

ЭКЗ / tmm_chapter1
.pdfВВЕДЕНИЕ
Технологические машины (станки, прессы, машины-автоматы, машины текстильной и пищевой промышленности и т.д.), энергетические (например, двигатели внутреннего сгорания), транспортные (автомобили, конвейеры, промышленные роботы и т.д.).
ГЛАВА 1. СТРУКТУРА МЕХАНИЗМОВ И МАШИН
1.1. Структура машины и ее функциональные части
Механическая систему машины (МС), рабочий процесс (РП), двигатель (Д), система программного управления (СПУ.
|
uп u |
|
q |
|
|
х |
|
||
СПУ |
Д |
МС |
РП |
||||||
|
|
Р |
|||||||
|
|
|
|
|
|
|
|
||
|
u |
|
Q |
|
|
|
|
||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|||
|
СОС |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Рис. 1.1
1.2.Основные модели теории механизмов и машин
1.Простейшая модель, которой будем пользоваться в дальнейшем – звено (жесткое звено, упругое звено).
Стойка, кривошип, коромысло, ползун, шатун, кулиса.
2.Модель подвижного соединения двух звеньев называется кинематиче-
ской парой (КП).
Недеформируемые, а связи, накладываемые КП, являются голономными, стационарными и удерживающими.
Число степеней свободы s, r – число связей, накладываемых КП, s + r = 6.
Вращательная КП, поступательная КП (s = 1, r = 5).
1 |
2 |
|
x |
|
|||
|
1 |
2 |
|
|
|
1 |
2 |
|
|
||
|
Рис. 1.2 |
|
Рис. 1.3 |
|
|
|
3 |
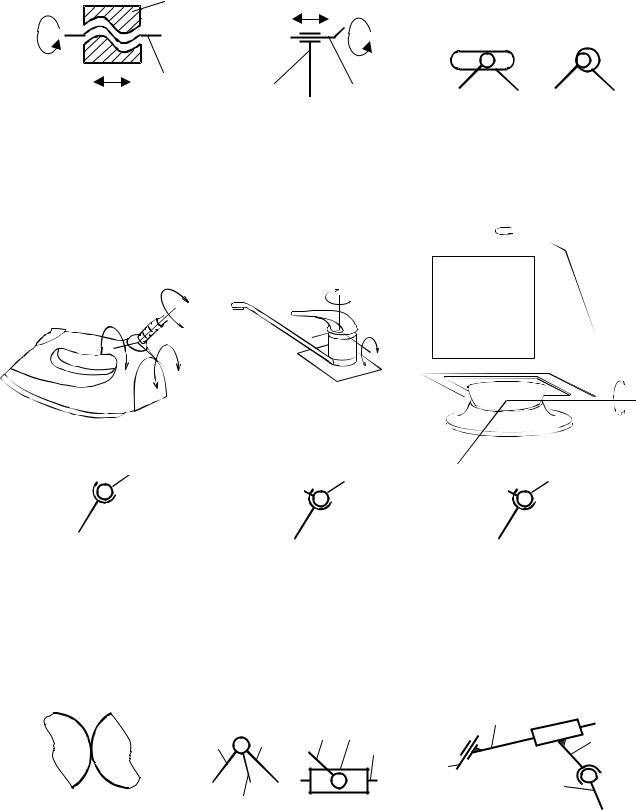
Винтовая пара (s = 1, r = 5), |
|
|
Двухподвижная пара (s = 2, r = 4). |
|||
|
2 |
|
x |
|
а) |
б) |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
1 |
1 |
|
2 |
|
|
|
x |
|
|
|
||
|
|
|
|
|
|
|
|
Рис. 1.4 |
|
Рис. 1.5 |
|
Рис. 1.6 |
|
Трехподвижная пара (s = 3, r = 3).
а) |
б) |
в) |
Рис. 1.7
Низшие, высшие КП. |
Две КП. |
|
|
Кинематическая цепь (КЦ) |
|
||
а) |
|
б) |
|
|
|
B |
|
|
|
|
|
А |
2 |
|
|
1 |
3 |
1 2 |
|
3 |
|
||
3 |
|
|
|||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
4 |
C |
|
2 |
|
|
|
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Рис. 1.8 |
Рис. 1.9 |
|
|
|
Рис. 1.10 |
|
|
|
|
|
|
|
|
||
4

3. Кинематическая цепь – совокупность звеньев, связанных между собой кинематическими парами (рис. 1.10).
