

8.2. Фрикционные передачи.
 Одной
из наиболее простых и во многих случаях
достаточно надёжной является фрикционная
передача, состоящая в простейшем случае
из двух колёс (катков), закреплённых на
ведущем и ведомом валах. Для передачи
движения без скольжения необходимо
приложить к одному из колёс силу Q,
достаточную для возникновения трения
в месте контакта (рис. 63), при этом
касательная сила их сцепления равна по
величине передаваемого окружному
усилию.
Одной
из наиболее простых и во многих случаях
достаточно надёжной является фрикционная
передача, состоящая в простейшем случае
из двух колёс (катков), закреплённых на
ведущем и ведомом валах. Для передачи
движения без скольжения необходимо
приложить к одному из колёс силу Q,
достаточную для возникновения трения
в месте контакта (рис. 63), при этом
касательная сила их сцепления равна по
величине передаваемого окружному
усилию.
Фрикционные передачи могут быть с постоянным и переменным передаточным отношением.
Последние называются вариаторами (рис. 64 а, б).
 рис. 64
рис. 64
Достоинствами фрикционных передач являются: плавность и бесшумность в работе, простота конструкции, невозможность поломки при резком изменении крутящего момента на одном из валов благодаря возможности проскальзывания катков, возможность бесступенчатого регулирования скоростей.
Недостатками являются: необходимость прижимного устройства, непостоянство передаточного отношения, невозможность передачи значительных крутящих моментов.
В связи с указанными недостатками фрикционные передачи не получили такого широкого распространения как зубчатые.
Фрикционные передачи.
Фрикционные передачи основаны на том, что в них используется сила сухого трения в качестве сил приводящих или тормозящих движение: фрикционные передачи, фрикционные муфты, тормозные регуляторы, фиксаторы ….
Классифицируют:
в зависимости от расположения осей валов: передачи с параллельными и пересекающимися осями.
По взаимному расположению поверхностей контакта: с внешними и внутренними.
По возможности варьирования передаточного отношения: нерегулируемые и регулируемые.
В
зависимости от наличия или отсутствия
промежуточных тел, осуществляющих
передачу движения от ведущего звена к
ведомому. Промежуточные тела в форме
гибкой связи, по типу которой и называют
передачи – ременные, пассиками…
Форма рабочего тела фрикционной передачи может быть цилиндрической а), коническойб), сферической…
в зависимости от назначения: силовые и кинематические передачи.
Передаточное
отношение фрикционной передачи i12 =
ω1/ω2 от 1..7 в пвапвап до 15 в сдвоенном
диапазоне измерения передаточное
отношение D = ω2max/ω2min = и2max/ и2min= 3..4 , до
16//---// υ – до 25м/с.
Достоинства: 1) легкость осуществления бесступенчатого регулирования частоты вращения выходного вала, 2) лёгкость включения и переключения, 3) бесшумность, 4) возможность самозащиты.
Расчёт фрикционных передач
Возникающая сила трения не меньше полярной окружной силы
FTP = f∙Fr => f∙Fr ≥ F , f – коэффициент трения.
Окружная сила определяется через момент полезного сопротивления М2 на ведомом звене f∙Fr ≥ 2М2/d2
Фрикционные передачи. Классификация фрикционных передач.
Фрикционная передача - механическая передача, служащая для передачи вращательного движения (или для преобразования вращательного движения в поступательное) между валами с помощью сил трения, возникающих между дисками, цилиндрами или конусами, насаженными на валы и прижимаемыми один к другому. Фрикционные передачи состоят из двух катков: ведущего и ведомого, которые прижимаются один к другому, так что сила трения в месте контакта катков достаточна для передачи окружного усилия.
Один каток к другому может быть прижат с помощью:
предварительно затянутых пружин (применяют в передачах, предназначенных для работы при небольших нагрузках);
гидроцилиндров (в случае передачи больших нагрузок);
собственной массы машины или узла;
перечисленных выше средств, через систему рычагов;
центробежной силы (в случае сложного движения катков в планетарных системах).
Фрикционные передачи классифицируются по следующим признакам:
1. По назначению:
с нерегулируемым передаточным числом;
с бесступенчатым регулированием передаточного числа (вариатор) без промежуточного звена и с промежуточным звеном.
2. По взаимному расположению осей и валов:
цилиндрические или конусные с параллельными осями;
конические и лобовые с пересекающимися осями;
торовые соосные.
