

2.6. Механизмы с линейной функцией положения |
|
|
Функции положения: |
1q , |
|
b |
(3.39) |
|
|
i |
|
где φ и q – соответственно выходная и входная координаты, b, i – постоянные. Механизмы с линейной функцией положения обычно называют передачами.
|
q |
|
|
|
|
i . |
(3.40) |
|
i–передаточное отношение.
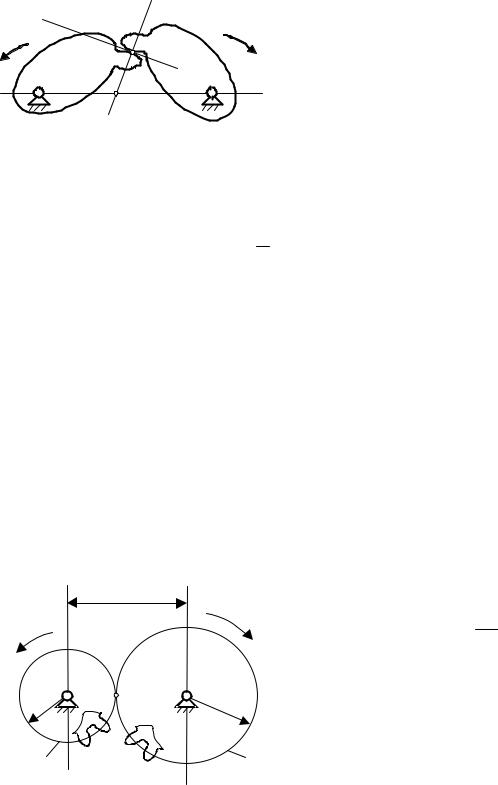
1.Фрикционные – передачи, в которых движение передается за счет сил трения между звеньями (frictio по-латыни – трение).
|
|
a |
|
VK1 VK 2 |
(3.41) |
|
|
q |
VK = VK1= VK2 |
|
|
|
(3.41 ) |
|
|
|
r1q |
r2 . |
||
|
|
|
|
|
|
|
P |
|
O1 |
O2 |
|
|
(3.42) |
|
i q r2 . |
|||||
|
|
K |
|
|
r1 |
|
|
|
|
|
|
|
|
|
|
r1 |
r2 |
Точка К – мгновенный центр |
||
|
1 |
|
2 |
скоростей в относительном дви- |
||
|
|
жении. |
|
|
||
|
|
|
|
r1, r2 –подвижные центроиды |
||
|
|
Рис. 3.20 |
|
(катятся друг по другу без сколь- |
||
|
|
|
|
жения). |
|
|
Фрикционные передачи не передают большие усилия. |
|
|
||||
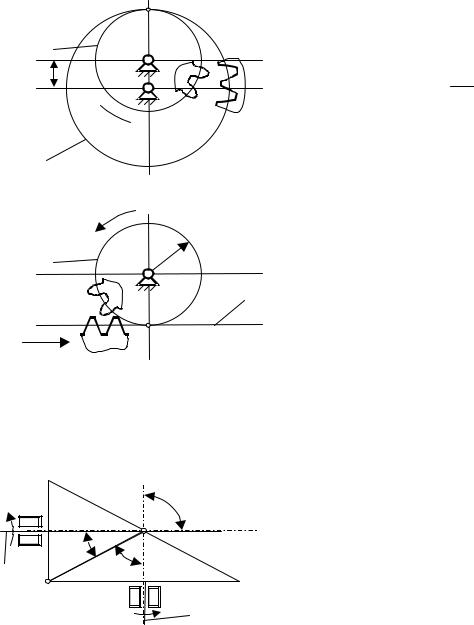
2. Ременные передачи. |
1 |
– ведущий шкив 1, |
|
|
|
|||||||
|
|
a |
|
|
|
|
||||||
|
|
|
2 |
– ведомый шкив, |
|
|
|
|||||
|
q |
|
3 |
– ремень. |
|
|
|
|||||
|
2 |
|
|
|
||||||||
|
|
|
|
|
|
|||||||
|
O1 |
O2 |
Соотношение для |
угловых скоростей |
||||||||
r1 |
|
|
|
|||||||||
|
|
r2 |
|
|
|
|
|
|
|
шкивов: |
||
|
|
|
ведущего q и ведомого |
|
||||||||
1 |
3 |
|
i |
q |
r2 . |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
Рис. 3.21 |
|
|
|
r1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
Межосевое расстояние а=О1О2 больше, чем во фрикционных. Направление вращение у ведущего и ведомого колес совпадает.
