

Экзамен / тмм - экзамен(и задачи) / ТММ / tmm_19
.doc8.5. Движущий момент и динамические нагрузки в передаче
в установившемся режиме при учете статической характеристики двигателя
Движущий момент. Подставим динамическую ошибку по скорости (8.38) в линеаризованную характеристику двигателя (8.34):
 , (8.40)
, (8.40)
где
![]() – переменная составляющая движущего
момента. Определим среднюю мощность
двигателя за время
– переменная составляющая движущего
момента. Определим среднюю мощность
двигателя за время
![]() одного цикла оборота кривошипа, учитывая,
что
одного цикла оборота кривошипа, учитывая,
что
 :
:

где
![]() – средняя мощность двигателя, работающего
на постоянной угловой скорости
– средняя мощность двигателя, работающего
на постоянной угловой скорости
![]() ,
,

– потери мощности,
вызванные неравномерностью вращения
двигателя. Расчеты показывают, что при
большом коэффициенте неравномерности
(![]() )
потери мощности могут составлять более
2-3 %.
)
потери мощности могут составлять более
2-3 %.
Динамические
нагрузки в передаточном механизме.
Неравномерность вращения приводит к
тому, что приведенный к входному звену
момент в передаточном механизме
отличается от движущего момента. Это
отличие определяется моментом сил
инерции ротора двигателя. На рис.8.6
представлена схема механической системы
машинного агрегата, состоящей из ротора
двигателя, передаточного и исполнительного
механизмов. Момент
![]() приложен к ротору, обладающему постоянным
моментом инерции
приложен к ротору, обладающему постоянным
моментом инерции
![]() ,
,
![]() – момент, возникающий в передаточном
механизме. Составим уравнение движения
ротора:
– момент, возникающий в передаточном
механизме. Составим уравнение движения
ротора:

![]() .
.
Учитывая,
что
![]() и принимая для
и принимая для
![]() выражение (8.34), имеем
выражение (8.34), имеем
![]() .
.
Отсюда
![]() ,
,
где
![]() (8.41)
(8.41)
– переменная часть
момента в передаточном механизме.
Дифференцируя выражение (8.38) , найдем
![]() ;
подставляя
;
подставляя
![]() и
и
![]() в (8.41), после несложных преобразований
находим:
в (8.41), после несложных преобразований
находим:
 , (8.42)
, (8.42)

Переменный момент, действующий в передаточном механизме, отрицательно влияет на работу машины: он вызывает упругие колебания, нарушающие точность механизмов, приводящие к повышенному износу передачи.
Потери
энергии, происходящие при упругих
колебаниях, приводят к дополнительному
снижению КПД передаточного механизма.
Следует, однако, заметить, что каждая
из амплитуд
![]() гармоник момента
гармоник момента
![]() меньше амплитуды соответствующей
гармоники
меньше амплитуды соответствующей
гармоники
![]() в
в
![]() ,
поскольку при
,
поскольку при
![]()
 , (8.43)
, (8.43)
в силу того, что
![]() ;
;
![]() .
Чем мягче характеристика двигателя и
чем меньше момент инерции ротора
двигателя, тем меньше выражение (8.43).
.
Чем мягче характеристика двигателя и
чем меньше момент инерции ротора
двигателя, тем меньше выражение (8.43).
Способы
уменьшения динамических ошибок и
динамических нагрузок при установившемся
движении машины. Анализируя выражения
(8.38), (8.40) и (8.42), легко заметить, что
уменьшение неравномерности вращения,
переменной части движущего момента и
момента в передаточном механизме может
быть достигнуто снижением амплитуд
гармоник возмущающего момента
![]() .
Таким образом, уменьшение внутренней
виброактивности механической системы
машины приводит к улучшению всех
динамических показателей качества
процесса установившегося движения.
Вместе с тем эти показатели зависят от
таких параметров машинного агрегата,
как
.
Таким образом, уменьшение внутренней
виброактивности механической системы
машины приводит к улучшению всех
динамических показателей качества
процесса установившегося движения.
Вместе с тем эти показатели зависят от
таких параметров машинного агрегата,
как
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
Легко видеть, что увеличение
.