3. В зависимости от условий работы:
открытые (работают всухую);
закрытые (работают в масляной ванне).
4. По принципу действия:
нереверсивные;
реверсивные.
Ремённая передача, механизм, осуществляющий передачу вращательного движения с помощью ремня, охватывающего закрепленные на валах шкивы. Ремень, являясь промежуточной гибкой связью, передаёт крутящий момент с ведущего шкива (рис.) на ведомый за счёт сил трения, возникающих между натянутым ремнем и шкивами. В зависимости от типа используемых ремней ременные передачи могут быть плоскоремёнными, клиноремёнными и круглоремёнными. Получают распространение ременные передачи с т. н. поликлиновыми ремнями, имеющими клиновые выступы на внутренней стороне. Плоские и круглые ремни используются, как правило, по одному в передаче, а клиновые — по несколько штук (обычно не более 6—8).
Плоскоремённые передачи просты и удобны, позволяют применять обычные шкивы с гладкой поверхностью, способны работать при высоких скоростях (40—50 м/сек и выше). Однако такие ременные передачи имеют невысокое тяговое усилие, значительные габариты и сравнительно малое передаточное отношение (обычно до 5).
Клиноремённые передачи, обеспечивая повышенное сцепление ремней со шкивами, позволяют сократить межосевое расстояние, уменьшить размеры передачи и повысить передаточное отношение (до 10—15). Круглоремённые передачи используются редко, главным образом в приводах малой мощности (настольные станки, швейные машины и т. п.).
Достоинства ременных передач: конструктивная простота, относительно малая стоимость, способность передавать мощность на значительные расстояния (до 15 м и более), плавность и бесшумность работы, предохранение механизмов от перегрузки за счёт упругих свойств ремня и его способности пробуксовывать по шкивам. Недостатки ременных передач: короткий срок службы ремней, относительно большие размеры, высокая нагрузка на валы и подшипники, непостоянство передаточного отношения (из-за неизбежного проскальзывания ремня). Получают распространение ремни из высокоэластичных и прочных синтетических материалов, узкоклиновые и зубчатые ремни. Ременные передачи распространены в приводах сельско-хозяйственных машин, электрогенераторов, некоторых станков, текстильных и других машин. Ременные передачи применяют обычно для передачи мощности до 30—50 квт. Известны установки мощностью в несколько сотен и даже тысяч кВт, в которых также использованы ременные передачи.
Рычажные механизмы.
Плоские
и пространственные рычажные механизмы
применяют для передачи и преобразования
движений, перемещений, скоростей, силовых
воздействий и для выполнения простейших
математических операций.
масса
рычаг
пружина
зубчатый сектор
зубчатое колесо
указатель
шкала
Деформация тарированной пружины служит мерой ускорения. Подвижные звенья выполняют в виде стержней, рычагов, планок, соединенных кинематическими парами (шарнирами, опорными узлами). Объединяющим звеном может служить корпус, кронштейн.
Достоинства: простота конструкции, надёжность, малые габариты.
Недостатки: ограничитель угловых и линейных перемещений.
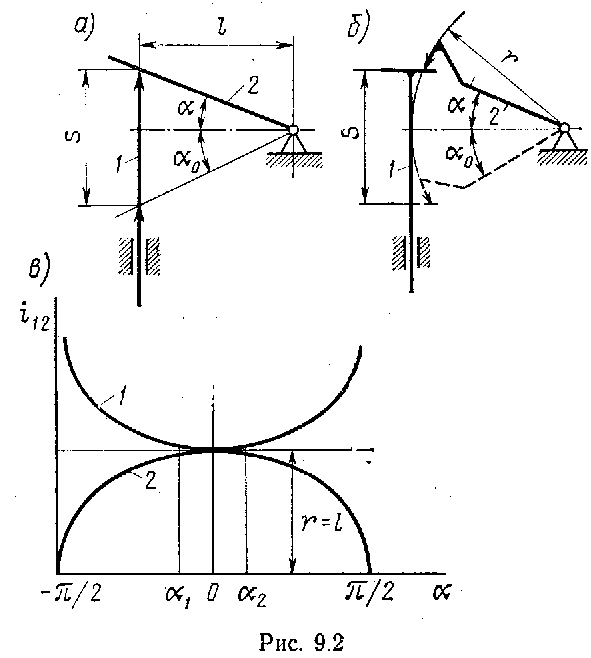
Тангенсный и синусный механизмы.