78
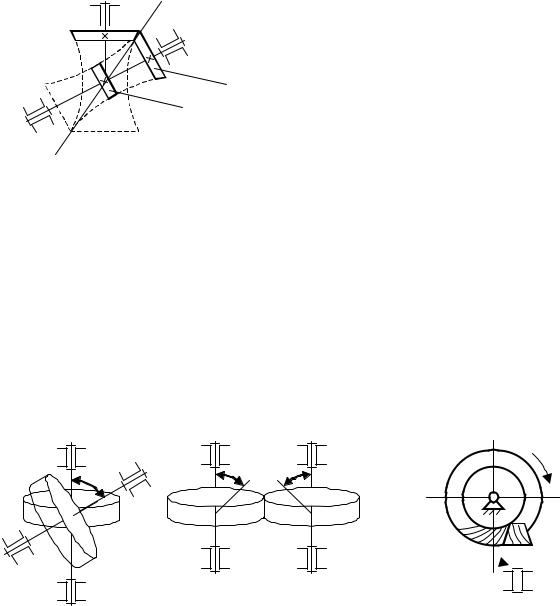
3. Зубчатые передачи. |
|
|
|
|
|
|
|||
|
|
|
n |
|
|
|
Р – полюсом зацепления (мгновен- |
||
|
|
|
|
|
|
ный центр скоростей в относительном |
|||
q |
|
|
|
|
|
||||
|
|
|
|
|
движении) |
|
|
||
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O1 |
|
O |
|
|
Относительная скорость в точке Р |
||
|
|
|
2 |
|
|
||||
|
|
|
n P |
|
|
|
равна нулю, т.е. VP1 = VP2: |
|
|
|
|
|
|
|
|
q 1P 2 P . |
(3.43) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.22 |
|
|
|
Передаточное отношение i12: |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
i |
|
|
2 P . |
|
(3.44) |
|
|
|
|
q |
|
||||
|
|
|
|
12 |
|
|
1P |
|
|
|
|
|
|
|
|
|
|
|
|
Иными словами, нормаль, проведенная в точке контакта к сопряженным профилям, делит межосевое расстояние в отношении, обратно пропорциональном отношению угловых скоростей. Это – основная теорема зацепления.
При i12=const O1P=const, O1P=const
В этом случае центроидами в относительном движении являются начальные окружности ( rw1,rw2 ).
