

Экзамен / тмм - экзамен(и задачи) / ТММ Экзамен! / Лекции / шпоры динамика / 15
.doc6.2. Уравнения Лагранжа второго рода
для механизма с несколькими степенями подвижности
Уравнения Лагранжа второго рода для механизма с w степенями подвижности, с жесткими звеньями и идеальными кинематическими парами могут быть получены из общего уравнения динамики, записанного в форме (4.28). Работа сил инерции на возможном перемещении, входящая в это уравнение, может быть выражена через кинетическую энергию системы. Для механизма с w степенями подвижности справедливо:
 =
=
 (6.17)
(6.17)
где Т(q1,
…, qw,![]() )
– кинетическая энергия механизма с w
степенями подвижности, представленная
как функция от обобщенных координат и
их производных. В результате при
независимых обобщенных координатах
уравнения (4.34) приводятся к виду:
)
– кинетическая энергия механизма с w
степенями подвижности, представленная
как функция от обобщенных координат и
их производных. В результате при
независимых обобщенных координатах
уравнения (4.34) приводятся к виду:
 (s = 1, … , w)
, (6.18)
(s = 1, … , w)
, (6.18)
где QS – обобщенные движущие силы;
 (6.19)
(6.19)
– обобщенные силы сопротивления, соответствующие всем активным силам, кроме движущих.
Кинетическая энергия каждого звена в общем случае определяется как кинетическая энергия твердого тела, совершающего сложное пространственное движение:
![]() , (6.20)
, (6.20)
где i
– номер звена, mi
– его масса, vci
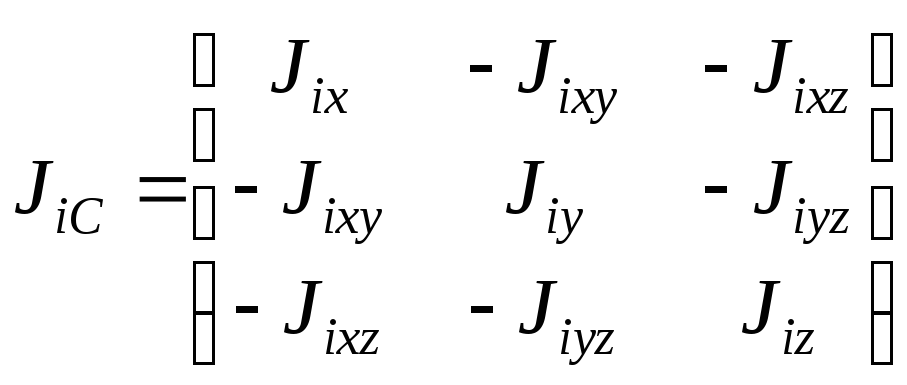
– скорость центра масс, JiС
– тензор инерции в системе осей,
начало которой находится в центре масс
i-го звена,
![]() – трехмерный вектор-столбец абсолютной
угловой скорости. Учитывая, что
– трехмерный вектор-столбец абсолютной
угловой скорости. Учитывая, что
 ,
(6.21)
,
(6.21)
где Jix, Jiy, Jiz – осевые моменты инерции i-го звена, Jixy, Jixz, Jiyz – центробежные моменты инерции, а
 ,
(6.22)
,
(6.22)
где
![]() – проекции вектора угловой скорости
i-го звена
– проекции вектора угловой скорости
i-го звена
![]() на оси i-й системы
координат, выражение (6.20) можно записать
в виде:
на оси i-й системы
координат, выражение (6.20) можно записать
в виде:
 (6.23)
(6.23)
В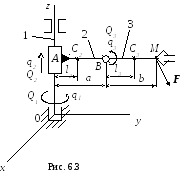 качестве примера рассмотрим схему
трехподвижного механизма (рис.6.3). Звено
1 вращается вокруг своей продольной
оси с угловой скоростью
качестве примера рассмотрим схему
трехподвижного механизма (рис.6.3). Звено
1 вращается вокруг своей продольной
оси с угловой скоростью
![]() .
По звену 1 со скоростью
.
По звену 1 со скоростью
![]() движется звено 2. Звено 3, связанное
со звеном 2 шарниром В, вращается
относительно звена 2 с угловой
скоростью
движется звено 2. Звено 3, связанное
со звеном 2 шарниром В, вращается
относительно звена 2 с угловой
скоростью
![]() .