Легко видеть, что увеличение
![]() ,
,
![]() или
или
![]() приводит к уменьшению
приводит к уменьшению
![]() (в выражении (8.38) эти параметры стоят в
знаменателях, их увеличение приводит
к уменьшению амплитуд всех гармоник).
Отметим, что увеличить
(в выражении (8.38) эти параметры стоят в
знаменателях, их увеличение приводит
к уменьшению амплитуд всех гармоник).
Отметим, что увеличить
![]() можно двумя способами: увеличением
можно двумя способами: увеличением
![]() ,
то есть присоединением дополнительной
массы к ротору двигателя, или увеличением
,
то есть присоединением дополнительной
массы к ротору двигателя, или увеличением
![]() ,
то есть установкой дополнительной массы
на выходном валу передаточного механизма.
Такая дополнительная масса, предназначенная
для уменьшения неравномерности вращения,
называется маховиком. Очевидно, что
при одном и том же значении приведенного
момента инерции маховика, то есть при
одном и том же эффекте от его установки,
собственный момент инерции маховика,
устанавливаемого на выходе передаточного
механизма, должен быть в
,
то есть установкой дополнительной массы
на выходном валу передаточного механизма.
Такая дополнительная масса, предназначенная
для уменьшения неравномерности вращения,
называется маховиком. Очевидно, что
при одном и том же значении приведенного
момента инерции маховика, то есть при
одном и том же эффекте от его установки,
собственный момент инерции маховика,
устанавливаемого на выходе передаточного
механизма, должен быть в
![]() раз больше момента инерции маховика,
установленного на входе этого механизма,
где
раз больше момента инерции маховика,
установленного на входе этого механизма,
где
![]() – передаточное отношение. С этой точки
зрения предпочтительнее устанавливать
маховик на двигателе. Переменная часть
движущего момента (8.40) при такой установке
маховика также уменьшается, а динамические
нагрузки в передаточном механизме,
вообще говоря, увеличиваются. Действительно,
при увеличении
– передаточное отношение. С этой точки
зрения предпочтительнее устанавливать
маховик на двигателе. Переменная часть
движущего момента (8.40) при такой установке
маховика также уменьшается, а динамические
нагрузки в передаточном механизме,
вообще говоря, увеличиваются. Действительно,
при увеличении
![]() и
и
![]() на одну и ту же величину, то есть при
установке маховика на стороне двигателя
происходит увеличение как числителей,
так и знаменателей выражения (8.42);
поскольку числители меньше знаменателей,
величина дроби при этом возрастает.
на одну и ту же величину, то есть при
установке маховика на стороне двигателя
происходит увеличение как числителей,
так и знаменателей выражения (8.42);
поскольку числители меньше знаменателей,
величина дроби при этом возрастает.
Улучшение
всех динамических критериев качества
установившегося движения достигается
при увеличении крутизны
![]() характеристики среднего момента сил
сопротивления. При этом уменьшаются
ошибки по скорости и переменные моменты
характеристики среднего момента сил
сопротивления. При этом уменьшаются
ошибки по скорости и переменные моменты
![]() и
и
![]() .
Увеличение крутизны характеристики
двигателя
.
Увеличение крутизны характеристики
двигателя
![]() также приводит к уменьшению
неравномерности вращения, но величины
также приводит к уменьшению
неравномерности вращения, но величины
![]() и
и
![]() при этом возрастают. Влияние параметров
машины на динамические критерии качества
движения показано в табл. 8.1.
при этом возрастают. Влияние параметров
машины на динамические критерии качества
движения показано в табл. 8.1.
Таблица 8.1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
Все
эти результаты, представленные в таблице,
имеют простой физический смысл. Источником
возмущения
![]() является исполнительный механизм.
Устанавливая маховик на вал ротора
двигателя или увеличивая крутизну его
статической характеристики, мы тем
самым прикладываем к двигателю инерционное
воздействие или дополнительный движущий
момент, в той или иной мере компенсирующие
это возмущение, снижая при этом
неравномерность вращения. Однако
приложение двух противоположно
направленных воздействий на концах
кинематической цепи, образованной
передаточным механизмом, а в случае
увеличения крутизны
является исполнительный механизм.