Число степеней подвижности Wц:
|
s 5 |
|
|
Wц 6Nц 5 p1 4 p2 3 p3 2 p4 |
p5 6N (6 |
s) ps , |
(1.1) |
s 1
А |
2 |
B |
|
||
|
|
1
4
Рис. 1.10
где рs – число s-подвижных кинематических пар в
3 цепи.
Для примера, показанного на рис. 1.10, имеем:
CNц = 4;
р1 = 1 (поступательная пара B); р2 = 1 (цилиндрическая пара A); р3 = 1 (сферический шарнир С);
Wц = 6 4 – 5 1 – 4 1 – 3 1 = 12.
4. Кинематическая цепь, в которой одно из звеньев принято за неподвижное, называется механизмом. Число степеней подвижности механизма W (следует учитывать только число подвижных звеньев N):
s 5 |
|
|
W 6N (6 |
s) ps . |
(1.2) |
s 1
Формула (1.2) называется структурной формулой Малышева–Сомова.
1 2 3
q1 
0 q2
q3
Рис. 1.11
Пример. Число степеней подвижности исполнительного механизма промышленного робота (все КП в этом механизме – одноподвижные – одна поступательная и две вращательных).
W = 6 3 – 5 3 = 3.
Нормальный механизм (входов совпадает с числом степеней подвижности). Структура «дерева» (каждое звено соединено с предыдущим одной КП ):
s 5 |
s 5 |
N ps , |
Wд sps |
s 1 |
s 1 |
(число степеней подвижности механизма равно сумме степеней подвижности всех КП).
5

5. Структурная группа – кинематическая цепь, в которой число входов |
||||
равно числу степеней подвижности (Wц = n). Такое понятие структурной груп- |
||||
пы было предложено проф. М.З. Коловским. |
||||
|
1 |
2 |
3 |
6. |
|
В механизме со структурой «дерева» каждое |
|||
|
|
|
|
|
|
|
|
|
звено является структурной группой: |
q1 |
|
q3 |
|
Wц 6 1 5 1 1 n , |
|
|
|
каждая группа имеет одно звено (N = 1), одну |
|
0 |
q2 |
|
|
одноподвижную КП (p1 = 1), один вход (n = 1). |
Рис. 1.11 |
Структурная группа, как и нормальный ме- |
|
ханизм, поддается геометрическому анализу. |
||
|
Группы Асура - структурная группа, в которой число степеней подвижности равно нулю.
Рассмотрим примеры.
а) |
б) |
B |
C |
|
|||
|
|
|
|
q1 |
q1 |
|
|
|
|
А |
D |
|
|
|
|
Рис. 1.12 |
|
Рис. 1.13 |
|
На рис. 1.12, а – одноподвижная СГ (W = 6 1–5 1 = 1). |
|
||
На рис. 1.12, б – одноподвижный мехенизм (W = 6 1–5 1 = 1). На рис. 1.13 – две СГ:
AB (одноподвижная СГ),
BC и CD (группа Ассура): Wц = = 6 2 – 5 1 – 4 1 – 3 1 = 0 (одноподвижная пара D, двухподвижная пара С и трехподвижная пара В).
На рис. 1.14 изображена схема платформы Стюарта. В ней N = 13, р1 = 6, р2 = 6, р3 = 6. Следовательно,
|
W = 6 13 – 5 6 – 4 6 – 3 6 = 6, |
|
т.е. платформа обладает шестью сте- |
Рис. 1.14 |
пенями подвижности. |
6
Наряду со структурной формулой Малышева–Сомова, для определения числа степеней подвижности механизма можно воспользоваться методом размы-
кания:
1.Размыкаем кинематические пары, преобразуя замкнутую структуру механизма в структуру «дерева».
2.Определяем, является ли кинематическая цепь структурной группой. Это так, если:
кинематическая цепь может быть отделена от механизма,
число разомкнутых связей в этой цепи равно суммарному числу степеней подвижности пассивных шарниров.
Рассмотрим механизм, показанный на рис. 1.13:
1.Размыкаем шарнир D (5 связей).