Передаточное отношение для внешнего зацепления:
|
а) |
|
|
aw |
|
|
|
|
q |
|
|
|
|
|
O1 |
P |
O2 |
|
|
|
rw1 |
|
rw2 |
Ц1 |
|
Ц2 |
|
Рис. 3.23 |
|
|
|
|
|
rw2 |
|
z2 |
|
|
i |
|
q |
|
|
. |
(3.44′) |
||
|
|
|
||||||
12 |
|
|
rw1 |
|
z1 |
|
||
|
|
|
|
|
|
|||
rw2 i12 rw1, rw1 rw2 i12
Начальное межосевое расстояние
|
аw = rw1 + rw2. |
|
(3.45) |
|||||||
r |
|
|
|
aw |
,r |
|
awi12 . |
(3.46) |
||
1 |
i |
|||||||||
w1 |
|
w2 |
|
1 |
i |
|
||||
|
|
|
|
12 |
|
|
|
12 |
|
|
79
Передаточное отношение для внутреннего зацепления:
|
б) |
|
P |
Ц1 |
O |
aw |
O2 |
 q
q 
Ц2
|
|
в) |
|
q |
r1 |
|
|
|
Ц1 |
|
O1 |
P
V
Рис. 3.23
|
|
|
|
rw2 |
|
z2 |
|
|
i |
|
q |
|
|
. |
(3.44″) |
||
|
|
|
||||||
12 |
|
|
rw1 |
|
z1 |
|
||
|
|
|
|
|
|
|||
rw2 i12 rw1 , rw1 rw2 i12
Начальное межосевое расстояние
|
аw = rw2 – rw1. |
|
|
|
|
(3.47) |
||||||||
|
r |
|
|
aw |
|
,r |
|
awi12 |
. |
(3.48) |
||||
|
|
|
|
|
|
|||||||||
|
w1 |
|
|
i |
1 |
|
w2 |
|
i |
1 |
|
|||
|
|
|
|
12 |
|
|
|
|
|
12 |
|
|
||
Ц2 |
Передаточное отношение для зубчато- |
|||||||||||||
|
реечной передачи: |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
i |
|
|
q |
|
|
. |
|
|
|
|
(3.49) |
||
|
|
|
|
|
|
|
|
|
||||||
|
12 |
|
V |
|
r1 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||||
Конические колеса – передача вращения между валами с пересекающимися осями
|
q |
|
|
|
|
|
O |
|
|
|
|
|
|
|
I |
rw1 |
|
|
|
|
|
|||
|
|
|
|
|
|
P |
rw2 |
|
II |
|
|
|
|
|
|
|
|
Рис. 3.24 |
|
Мгновенная ось вращения в относитель-
ном движении (OP) – геометрическое место точек тел, имеющих в данный момент нулевую относительную скорость.
Подвижные аксоиды (начальные конусы)
– поверхности, образованные мгновенной осью в локальной системе координат, связанной со звеном 1 или 2).
rw1 |
q rw2 |
. |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||
Передаточное отношение : |
q |
rw2 |
z2 . |
|
|
|
||||||
i |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rw1 |
|
z1 |
|
|
|
|||
|
|
|
|
|
|
|
|
sin 2 |
||||
Поскольку rw1 = OPsin 1, rw2 = OPsin 2 , то |
i12 |
|
||||||||||
sin 1 |
||||||||||||
В ортогональных передачах (угол между осями = 900): i12 = ctg 1 = tg 2 .
(3.50)
(3.51)
(3.52)
(3.53)
80
Гиперболоидные передачи (передача вращения между валами, оси которых мгновенная скрещиваются).
винтовая ось
|
|
|
|
|
|
|
|
|
Нет ни мгновенного центра скоро- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стей в относительном движении, ни |
|
|
|
|
|
|
|
|
2 |
мгновенной оси. |
|
|
|
|
|
|
|
|
Относительное движение можно |
|
|
|
|
|
1 |
|||||
|
|
|
|
|
|||||
|
|
|
|
|
представить как поворот вокруг некото- |
||||
|
|
|
|
|
|
|
|
|
рой оси и скольжение вдоль нее (мгно- |
|
|
|
|
|
|
|
|
|
венная винтовая ось). |
|
|
|
|
|
|
|
|
|
|
Рис. 3.25 |
|
Винтовые аксоиды относительного |
|||||||
|
движения –однополостные гиперболои- |
||||||||
ды вращения.
Упрощение:
части 1 гиперболоидов заменяют цилиндрическими поверхностями и получают винтовые зубчатые передачи;
части 2 заменяют коническими поверхностями и получают гипоидные зубчатые передачи.