Устанавливая маховик на вал ротора
двигателя или увеличивая крутизну его
статической характеристики, мы тем
самым прикладываем к двигателю инерционное
воздействие или дополнительный движущий
момент, в той или иной мере компенсирующие
это возмущение, снижая при этом
неравномерность вращения. Однако
приложение двух противоположно
направленных воздействий на концах
кинематической цепи, образованной
передаточным механизмом, а в случае
увеличения крутизны
![]() включающей и ротор двигателя, приводит
к нагружению всех звеньев этой цепи
приложенными воздействиями.
включающей и ротор двигателя, приводит
к нагружению всех звеньев этой цепи
приложенными воздействиями.
Отметим, что в случае, когда источником возмущающего момента является двигатель (это имеет место, например в машинах с двигателями внутреннего сгорания), ситуация изменяется: установка маховика на выходном звене двигателя приводит к разгрузке передаточного механизма.
8.6. Влияние динамической характеристики двигателя
на установившееся движение
Динамическая
характеристика двигателя (8.12) отличается
от статической наличием в левой части
слагаемого
![]() ;
для установившегося движения она может
быть представлена в виде
;
для установившегося движения она может
быть представлена в виде
![]() . (8.44)
. (8.44)
Рассмотрим, к чему приводит учет динамической характеристики двигателя при исследовании установившегося движения машинного агрегата. Задача сводится в этом случае к определению периодического решения системы дифференциальных уравнений (8.44) и (8.20). Запишем эти уравнения в форме
 . (8.45)
. (8.45)
При отсутствии возмущений, характеризуемых членами, стоящими в привой части (8.45), рассматриваемая система имела бы стационарное решение вида
![]() ,
,
![]() , (8.46)
, (8.46)
соответствующее
равномерному вращению при постоянном
движущем моменте. Будем по-прежнему
считать, что при наличии возмущений
установившееся движение остается
близким к режиму равномерного вращения
(![]() ),
а движущий момент мало отличается от
постоянного. Тогда для решения системы
уравнений (8.45) можно принять метод
последовательных приближений, аналогичный
рассмотренному выше. Вначале найдем
решение системы уравнений
),
а движущий момент мало отличается от
постоянного. Тогда для решения системы
уравнений (8.45) можно принять метод
последовательных приближений, аналогичный
рассмотренному выше. Вначале найдем
решение системы уравнений
 .
.
Подставим в них нулевое приближение, которое будем искать в виде
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Находим
 .
.
Складывая эти уравнения, получаем
![]() ,
,
![]() .
.
Таким
образом, для определения средней угловой
скорости ротора двигателя получилось
уравнение, совпадающее с (8.26). Это
означает, что учет динамической
характеристики двигателя не влияет в
первом приближении на величину средней
угловой скорости
![]() .
.
Подставим
найденное нулевое приближение в правую
часть уравнения (8.45), получим систему
уравнений для определения в первом
приближении
![]() и
и
![]() :
:
 , (8.46)
, (8.46)
где
![]() – возмущающий момент. Будем искать
решение системы (8.46) в виде
– возмущающий момент. Будем искать
решение системы (8.46) в виде
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Заменим
в левой части уравнения (8.46) моменты
![]() и
и
![]() их линеаризованными выражениями (8.34):
их линеаризованными выражениями (8.34):
Получаем
 . (8.47)
. (8.47)
Из первого уравнения системы (8.47) определим
![]() ,
,
отсюда
![]() .
.
Подставляя
![]() и
и
![]() во второе уравнение (8.47), получаем
дифференциальное уравнение третьего
порядка относительно
во второе уравнение (8.47), получаем
дифференциальное уравнение третьего
порядка относительно
![]() :
:
![]() . (8.48)
. (8.48)
В
большинстве случаев в реальных машинах
![]() ,
что позволяет отбросить второе слагаемое
в коэффициенте при
,
что позволяет отбросить второе слагаемое
в коэффициенте при
![]() .
Поделив все члены уравнения (8.48) на
.
