|
|
|
|
|
cos f |
sin |
||
|
|
|
|
|
|
|
|
|
1 |
|
|
||
|
|
|
|
|
|
|
|
|
режим оттормаживания |
||||
|
|
|
|
|
|
|
|
|
|
|
N 1 |
|
|
2. |
Трение в высшей и поступательной КП ( f2 f1 |
f ) |
|
|
|||||||||||||||
N cos f N sin f N L fh |
sin f N cos P |
|
|
||||||||||||||||
|
|
|
|
|
|
N L fh |
a |
|
|
|
|
N L |
fh |
|
|||||
|
|
2 |
|
|
|
|
N |
|
|
|
|
||||||||
N cos 1 f |
|
|
|
|
|
|
|
f |
|
sin 1 |
|
|
|
|
|
|
|
P |
|
|
|
|
a |
|
|
|
|
a |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
150

Обозначим C 1 f |
2 |
|
|
|
N L |
fh |
, S 1 |
|
|
|
N L fh |
. |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
a |
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
C cos |
Sf N sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
N при |
sin f N cos 0 , cos |
N |
sin , |
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
C 1 f 2 |
L fh |
, S 1 |
L fh |
. |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
«малое» трение: |
|
|
|
|
|
|
|
|
|
|
|
|
«большое» трение: |
|
|
|
|||||||||||||||||||||
|
|
|
C1 cos S1 f sin |
|
|
|
|
|
|
|
C1 cos S1 f sin |
|
|
|
|||||||||||||||||||||||||||
P 0 |
N |
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
0 |
|
|
|
|
решения не существует |
||||||||||||||||||||
|
|
|
C |
cos |
S f sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
режим самоторможения |
|||||||||||||||||
|
|
|
тяговый режим N 1 |
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
P 0 |
N |
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
два решения |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
||||||||||||||
|
|
|
C1 cos S1 f sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
N C |
cos |
S f sin |
0 |
||||||||||||||||||||||||||
|
|
|
инверсный тяговый режим. |
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
N 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
P |
|
|
0 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
cos |
S f sin |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
режим оттормаживания |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N 1 |
|
|
|
||
|
N при sin f N cos 0 , cos |
N |
sin , |
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
C2 1 f |
2 L fh |
, S2 |
1 |
|
L fh |
0 . |
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
a |
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
«малое» трение: |
|
|
|
|
|
|
|
|
|
|
|
|
«большое» трение: |
|
|
|
|||||||||||||||||||||
|
|
|
C2 cos S2 f sin |
|
|
|
|
|
|
C2 cos S2 f sin |
|||||||||||||||||||||||||||||||
P 0 |
|
N |
|
|
|
|
|
|
P |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
два решения |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|||||||||||||||||
|
|
|
C2 cos S2 f sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
N C2 cos S2 f sin 0 |
||||||||||||||||||||||||||||||||
|
|
|
тяговый режим N 1 |
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
P |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C2 cos S2 f sin |
|||||||||||||||
151