Винтовые зубчатые передачи |
гипоидные зубчатые передачи . |
|
а) |
б) |
|
|
w1 – w1 |
|
|
||
 q
q
Рис. 3.26 |
Рис. 3.27 |
Угол между скрещивающимися осями |
w1 w2 . |
Если 1 = – 2, то = 0, и оси колес оказываются параллельны. Нормальные составляющие скоростей точек контакта первого и второго ко-
леса должны быть равными, то есть Vn1=Vn2, то V1 cos w1=V2 cos w2. |
|
|||||||
Учитывая, что V1= qrw1 , |
а V2 |
rw2 , передаточное отношение винтовой пе- |
||||||
|
|
|
|
|
|
|
|
|
редачи: |
|
|
|
|
|
|
|
|
i |
|
q |
|
rw2 cos w2 |
|
z2 |
. |
(3.54) |
|
|
|||||||
12 |
|
rw1 cos w1 |
|
z1 |
|
|||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
81 |
Червячная передача - частный случай гиперболоидной зубчатой передачи . |
|
||||||||||||
|
|
а) |
|
|
|
|
Угол |
скрещивания |
осей |
в |
|||
|
|
|
|
|
|
большинстве случаев равен 900. |
|
||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
1 – червяк (z1 число заходов), |
||||||
|
|
|
|
|
|
|
2 – червячное колесо (z2 ). |
|
|||||
q |
|
K |
1 |
|
|
|
tg px1 z1 , |
|
|
|
|||
|
|
0 |
|
|
|
|
|
(3.55) |
|||||
|
|
|
2 |
|
|
|
|
|
d1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
в) |
|
|
VK 2 |
tg . |
|
|
(3.56) |
|||
Развертка |
|
|
K1 |
|
VK1 |
|
|
|
|
|
|
||
винтовой |
|
|
|
|
|
|
|
|
|
|
|
||
VK1K 2 |
|
|
|
|
|
|
|
|
|
|
|||
линии |
|
|
V |
|
|
|
|
|
|
|
|||
|
|
πd1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K1 |
Передаточное |
|
отношение |
||||
|
|
|
PV |
|
|
||||||||
|
|
|
K2 |
|
|
червячной передачи: |
|
|
|||||
p |
|
z |
|
VK 2 |
|
i12 |
r2 |
tg |
z2 |
. |
(3.57) |
||
x1 |
|
|
|
||||||||||
|
1 |
|
|
|
|
r1 |
z1 |
||||||
|
|
Рис. 3.28 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
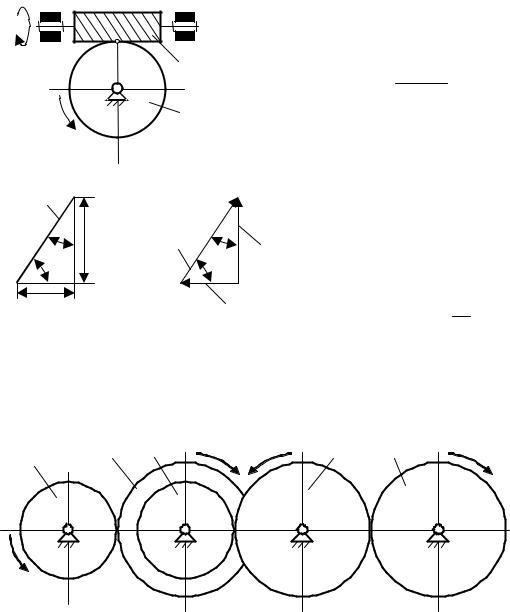
4. Ряды зубчатых колес. Передаточное отношение обратно пропорцио- |
|||||||||||||
нально отношению радиусов начальных окружностей колес. |
|
|
|
|
|||||||||
z1 |
z2 |
|
ω2 |
ω3 |
z3 |
z4 |
|
|
|
|
|||||
z2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
O1 |
|
O2 |
|
O3 |
|
O4 |
|
|
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
|
|
|
Рис. 3.29 |
|
|
|
|
В инженерной практике по конструктивным соображениям это отношение не превышает 5 … 7. Для получения большего передаточного отношения зубчатые колеса составляют в ряды зубчатых колес).
Передаточное отношение такого ряда :
|
q |
|
q |
|
ω2 |
|
ω3 |
|
|
rw2 |
|
|
|
|
|
|
|
|
rw2 rw4 |
|
z2 |
z4 |
|
||
i14 |
|
|
|
i12 i2 3 i34 |
|
|
|
rw3 |
|
|
rw4 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
||
|
ω2 |
ω3 |
|
rw1 |
|
rw1 |
rw2 |
z1 |
zw2 |
||||||||||||||||
|
|
|
|
|
|
|
|
rw2 |
|
rw3 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rw3 – паразитное колесо .
