

Коррекция искажений, вызванных равномерным прямолинейным движением объекта. Учет граничных условий
К сожалению, рассмотренная нами модель не совсем точно описывает процесс искажения изображений, в случае если изображение объекта больше размеров регистрирующей среды, или в процессе движения выходит за границы кадра.
Рассмотрим, каким образом искажается
каждая отдельная точка исходного
изображения
.
Обозначим искаженное изображение каждой
отдельной точки исходного как
![]() .
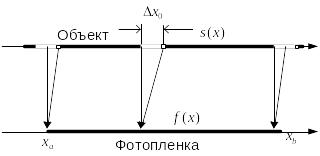
Будем, как и прежде, считать, что движение
осуществляется в положительном
направлении оси OX. При таком движении
каждая точка исходного изображения с
координатой
превращается в линию длиной x
с интенсивностью
.
Будем, как и прежде, считать, что движение
осуществляется в положительном
направлении оси OX. При таком движении
каждая точка исходного изображения с
координатой
превращается в линию длиной x
с интенсивностью
![]() .
Т.е ее изображение можно описать
соотношением
.
Т.е ее изображение можно описать
соотношением
![]() .
.
Однако для точек расположенных в областях
![]() и
и
![]() где
где
![]() и
и
![]() границы искаженного изображения это
выражение несправедливо. Точки, которые
принадлежат области
,
вдвигаются в область искаженного
изображения, а точки, принадлежащие
области
выдвигаются из нее. В силу этого, длина
отрезка, которым эти точки представлены
в искаженном изображении будет меньше,
чем для точек из области
границы искаженного изображения это
выражение несправедливо. Точки, которые
принадлежат области
,
вдвигаются в область искаженного
изображения, а точки, принадлежащие
области
выдвигаются из нее. В силу этого, длина
отрезка, которым эти точки представлены
в искаженном изображении будет меньше,
чем для точек из области
![]() .
.
Таким образом, величина
![]() является не константой, а функцией
координаты
точки неискаженного изображения
.
Очевидно, что функция
является не константой, а функцией
координаты
точки неискаженного изображения
.
Очевидно, что функция
![]() имеет следующий вид, показанный на
рис.1.
имеет следующий вид, показанный на
рис.1.
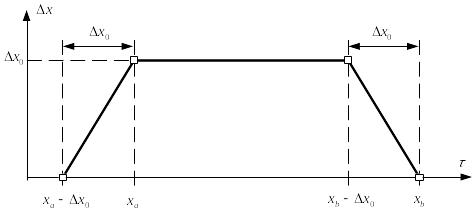
Или в аналитическом виде
 .
.
Для получения искаженного изображения проинтегрируем функцию по :

Подставим в соотношение выражение
и разделим область интегрирования
на интервалы в соответствии с определением
![]() .
В результате получим
.
В результате получим
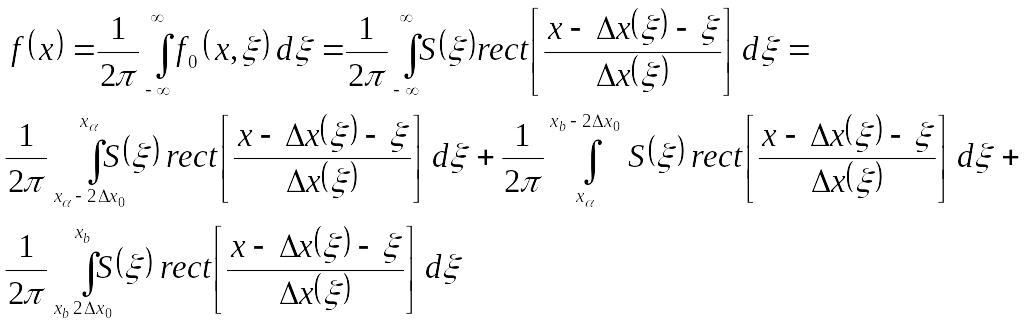
 (27.3)
(27.3)
Полученное выражение содержит три
компоненты. Вторая из них представляет
собой свертку функций
и
функции
![]() .
Ядро двух других компонент не является
разностным, более того, оно не является
и симметричным. В силу этого использование
для восстановления изображения алгоритма,
основанного на представлении ядра как
разностной функции некорректно и
приводит к высокому уровню шума в
изображении, если
.