2.Цепь, включающая в себя звенья BC и CD, является структурной группой, так как
может быть отделена от механизма;
число разомкнутых связей в этой группе (5) равно суммарному числу степеней подвижности пассивных шарниров C (s = 2) и B (s = 3).
7
1.3.Механизмы с избыточными связями
илишними степенями подвижности
а) |
|
|
б) |
|
Шарнирный четырех- |
|
|
|
|
|
|
звенник. |
|
2 |
B |
|
2 |
B |
Из структурной формулы |
|
А |
3 |
А |
|
3 |
Малышева–Сомова: |
|
|
|
|
|
|
W = 6 3 – 5 4 = – 2, |
|
|
C |
|
|
C |
т.е. |
рассматриваемая |
1 |
1 |
|
схема |
представляет собой |
||
|
|
|
|
|
неподвижную ферму (избы- |
|
|
Рис. 1.15 |
|
|
точные связи – требование к |
||
|
|
|
|
|
соблюдению параллельно- |
|
сти осей шарниров).
Рис. 1.15,б – W = 6 3–5 1 – 4 3 = 1(зазоры в соединениях, падает точность работы).
Число избыточных связей q: q = 1 – ( –2) = 3.
Структурная формула Малышева – Сомова с учетом избыточных связей имеет вид:
s 5 |
|
|
W 6N (6 |
s) ps q . |
(1.2′) |
s 1
Механизм Беннета.
W = 6 3–5 1 – 4 3 = 1
Рис. 1.16
В этом механизме возможно появление лишних степеней подвижности, выраженное вращением шатуна и коромысла вокруг их продольных осей.
10
1.4. Плоские механизмы и плоские группы Ассура
Плоский механизм – такой, в котором звенья перемещаются в параллельных
плоскостях. Формула Чебышёва: |
|
Wп = 3N – 2pн – рв . |
(1.3) |
а) |
|
|
2 |
B |
|
А |
3 |
А |
1 |
C |
1 |
|
б)
2 B
3
 C
C
Здесь N – число подвижных звеньев механизма;
рн – число низших кинематических пар;
рв – число высших кинематических пар.
Wп = 3 3 – 2 4 = 1.
Рис. 1.15
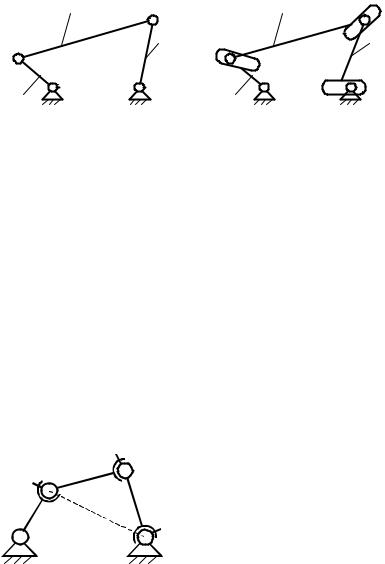
Кулачковый механизм.
Здесь звено 1 – кулак, звено 2 – толкатель, звено 3 – ролик, 0 – стойка.
В механизме три низших кинематических пары (две вращательных и одна поступательная) и одна высшая (соединение кулака и ролика).
По формуле Чебышёва Wп = 3 3 – 2 3 – 1 1 = 2.
Вторая степень подвижности (вращение ролика вокруг своей оси) – лишняя.
11
Структурные группы.
Число степеней подвижности плоских структурных групп:
Wпг=3N – 2 pн – pв . |
(1.4) |
|
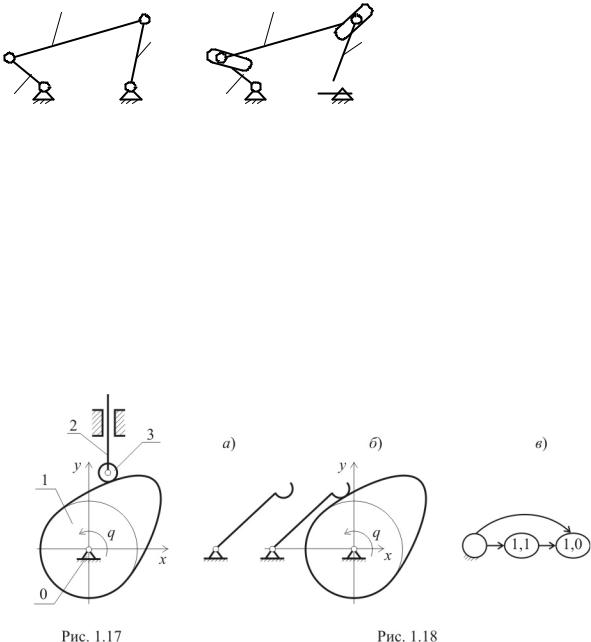
Если Wпг = 0, то такая СГ называется плоской группой Ассура. |
|
|
N = 1, тогда рн = 1 и рв = 1, |
Wпг=1 N – 2 1 – 1 |
|
(в ГА с одним звеном должна быть 1 низшая и 1 высшая КП – рис. 1.18, а).