Тангенсный и синусный механизмы служат для преобразования прямолинейных перемещения S толкателя 1 в поворотное перемещение α рычага 2.
В тангенсном механизме расстояние l от оси вращения рычага до толкателя постоянное и S=l*(tgα – tgα0 ), передаточное отношение i12 = dS/dα = P/cos2α.
В синусном механизме длина рычага r неизменна. Характеристика механизма S= r∙(sinα – sinα0). Перед передаточное отношение i12 = dS/dα = r∙cosα.
График передаточных отношений тангенсного (1), синусного (2) механизмов. (r = L).
Поводковый механизм.
Предназначен для передачи вращения между расположенными под углом осями 1 и 2.

Характеристикой механизма является зависимость β поворота оси 2 от угла α поворота оси 1.
S = OK = L1∙tg α = L2∙tg β

Отсюда
i12 =
 ,
,
 =>
=>
i12
=
 =
=
 =
=

Рычажный механизм.
Рычажный механизм, механизм, состоящий из звеньев, соединённых между собой в низшие кинематические пары. Р. м. бывают плоские и пространственные. В плоских Р. м. звенья соприкасаются по окружности (шарниры, вращательные пары) и по линии (поступательные пары). В пространственном Р. м. звенья соединяются по цилиндрическим или сферическим поверхностям (вращательные пары) и по плоскости (поступательные пары). Часто в технической литературе Р. м. называют стержневыми шарнирными механизмами. К ним относят также кулисные и кривошипно-ползунные механизмы. Р. м. проще в изготовлении, прочнее и более износостойки, чем кулачковые и зубчатые механизмы, поэтому Р. м. применяют для передачи больших усилий в прессах, ковочных машинах, двигателях внутреннего сгорания, погрузчиках и т. п. Кинематическая пара, подвижное сопряжение двух твёрдых звеньев, налагающее ограничения на их относительное движение условиями связи. Каждое из условий связи устраняет одну степень свободы, то есть возможность одного из 6 независимых относительных движений в пространстве. В прямоугольной системе координат возможно 3 поступательных движения (в направлении 3 осей координат) и 3 вращательных (вокруг этих осей). По числу условий связи S К. п. делятся на 5 классов. Число степеней свободы К. п. W=6 —S. Внутри каждого класса К. п. делятся на виды по оставшимся возможным относительным движениям звеньев. По характеру соприкосновения звеньев выделяют низшие К. п. — с контактом по поверхностям, и высшие — с контактом по линиям или в точках. Высшие К. п. возможны всех 5 классов и многих видов; низшие — только 3 классов и 6 видов. Различают также геометрически замкнутые и незамкнутые К. п. В первых постоянное соприкосновение поверхностей обеспечивается формой их элементов (например, все К. п. , во вторых — для замыкания требуется прижимающая сила, т. н. силовое замыкание (например, в кулачковом механизме). Условно к К. п. относят некоторые подвижные сопряжения с несколькими промежуточными телами качения (например, шарико- и роликоподшипники) и с промежуточными деформируемыми элементами (например, так называемые безлюфтовые шарниры приборов с плоскими пружинами. Механизм (от греч. mechane — машина), система тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения др. тел. М. составляют основу большинства машин, применяются во многих приборах, аппаратах и технических устройствах. Твёрдое тело, входящее в состав М., называемое звеном, может состоять из одной или нескольких неподвижно соединённых деталей (отдельно изготовленных частей). Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой. Наиболее распространённые кинематической пары: вращательная (шарнир), поступательная (ползун и направляющая), винтовая (винт и гайка), сферическая (шаровой шарнир). Если в преобразовании движения, кроме твёрдых тел (звеньев), участвуют жидкие или газообразные тела, то М. называют соответственно гидравлическим или пневматическим. Для изучения движения звеньев М. составляется кинематическая схема, на которой указываются данные, необходимые для определения положения звеньев. На кинематической схеме кривошип и шатун условно представлены в виде отрезков, соединяющих центры шарниров, ползун — в виде прямоугольника, стойка О — в виде отрезка со штриховкой, изображающего направляющую ползуна, и треугольника с шарниром, имеющим неподвижную ось вращения. Для определения по кинематической схеме положения всех подвижных звеньев М. достаточно знать положение одного звена. Звено, положение которого для любого момента времени задано, называют начальным. При исследовании