82
5. Коробки передач.
Рис. 3.30
а) два фиксированных значения передаточного отношения:
(iI-II)1 = z2 / z1, (iI-II)2 = z4 / z3.
б) пять значений передаточного отношения:
i |
|
z13 |
|
z6 |
, i |
|
|
z13 |
|
z4 |
, i |
|
|
z12 |
|
z6 |
, i |
|
|
z12 |
|
z4 |
, i |
|
|
z13 |
|
z8 |
|
z7 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
z1 |
z9 |
|
|||||||||||||||||
1 |
|
z1 |
z10 |
2 |
|
z1 |
z11 |
3 |
|
z3 |
z10 |
4 |
|
z3 |
z11 |
ð |
|
|
|
z8 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
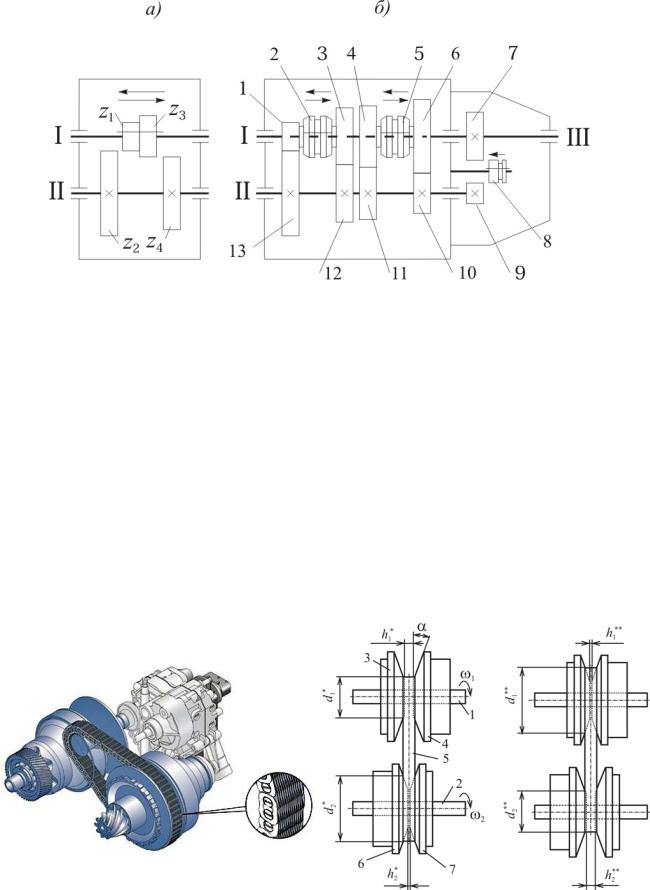
6. Вариаторы. Плавное изменение передаточного отношения. осуществляют с помощью передачи, называемой вариатором.
Для примера рассмотрим вариаторы CVT (Continuously Variable Transmission), применяемые в автомобилестроении.
а) |
б) |
в) |
Рис. 3.31
83
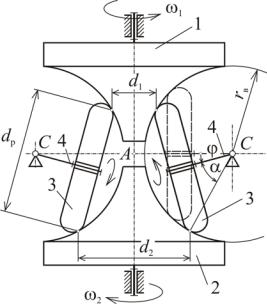
Рис. 3.32
1, ω1 > ω2 (понижающая передача).
В торовом вариаторе Toroidal CVT вместо гибкого звена используются ролики.
Передаточное отношение вариатора i12:
i |
|
ω1 |
d2 |
( ) |
|
AC rв cos(α ) |
i |
( ) |
||
|
( ) |
|||||||||
12 |
|
ω |
2 |
d |
|
AC r |
cos(α ) |
12 |
|
|
|
|
|
1 |
|
|
в |
|
|
|
|
где rв – радиус огибающей профилей звеньев 1 и 2; φ – угол отклонения звена 4 от нейтрального положения; α – параметр ва-
риатора: sin α = rр / rв ; rр = dр / 2 – радиус ролика 3.