Ядро двух других компонент не является
разностным, более того, оно не является
и симметричным. В силу этого использование
для восстановления изображения алгоритма,
основанного на представлении ядра как
разностной функции некорректно и
приводит к высокому уровню шума в
изображении, если
![]() при
при
![]() и
и
![]() .
.
Разрешающая способность систем формирования изображений
Понятие о разрешающей способности
Одним из основных параметров, характеризующих качество изображений, является разрешающая способность, Под разрешающей способностью понимают способность системы формирования изображения воспроизводить мелкую структуру восстанавливаемого сигнала. Например, в радиолокации разрешающая способность определяет минимальное расстояние, начиная с которого две отдельные цели отображаются на экране радиолокатора в виде двух отметок. В спектральном анализе разрешающая способность определяет минимальную разность частот двух спектральных составляющих, начиная с которой анализатор спектра способен оценить в отдельности амплитуду каждой из них. В радиоголографии и томографии разрешающая способность характеризует минимальные размеры деталей объекта, которые отображаются в изображении.
Для большинства систем формирования изображений оценка разрешающей способности представляет собой сложную и во многих случаях теоретически не решенную задачу. В связи с этим широкое распространение получили экспериментальные методы определения разрешающей способности, которые основаны на использовании тестовых объектов. Например, в телевидении для определения качества телевизионного изображения используют так называемые испытательные таблицы. В этих таблицах имеются участки, по которым определяют разрешающую способность. Эти участки представляют собой набор черных и белых полос различной ширины или полос в виде клина. Разрешающая способность при этом определяется как число отдельно различимых полос на единице длины.
Другим методом экспериментального определения разрешающей способности является получение изображения двух рядом расположенных точек и оценка их различимости по тем или иным критериям.
При теоретическом определении разрешающей способности фундаментальное значение имеет понятие функции рассеяние точки или просто функции рассеяния системы формирования изображений.
Под функцией рассеяния понимают распределение амплитуды в изображении точечного объекта, формируемого системой восстановления изображений. Рассмотрим суть этого понятия более подробно.
Пусть имеется некоторый объект, описываемый функцией s(x), непосредственное измерение которой невозможно по тем или иным причинам. Допустимо измерение некоторой другой функции f(x), связанной с функцией s(x) операторным уравнением
![]() .
.
При использовании для решения этой обратной задачи приближенного интегрального оператора R, получим решение
![]() .
.
Запишем полученное соотношение в интегральном виде
![]() ,
,
где функция
![]() -
ядро интегрального уравнения для прямого
оператора
-
ядро интегрального уравнения для прямого
оператора
![]() ,
а функция
,
а функция
![]() ядро
интегрального уравнения для приближенного
обратного оператора
ядро
интегрального уравнения для приближенного
обратного оператора
![]() .
.
Поменяем в уравнении порядок интегрирования. В результате получим
![]()
где
![]() .
.
Проведенные выше преобразования можно проиллюстрировать следующим рисунком.
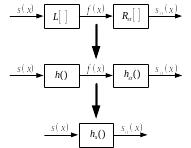
Из приведенного рисунка и выражения
следует, что функция
![]() представляет
собой импульсный отклик некоторой
линейной системы, связывающей между
собой точное изображение объекта
(функция
)
и восстановленное изображение объекта
(функция
представляет
собой импульсный отклик некоторой
линейной системы, связывающей между
собой точное изображение объекта
(функция
)
и восстановленное изображение объекта
(функция
![]() ).
По сути функция
описывает
каким образом искажается каждая отдельная
точка исходного изображения в процессе
восстановления. Из выражения следует,
что если
).
По сути функция
описывает
каким образом искажается каждая отдельная
точка исходного изображения в процессе
восстановления. Из выражения следует,
что если
![]() ,
то при восстановлении будет получено
точное изображение объекта. Таким
образом, чем меньше
отличается
от -функции, тем
более точным является алгоритм
восстановления.
,
то при восстановлении будет получено
точное изображение объекта. Таким
образом, чем меньше
отличается
от -функции, тем
более точным является алгоритм
восстановления.
Практически функция рассеяния характеризуется тремя основными параметрами:
шириной основного лепестка
уровнем боковых лепестков
скоростью затухания боковых лепестков