М. число начальных звеньев должно совпадать с числом его степеней свободы, т. е. с числом независимых переменных, определяющих положения всех звеньев. М. двигателя внутреннего сгорания имеет одну степень свободы; в качестве независимой переменной для М. можно принять угол j. В шарнирном М. с двумя степенями свободы,независимыми переменными могут быть углы j1 и j2, или j1 и j3, или, наконец, j2 и j3. М. применяется в тех случаях, когда нельзя получить непосредственно требуемое движение тел и возникает необходимость в преобразовании движения. Например, ротор электродвигателя и подшипники, в которых он вращается, не образуют М., т. к. в этом случае электроэнергия непосредственно преобразуется в требуемое движение без какого-либо промежуточного преобразования механического движения. М. появляется только тогда, когда требуется уменьшить угловую скорость выходного вала, т. е. устанавливается понижающая зубчатая передача. М. двигателя внутреннего сгорания преобразует прямолинейное движение поршня во вращательном движение коленчатого вала. М., предназначенный для преобразования вращательных или прямолинейных движений во вращательные (и наоборот), называется передаточным М., или передачей. В зависимости от вида звеньев различают зубчатые, рычажные, фрикционные, цепные, ремённые передачи. К этому же типу М. относятся гидро- и пневмопередачи. М., служащий для воспроизведения движения некоторой точки по заданной траектории, называется направляющим. Наибольшее распространение имеют М., воспроизводящие движение по прямой линии (прямолинейно-направляющие) и по дуге окружности (круговые направляющие). М., предназначенные для сложного перемещения твёрдого тела в пространстве или в плоскости, называются перемещающими. В 60 — начале 70-х гг. 20 в. появились новые М., созданные для выполнения задач, связанных с космической техникой (М. для передачи вращения в вакууме, М. пространственной ориентации), медицинской техники (регулируемые аппараты, биопротезы), для работы в средах, недоступных или опасных для человека (подводные глубины, космос, атомные реакторы). Для выполнения этих работ нашли применение манипуляторы, основу которых составляют пространственные М. со многими степенями свободы. Развитие манипуляторов привело к созданию промышленных роботов, позволяющих автоматизировать процессы обработки, монтажа и сборки изделий. См. также Машин и механизмов теория.
Валы
и оси для
установки и крепления на
них вращ. деталей. Оси не передают вращ.
момента и не испытывают кручения. Они
могут быть нагружены изгиб. моментами
и прод. силами.При работе вал испытывает
изгиб и кручение(растяжение и сжатие) 
Различают валы: прямые,коленчатые,гибкие.
Прямые-широкое распространение.Коленчатые-ля преобразования возвратно-поступат. во вращат. или наоборот.Гибкие-несколько плотно навитых слоев стальной проволоки (для передачи вращ.моментов м/у приборами) Для обеспечения равнопрочности по длине валы и оси выполняют ступенчатыми.
Участки валаили оси, соприкасающиеся с опорами(подшипникикачения или скольжения), называют цапфами. Цапфы передающие радиальную нагрузку оси вала-шипы, осевую-ноты. Валы и оси выполняют из конструкц. и легированных сталей. По форме пяты: а)сплошные б)кольцевые в)сферические)

Валом называется деталь, предназначенная для поддержания вращающихся частей машины непосредственно участвующих в передаче вращающего движения и передающая крутящий момент. Ось предназначена для поддержания вращающихся частей, в передаче энергии непосредственно не участвует. Валы передают крутящий момент, а оси нет. На валах и осях размещают вращающиеся детали: зубчатые колеса, шкивы, барабаны, звездочки, полумуфты и т.д.
Отличие вала от оси: вал всегда вращается, а ось не всегда вращается. Вал передает вращающий момент, а ось не передает вращающий момент. Классификация валов: прямые, коленчатые и гибкие. Наибольшее применение имеют прямые валы. По конструкции различают валы и оси: гладкие, фасонные (ступенчатые), полые. По форме и конструкционным признакам различают валы и оси: постоянного переменного сечения, ступенчато-переменного сечения, с фланцами, валы-шестерни, валы-червяки.
На нашем предприятии освоено производство валов и осей гладких и фасонных. Чтобы соблюсти точность, мы изготавливаем валов и осей на станках с ЧПУ, а для твердости применяем термообработку, необходимая точность достигается шлифовкой.