В нейтральном положении φ = 0, d1 = d2, i12 = 1, ω1 = ω2.
При φ > 0 (как на рис. 3.32) d1 < d2, i12 >
При φ < 0 d1 > d2, i12 < 1, ω1 < ω2 (повышающая передача).
К недостаткам вариаторов относят ограничение по передаваемой мощности, из-за чего их не используют в грузовых автомобилях.
84
2.7. Кинематика планетарных механизмов
Планетарными механизмами называют зубчатые механизмы с подвижными осями колес.
|
z3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z1, z3 – центральные или солнечные колеса, |
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
z2 – сателлит (или планетное колесо), |
||
|
z2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
H – водило. |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
z1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Число степеней подвижности механизма (форму- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
лу Чебышева): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wï ë 3 4 2 4 1 2 2 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N=4 – число подвижных звеньев, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рн=4 – число низших кинематических пар, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рв=2 – число высших кинематических пар. |
|
|
Рис. 3.33 |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
Планетарные механизмы с неподвижным зубча- |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тым колесом называют эпициклическими. |
В планетарных механизмах уже нельзя использовать формулы, полученные для определения передаточного отношения ряда зубчатых колес, т.е.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
ω1 |
|
z2 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
ω |
2 |
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
||
Определение передаточного отношения. |
|||||||||||||||||||||
|
z3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Методом обращения движения: всем звеньям |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
механизма, включая стойку, сообщается угловая |
|||||||
|
z2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
скорость, равная угловой скорости водила н и на- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
z1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
правленная в противоположную сторону. |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В таком обращенном механизме водило оказы- |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вается неподвижным. |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
i(H ) |
1 H |
|
|
|
z2 |
|
|
|
z3 |
. |
(3.59) |
||
|
||||||||||||||
|
|
|
||||||||||||
13 |
|
3 H |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
z1 |
|
z2 |
|
|
||||
|
Здесь |
i(H ) |
– передаточное отношение от первого |
|||||||||||
|
|
13 |
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.33 |
колеса к третьему при неподвижном водиле Н, т.е. |
|
всистеме координат, связанной с водилом.
z2 – знак «минус» при внешнем зацеплении, z1
z3 – знак «плюс» при внутреннем зацеплении z2
85
Пример. Редуктор Давида.
|
|
|
|
|
|
|
|
|
|
|
Колесо с числом зубьев z4 неподвижное. |
|||||||||||||||||||||||||||||
|
z2 |
|
|
|
|
|
|
z3 |
|
|
Числа зубьев: z1=z3=100, z2=101, z4=99. |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Передаточное отношение от водила Н к колесу |
|||||||||||||||||||||||||||||||
z1 |
|
|
|
|
|
|
|
|
|
|
|
|
i(H ) |
1 |
H |
|
|
|
|
z2 |
|
|
|
|
z4 |
|
|
9999 . |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z4 |
|
|
|
|
|
|
|
|
|
|
|
4 |
H |
|
|
|
|
|
z1 |
|
|
z3 |
|
1000 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
Учитывая, что |
4 = 0, найдем отношение i(4) |
||||||||||||||||||||||||||||||||||
|
|
|
Рис. 3.34 |
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
при неподвижном четвертом колесе): |
|
H1 |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
i(H ) |
|
1 |
|
1 |
|
|
z2 |
|
|
|
z4 |
|
|
9999 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
14 |
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
z |
|
|
|
1000 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
H |
|
|
z1z3 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
i(4) |
|
|
|
|
|
|
|
|
|
|
|
10000 |
|
|
|
|
10000 , |
|
|
|||||||||||||
|
|
|
|
|
|
z |
|
|
10000 9999 |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
H1 |
|
|
|
z z |
z |
2 |
4 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
:
(т.е.