Граф структуры, изображенный на рис. 1.18, в, показывает, что структура механизма представляет собой однозвенную одноподвижную группу, которая связана с однозвенной группой Ассура и со стойкой.
Если N = 2 (такую группу Ассура называют диадой), тогда рн = 3, рв = 0
|
а) |
б) |
|
|
1 |
B |
B |
|
1 |
|
|
|
|
|
|
2 |
А |
|
|
|
А |
|
C |
А |
|
C |
|
|
|
|
|
|
|
Рис. 1.19
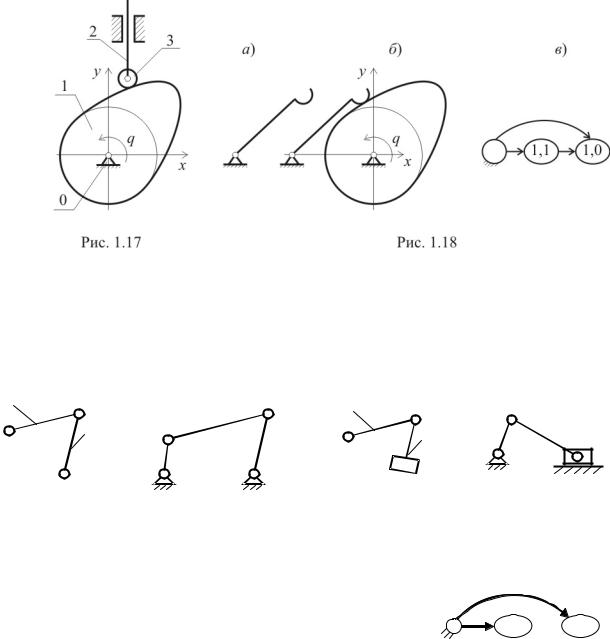
Рис. 1.19, а – три вращательные пары
(ВВВ),
б – шарнирный четырехзвенник.
Рис. 1.20, а – диада ВВП,
б – кривошипно-ползунный механизм. Рис. 1.21 – граф структуры.
а) |
б) |
B |
А |
|
|
2 |
B,C |
C
Рис. 1.20
1,1  2,0
2,0
Рис. 1.21
12
|
|
|
|
Если N = 3, тогда рн = 4, рв = 1, |
|
|
|
|
|
Wпг = 3 3 – 2 4 – 1 = 0 (Рис. 1.22) |
|
1 |
|
|
3 |
Если N = 4, тогда рн = 6, рв = 0, |
|
|
|
||||
2 |
|||||
|
|||||
|
|
Wпг = 3 4 – 2 6– 0 = 0 (Рис. 1.23) |
|||
|
|
|
|
||
|
Рис. 1.22 |
|
Рис. 1.21 – граф структуры. |
||
|
|
|
|||
|
а) |
|
|
|
б) |
в) |
|
2 |
3 |
E |
|
|
C |
E |
|
|
C |
|
|
|
B |
|
|
1 |
B |
F |
|
А |
D |
F |
4,0 |
|
D |
O |
|
1,1 |
|||
|
|
|
|
|
|
||
А |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Рис. 1.23 |
|
|
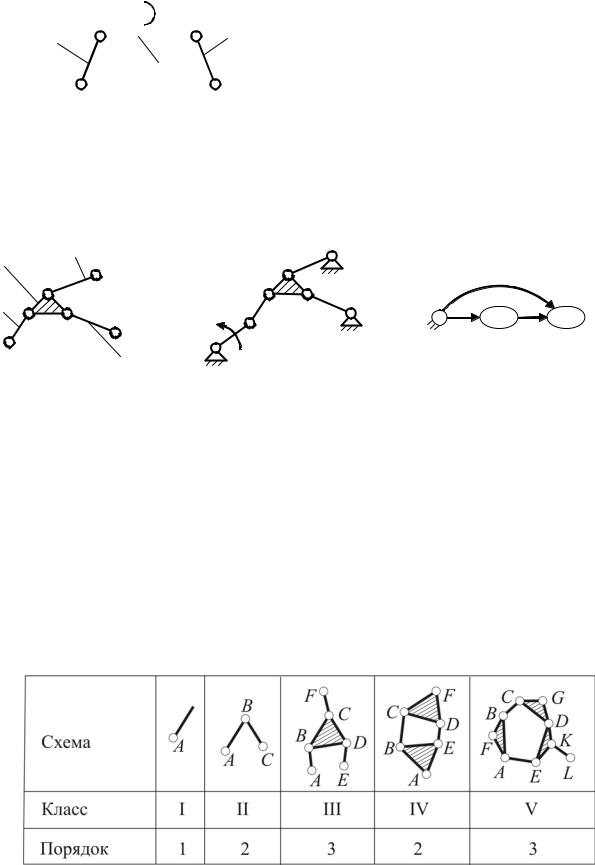
Деление групп на классы и порядки.