На звене 3 имеется схват, в точке М
которого приложена активная сила
.
На звене 3 имеется схват, в точке М
которого приложена активная сила
![]() .
Центры масс второго и третьего звеньев
находятся в точках С2 и С3
соответственно.
.
Центры масс второго и третьего звеньев
находятся в точках С2 и С3
соответственно.
Кинетическую
энергию механизма определим как сумму
кинетических энергий его подвижных
звеньев. Для вращающегося звена 1 имеем
![]() где
где
![]() – момент инерции звена 1 относительно
оси z1,
совпадающей с осью его вращения.
– момент инерции звена 1 относительно
оси z1,
совпадающей с осью его вращения.
Звено 2 вращается вместе со звеном 1 и перемещается по нему, его кинетическая энергия равна:
![]() ,
,
где vC2
– скорость центра масс второго звена,
m2 – его
масса, J2 –
тензор инерции, построенный в осях
С2x2y2z2
(рис.6.4, а),
![]() – вектор-столбец угловой скорости.
– вектор-столбец угловой скорости.
Н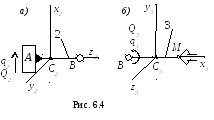 айдем
vC2
и
айдем
vC2
и
![]() :
:
![]() ,
,
 .
.
Подставим найденные значения в выражение для кинетической энергии Т2:
![]() ,
,
где
![]() .
Кинетическая энергия третьего звена
Т3:
.
Кинетическая энергия третьего звена
Т3:
![]() .
.
Найдем скорость центра масс третьего звена vC3.
 ,
,
 ,
,
![]()
Положим,
что звено 3
представляет собой тонкий однородный
стержень, а
![]() .
Тогда компоненты тензора инерции J3,
построенного в осях С3x3y3z3
(рис. 6.4, б):
J3x
= 0; J3y
= J3z
=
.
Тогда компоненты тензора инерции J3,
построенного в осях С3x3y3z3
(рис. 6.4, б):
J3x
= 0; J3y
= J3z
=
![]() ;
J3xy
= J3xz
= J3yz
= 0. Угловая скорость
;
J3xy
= J3xz
= J3yz
= 0. Угловая скорость
![]() :
:
 .
.
Отсюда получим:
 .
.
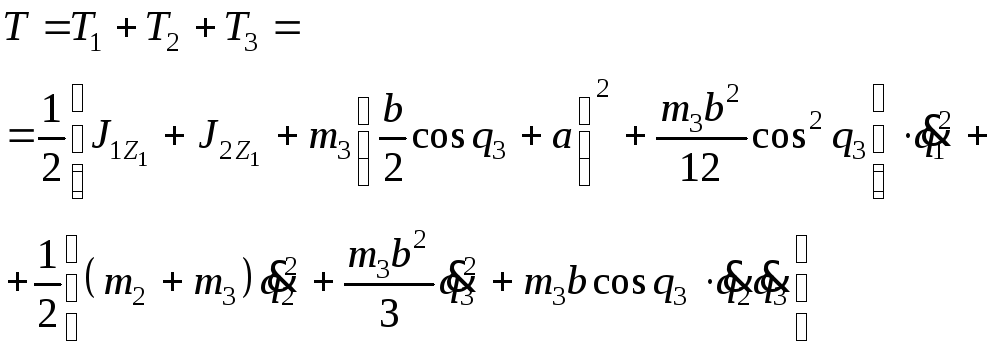
Полная кинетическая энергия механизма составит:
Найдем обобщенные силы сопротивления. Из выражения (6.19) следует:
 .
.
Здесь
учтено, что центр масс звена 1 не
изменяет своего положения. Из
кинематического анализа несложно
получить выражения для
![]() и
и
![]() :
:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Функция положения точки М:
 .
.
Отсюда
 ,
,
 ,
,
 ,
,
 ;
;
 ;
;
 ,
,
 ,
,
 ,
,
 .
.
Теперь несложно найти обобщенные силы сопротивления:
![]() ,
,
![]() ,
,
![]() .
.
Подставляя найденные значения в уравнения Лагранжа, получим три уравнения движения:
![]()

Из
приведенных уравнений видно взаимовлияние
приводов. Например, двигатель 2
«чувствует», как работает двигатель,
приводящий в движение звено 3
(движущий момент Q2
зависит от
![]() и от
и от
![]() ).
).