т.е. для того, чтобы первое колесо сделало один оборот, надо повернуть водило 10 000 раз. Обычно передаточное отношение в планетарных механизмах не превышает 150.
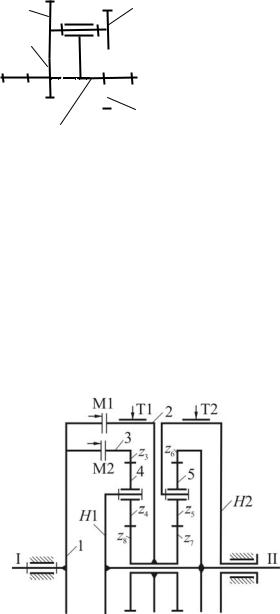
Пример. АКПП (автоматическая коробка переключения передач).
1-я передача. М1 и Т1 выключены, М2 и Т2 – включены: ω1 = ω3, ωH2 = 0.
i |
|
I |
|
3 |
1 |
z8 |
|
z6 |
|
z8 |
. |
|
|
z |
|
|
|||||||||
I-II 1 |
|
|
|
|
|
z |
7 |
|
z |
|||
|
|
II |
|
6 |
3 |
|
|
3 |
|
|||
2-я передача. М1 и Т2 выключены, М2 и Т1 – включены: ω1 = ω3, ω2 = ω7 = ω8.
i |
|
|
I |
|
3 |
1 |
z8 |
< (iI-II)1. |
|
2 |
|
|
z |
||||||
I-II |
|
|
|
H1 |
|
|
|||
|
|
|
II |
|
|
3 |
|
||
3-я передача (прямая). М1 и М2 включены, Т1 иТ2 – выключены: ω1 = ω3 = ω2.
Тогда ω1 = ωH1 = ωH2, |
|
|
|
I |
|
3 |
|
||
i |
|
3 |
|
|
1. |
||||
|
|
||||||||
I-II |
|
|
|
H1 |
|
||||
|
|
|
|
II |
|
|
|
||
4-я передача (задний ход). М1 и Т2 включены, М2 и Т1 – выключены: ω1 =ω2,
ωH2 = 0. |
|
|
|
I |
|
7 |
|
z6 |
|
||
i |
|
р |
|
|
|
< – 1. |
|||||
|
|
||||||||||
I-II |
|
|
|
|
z |
7 |
|
||||
|
|
|
|
II |
|
6 |
|
|
|
||
В нейтральной передаче муфты М1 и М2 выключены.
86
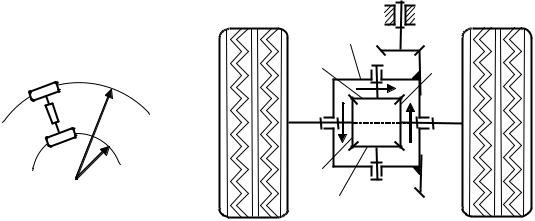
2.7.1. Автомобильный дифференциал
При повороте автомобиля ведущие колеса проходят разный путь (вращаются с разными скоростями ).
а) |
б) |
z2 |
H |
|
z1 |
||
|
R2
R1 |
z3 |
z4
Рис. 3.36
Передаточное отношение дифференциала при неподвижном водиле i13(H ) :
i(H ) |
1 |
H |
|
z2 |
|
z3 |
. |
(3.62) |
||
z |
|
|||||||||
13 |
|
|
H |
|
|
z |
2 |
|
|
|
|
3 |
|
1 |
|
|
|
|
|||
Знак передаточного отношения конического зубчатого механизма можно определить по правилу «стрелок».
При одинаковом числе зубьев колес z1=z2=z3 получим из выражения (3.62):
i(H ) |
1 |
H |
1, |
|
2 |
Н |
. |
(3.64) |
|
13 |
|
|
H |
|
1 |
3 |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
На ровной дороге водило вращается с той же угловой скоростью, что и колеса z1 и z3: 1 = 3 = Н.
На неровностях дороги и на поворотах Н 1 2 . 2
87