Поделив все члены уравнения (8.48) на
![]() ,
получим:
,
получим:
![]() , (8.49)
, (8.49)
где
 – механическая постоянная времени
машинного агрегата. Представим
– механическая постоянная времени
машинного агрегата. Представим
![]() в форме ряда Фурье
в форме ряда Фурье
 . (8.50)
. (8.50)
Решение уравнения (8.49) равно сумме частного и общего решений однородного уравнения. Общее решение данного уравнения стремится к нулю с ростом t, поэтому установившемуся движению системы соответствует частное периодическое решение, которое будем искать в виде (8.36). Подставим (8.36) и (8.50) в (8.49):

 ,
,
 ,
,
 ,
,
 .
.
Приравняем коэффициенты при косинусах и фазы:
 ,
,
![]() .
.
Окончательно получаем:
 , (8.51)
, (8.51)
 . (8.52)
. (8.52)
Неравномерность
вращения характеризуется прежде всего
амплитудами гармоник ряда (8.52). Амплитуда
![]() -ой
гармоники определяется как произведение
коэффициента
-ой
гармоники определяется как произведение
коэффициента
![]() на значение функции
на значение функции
 , (8.53)
, (8.53)
где
![]() .
На рис. 8.7 приведены графики функций
(8.53), построенные для различных величин
отношения
.
На рис. 8.7 приведены графики функций
(8.53), построенные для различных величин
отношения
![]() .
При
.
При
![]() форма кривых мало отличается от той,
которая получается при
форма кривых мало отличается от той,
которая получается при
![]() .
При
.
При
![]() появляется дополнительный максимум
функции
появляется дополнительный максимум
функции
![]() .
Анализ выражения (8.53) показывает, что
этому максимуму соответствует
.
Анализ выражения (8.53) показывает, что
этому максимуму соответствует
 (8.54)
(8.54)
В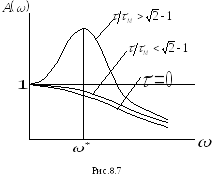 еличина
максимального значения
еличина
максимального значения
![]() также зависит от
также зависит от
![]() .
При
.
При
![]() она достигает 2,5, а при
она достигает 2,5, а при
![]() возрастает до 4,5. Увеличение коэффициента
возрастает до 4,5. Увеличение коэффициента
![]() при
при
![]() означает увеличение амплитуды той
гармоники
означает увеличение амплитуды той
гармоники
![]() ,
частота которой
,
частота которой
![]() является близкой к
является близкой к
![]() .
Соответственно увеличивается и
неравномерность вращения. Это явление
называется двигательным резонансом
машины. При фиксированном значении
.
Соответственно увеличивается и
неравномерность вращения. Это явление
называется двигательным резонансом
машины. При фиксированном значении
![]() функция
функция
![]() при данном
при данном
![]() зависит от величины
зависит от величины
![]() .
Можно показать, что эта зависимость не
является монотонной: величина
.
Можно показать, что эта зависимость не
является монотонной: величина
![]() достигает максимума при
достигает максимума при
![]() . (8.55)
. (8.55)
Если
![]() ,
то увеличение этого параметра может
привести к росту
,
то увеличение этого параметра может
привести к росту
![]() .
Но
.
Но
![]() пропорционально
пропорционально
![]() ,
поэтому увеличение среднего момента
инерции
,
поэтому увеличение среднего момента
инерции
![]() ,
например, при установке маховика, может
приводить к увеличению неравномерности
вращения. Отметим, что по ряду причин
технологический процесс в машиностроении
сопровождается в реальных машинных
агрегатах увеличением отношения
,
например, при установке маховика, может
приводить к увеличению неравномерности
вращения. Отметим, что по ряду причин
технологический процесс в машиностроении
сопровождается в реальных машинных
агрегатах увеличением отношения
![]() ;
при этом часто проявляются отмеченные
выше особенности поведения машины в
установившемся режиме, и учет динамической
характеристики двигателя становится
необходимым.
;
при этом часто проявляются отмеченные
выше особенности поведения машины в
установившемся режиме, и учет динамической
характеристики двигателя становится
необходимым.