Для поддержания вращающихся деталей шкивов, блоков, зубчатых колес, звездочек, катков и т. п. служат валы и оси. По конструкции валы и оси мало отличаются между собой, но характер их работы существенно различен:
Оси поддерживают вращающиеся детали и, следовательно, воо| принимают изгибающие нагрузки от массы деталей и нагрузок, при| ложенных к ним;
Валы представляют собой звенья механизма, передающие крутящий момент, и, следовательно, кроме изгиба от усилий, возникаю щих в передачах, массы посаженных на вал деталей и собственной мае сы испытывают кручение.
Оси по условиям работы могут быть неподвижными или вращаю щимися вместе с посаженными на них деталями (блоки грузоподъеы ных машин, вагонные колеса); валы при работе механизма всегда вращаются.
Нагрузки, воспринимаемые осями и валами, передаются на корщ са или станины машин через опорные устройства подшипники. Пи роду трения все подшипники разделяются на подшипники скольженп и подшипники качения.
Части валов и осей, непосредственно соприкасающиеся о подшипниками, носят общее название -цапфы.
Цапфа, передающая на опорурадиальную нагрузку и расположенная на конце вала, называется шипом, а промежуточные цапфы называются шейками. Часть вала, передающая опоре осевую нагрузку, называется, пятой, а опора скольжения, воспринимающая эту осевую нагрузку, подпятником .
Оси могут быть укреплены в опорах неподвижно. При этом посаженные на ось детали вращаются свободно. Такая ось испытывает изгиб с напряжением, изменяющимся только по величине. Применяют такую ось, например, для подвесного блока. Ось может вращаться вместе с закрепленной на ней деталью. В этом случае ось испытывает изгиб с напряжением, изменяющимся по симметричному циклу, например ось железнодорожного вагона.
Оси всегда прямые, а валы бывают прямые, коленчатые и гибкие.
По конструкции валы и оси бывают гладкими , ступенчатыми сплошными и пустотелыми.
Для посадки зубчатых колес, шкивов, муфт, подшипников на валах н осях предусматривают соответствующие цилиндрические или конические участки определенного диаметра и длины, а для фиксации указанных деталей в осевом направлении валы снабжают упорными буртиками, резьбой для закрепления детали, гайкой и т. п. Для передачи налами крутящего момента используют шпоночные, шлицевые, штифтовые соединения, которые также влияют на конструкцию вала.
Чаще применяют сплошные валы и оси. В тех случаях, когда необходимо снизить массу деталей или когда надо через вал пропустить другую деталь, например тягу, валы и оси делают полыми.
Опорные части валов и вращающихся осей. Шипы выполняют с одним или двумя заплечиками, ограничивающими перемещение вала в одном или двух направлениях. Эти заплечики воспринимают небольшие осевые нагрузки .
Классификация валов и осей.
1. По форме геометрической оси бывают:
а) прямые (фасонные)
б) коленчатые
в) гибкие
2. По конструк.? прямые валы и оси бывают:
а) гладкие
б) ступеньчатые
3. По типу сечения валы и оси бывают:
а) сплошные
б) полые
Вращающиеся или качающиеся детали механизмов устанавливают на валах или осях, которые центрируют эти детали относительно оси вращения или качения.
Вал поддерживает сидящие на нем детали и передает крутящий момент. При работе вал испытывает изгиб и кручение, а в отдельных случаях дополнительно растяжение и сжатие (вал, на котором сидит червячное колесо).
Ось только поддерживает сидящие на ней детали. В отличие от вала оно не передает крутящий момент. Ось испытывает в основном изгиб, иногда изгиб и сжатие. Оси бывают вращающиеся и неподвижные. Валы всегда вращающиеся.
Опоры это устройства, поддерживающие валы и оси в заданном положении.
Цанфа это часть вала или оси, охватываемая опорой. Они делятся на:
а) шипы;
б) шейка;
в) пяты;
Шип это цанфа, расположенная на конце вала.
Шейка это цанфа, расположенная в средней части вала или оси.
Форма шипов и шеек может быть цилиндрической, конической и сферической.
При действии осевых нагрузок цанфы называются пятами, а подшипники подпятниками.
По форме пяты бывают:
1) сплошные 2) кольцевые 3) гребенчатые
13.2. Материалы валов и осей, требования к валам и осям.