Класс группы определяется классом наивысшего номера контура, входящего в состав группы.
Класс контура, в свою очередь, соответствует числу кинематических пар, входящих в состав контура.
Порядок группы соответствует числу внешних для группы кинематических пар.
Таблица 1.1
13
1.5. Структурные преобразования механизмов
Структурное преобразование состоит в условном перенесении входов, целью которого является упрощение структуры механизма.
|
а) |
|
|
|
б) |
|
ВВВ |
C |
|
|
|
|
|
ВВВ |
|
E |
|
|
|
|
|
B |
q |
F |
1,1 |
2,0 |
2,0 |
|
А |
|
||||
|
D |
|
|
|
||
|
|
|
ВВВ |
ВВВ |
||
|
|
|
|
|||
|
|
|
|
|
O 
Рис. 1.24
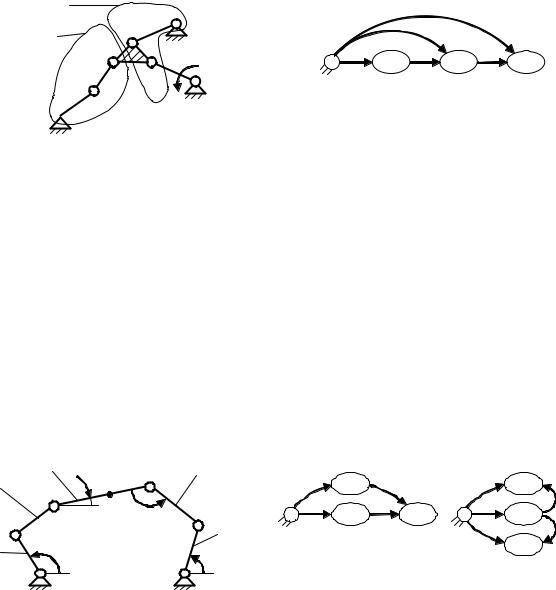
Структурная инверсия.
При структурной инверсии выходные координаты механизма (координаты рабочих органов) рассматриваются как входные, а обобщенные координаты входных звеньев и пар – как выходные.
|
|
а) |
|
|
б) |
|
в) |
2 |
3 |
M |
C |
4 |
1,1 |
|
2,0 |
B |
|
|
D |
|
|||
|
|
|
|
|
1,3 |
||
|
А |
|
q3 |
1,1 |
3,1 |
||
|
|
|
|||||
|
|
|
5 |
|
|
||
1 |
|
q1 |
|
|
|
2,0 |
|
|
E |
q2 |
|
|
|||
|
O |
|
|
|
|
||
|
|
|
|
|
|
|
Рис. 1.25
Схема плоской платформы. Число степеней подвижности:
Wп = 3 5 –2 6 = 3.
Примем координаты хм, ум, за входные, а обобщенные координаты q1, q2, q3 – за выходные. Тогда структура механизма изменится, рис. 1.25, в.
14