

Рычажные механизмы.
Плоские и пространственные рычажные механизмы применяют для передачи и преобразования движений, перемещений, скоростей, силовых воздействий и для выполнения простейших математических операций.

-
масса
-
рычаг
-
пружина
-
зубчатый сектор
-
зубчатое колесо
-
указатель
-
шкала
Деформация тарированной пружины служит мерой ускорения. Подвижные звенья выполняют в виде стержней, рычагов, планок, соединенных кинематическими парами (шарнирами, опорными узлами). Объединяющим звеном может служить корпус, кронштейн.
Достоинства: простота конструкции, надёжность, малые габариты.
Недостатки: ограничитель угловых и линейных перемещений.
Тангенсный и синусный механизмы.
Тангенсный и синусный механизмы служат для преобразования прямолинейных перемещения S толкателя 1 в поворотное перемещение α рычага 2.
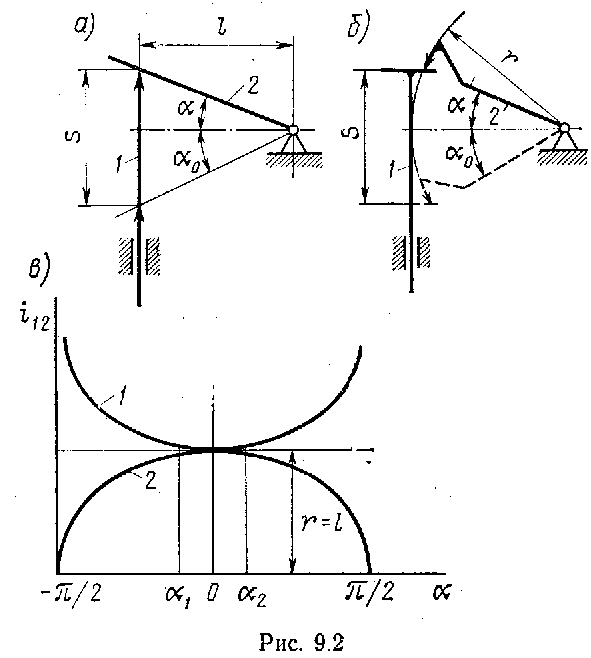
В тангенсном механизме расстояние l от оси вращения рычага до толкателя постоянное и S=l*(tgα – tgα0 ), передаточное отношение i12 = dS/dα = P/cos2α.
В синусном механизме длина рычага r неизменна. Характеристика механизма S= r∙(sinα – sinα0). Перед передаточное отношение i12 = dS/dα = r∙cosα.
График передаточных отношений тангенсного (1), синусного (2) механизмов. (r = L).
Поводковый механизм.
Предназначен для передачи вращения между расположенными под углом осями 1 и 2.

Характеристикой механизма является зависимость β поворота оси 2 от угла α поворота оси 1.
S = OK = L1∙tg α = L2∙tg β
![]()
Отсюда i12
=
 ,
,
![]() =>
=>
i12
=
 =
=
 =
=

График изменения передаточного отношения поводкового механизма:
Фиксирующие устройства. Зажимные устройства.
Обеспечивает неподвижное взаимное положение отдельных деталей механизма, что достигается благодаря трению. Трение между деталями 1 и 2, удерживающее установленное положение зажимного устройства, возникает под действием сил, создаваемых установочными винтами а), эксцентриком б), или хомутиком, стягиваемым винтом в).

Фиксаторы.
В отличие от зажимных устройств позволяют устанавливать детали механизмов в строго определённые, заранее фиксированные положения.
Фиксатор имеет подвижный и фиксированный элементы, которые вместе составляют фиксирующую пару. Подвижные элементы непосредственно связаны с перемещающими узлами, положение которых изменяют при переводе фиксатора из 1 положения в другое. Их выполняют в виде делительных дисков, звёздочек и т.д., впадины и отверстия которых используют для фиксации. Число позиций переключения и их расположение определяется местом и числом отверстий или впадин у подвижных элементов. Применяются как фиксаторы скольжения, так и с трением качения. Если фиксатор переводится из 1 положения в другое с приложением сил или моментов непосредственно к подвижной части и фиксированный элемент западают во впадину или отверстие под действием пружины, то фиксатор упругий. У жестких фиксаторов прежде чем перевести подвижный элемент в следующее положение, надо приложить усилие непосредственно к фиксирующему элементу для вывода его из впадины или отверстия.
Рассмотрим фиксатор с поступательно перемещающейся рейкой и штоком.
Н а
шток действует сила F
пружины, сила
а
шток действует сила F
пружины, сила
F1-выводящая фиксатор, действует горизонтально. F- препятствует выводу фиксатора. Fтр = f∙Fn - трение между рейкой и штоком.
F=
Fn∙cosα
– Fтр∙sinα
=>
![]()
![]()
![]()
F1~F и увеличивается с увеличением α и φ, с ростом α точность увеличивается по α не > 300, при поворачивании не более, чем на 150.