Основными материалами валов являются стали: качественные конструкционные углеродистые марок 20, 30, 40, 50. Инструментальные марок У8А, У10А, легированные марок 2Х13, 4Х13, 15Х, 20Х, 40ХН, 30ХГСА. С целью упрочнения валы подвергают термообработке, как правило: термоулучшению. Для повышения износостойкости отдельных мест вала применяют закалку поверхности ТВ4.
На рабочем чертеже вала указывают шероховатость поверхности, вид покрытия и термической обработки, величины радиальных и торцевых биений посадочных поверхностей, при наличии зубьев приводят зуборезную таблицу в соответсвии с ГОСТом. Кроме того, на чертеже указывают основные технические требования.
Пример:
1) Поверхность зуба азотировать на глубину 0,05 ... 0,1 мм.
2) твердость азотированной поверхности HRC 56, остальных HB= 310 ... 340.
3) Поверхности, обозначенные Х, не азотировать.
4) Рабочую поверхность зуба притереть.
5) Неуказанные предельные отклонения размеров: отверстий по H12, валов h12, остальных IT14/2.
Для удобства сборки и равнопрочности валы изготавливают ступеньчатыми, с круглым поперечным сечением. Переход от одного диаметра ступени к другому выполняется по радиусу (галтель); для облегчения шлифования вместо галтели делают кольцевую проточку.
К конструкции валов предъявляют следующие основные технические требования:
1) обеспечение соосности посадочных мест;
2) отсутсвие некруглости, конусности и огранки у цилиндрических участков;
3) перпендикулярность опорных торцов;
4) необходимое качество поверхности, характеризуемое ее шероховатостью;
Соосность посадочных мест обеспечивается указанием допуска по СТСЭВ 636-76. Допуски на размеры и классы шероховатости на посадочные поверхности определяются выбранным квалитетом посадки. Для деталей, требующих точного проектирования на валу применяют переходные почадки по 7 и 8 квалитету. При этом передачу крутящего момента с вала на посаженную на него деталь осуществляют с помощью различных соединений (штифтовых, шпоночных, шлицевых). В малогабаритных редукторах производят фиксацию деталей штифтом, стопорным винтом, а также с помощью неподвижных насадок.
13.3. Расчет валов и осей на прочность.
Минимальный диаметр вала при его работе только на кручение (изгиб исключается путем понижения допускаемых напряжений)
d 3 ((Tк)р / 0,2[к])
где (Tк)р расчетное значение крутящего момента;
[к] = 30 ... 50 Мпа допускаемое напряжение на кручение, для среднеуглеродистых сталей пониженное за счет исключения изгиба;
Минимальный размер оси при ее работе на изгиб:
d 3 ((Mк)р / (0,1[к]r(1-c4)))
где (Mк)р расчетное значение изгибающего момента;
[к] допускаемое напряжение на изгиб для цикла r=0 или r=-1;
13.4. Расчет валов и осей на стойкость.
Жесткость вала при кручении оценивают углом закручивания на еденицу длины вала
= Tl(?)/GIp []
где G модуль упругости материала при сдвиге (для стали G = 8*104 Мпа)
Ip полярный момент инерции сечения вала
I = d4/32 0,1d4
[] допускаемый угол закручивания
[] = 5 ... 22*10-6 рад/мм
13.5. Параметры, характеризующие степень жесткости на изгиб осей и валов.
угол наклона поперечного
сечения вала или оси
ymax наибольший ? оси
или вала
Рассмотри наиболее распостраненную схему
yк = (Fa2b2) / (3EIxl) < [y]
где yк прогиб в точке действия изгибающей силы;
E модуль упругости материала оси или вала;
Ix осевой момент инерции сечения вала;
[y] допускаемый прогиб, обычно [y] = 2 ... 3*10-4 в;
Узлы поворота в точках
A = (Fab(l+b)) / (6EIl) [] B = (Fab(b+a)) / (6EIl) < []
F = (Fab(b-a)) / (3EIl) []
Угол поворота цапф на опорах с однородными подшипниками качения [] 0,005 рад. Угол наклона под зубчатыми колесами [] 0,001 рад.
При других схемах расположения опор и колес прогиб и угол поворота упругой линии вала определяются методами теории сопротивления материалов.
Ведется иногда в качестве проверочного расчета и расчет валов и осей на усталостную прочность, а также критическую скорость (возникают колебания валов). Но эти расчеты оговариваются в особых случаях, например высокооборотные валы, длинные валы и оси.