

4.1. Магнитный усилитель: принцип действия, характеристика управления.
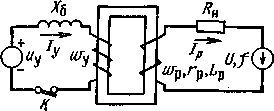
а) Принцип действия. Магнитный усилитель (МУ) — это электрический аппарат предназначенный для усиления электрического сигнала по току, напряжению или мощности. В схеме простейшего дроссельного МУ (ДМУ), называемого дросселем насыщения (рис. 6.1), используется управляемое, индуктивное сопротивление. Замкнутый магнито-провод изготавливается из материала с резко выраженной нелинейностью кривой намагничивания B=f(H). Рабочая обмотка переменного тока Wp включается в цепь нагрузки Rн- В обмотку управления wy подается управляющий постоянный ток Iу. При прохождении переменного тока по обмотке Wр на обмотке wy наводится ЭДС. Эта ЭДС будет создавать переменный ток в цепи управления, для ограничения которого включается балластный дроссель Хб.
Рис. 6.1. Дроссельный МУ на одном магнитопроводе.

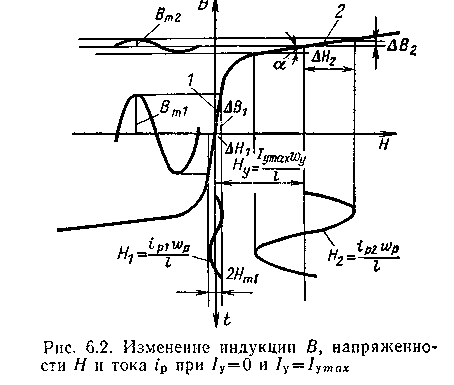
Подадим в обмотку управления такой постоянный ток управления Imax, чтобы рабочая зона перешла в область 2. В этой области насыщения материал имеет магнитную проницаемость мa2 = ∆B2/∆H2. Индуктивное сопротивление рабочей обмотки ХР2 резко уменьшается. Значения Хр2 и Rн выбираются так, что Хр2 <<Rн. Тогда ток в цепи определяется только сопротивлением нагрузки. При этом все напряжение источника питания приложено к сопротивлению нагрузки RH и активному сопротивлению rр рабочей обмотки wр:
![]()
существуют два крайних режима усилителя — режим холостого хода, когда Iу = 0 и ток в нагрузке имеет минимальное значение Iно, и режим максимального тока нагрузки. При плавном увеличении тока Iу ток нагрузки плавно увеличивается от Iно до максимального значения Iнmax за счет уменьшения магнитной проницаемости ма. Характеристика управления ДМУ приведена на рис. 6.3. По оси абсцисс отложен ток управления, приведенный к рабочей обмотке
I’y= IyWy/Wp. Идеальная характеристика управления 1 является прямой, идущей из начала координат под углом 45° к оси Iу. Реальная характеристика 2 отличается от идеальной наличием тока холостого хода /но и плавным переходом от линейной части характеристики к току Iнmax. В линейной зоне характеристики соблюдается равенство средних значений МДС
Ipwp = Iywy или Iр=Iу.(6.1
Равенство (6.1) не зависит от колебаний питающего напряжения, сопротивления нагрузки и частоты источника. Данному значению тока управления всегда соответствует единственное значение тока нагрузки Iн. Таким образом является управляемым источником тока.
4.2. Технические характеристики магнитных усилителей
Характеристикой управления МУС называется зависимость выходного напряжения от тока управления Uр(Iy ) или напряжения на нагрузке от тока управления Uн(Iy )
Крутизна характеристики управления
![]()
Производная д∆Ву/дНу. характеризует наклон кривой размагничивания магнитопровода МУС и условно может определяться эквивалентной магнитной проницаемостью размагничивания
мР=—д∆Ву/дНу.,Таким образом, kR~Xр wy/wp.
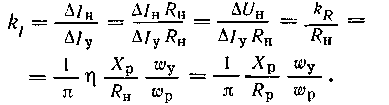
б) Коэффициент усиления МУС. Коэффициент усиления по току:
Коэффициент усиления по мощности
![]()
Коэффициент усиления по напряжению
![]()
Запаздывание. Под запаздыванием понимается выдержка времени между моментом скачкообразного изменения тока управления до момента появления тока нагрузки, соответствующего этому новому значению Iy в установившемся режиме.
Постоянная времени, добротность: Для оценки быстродействия МУС вводится понятие добротности D = kp/Ty.
Чем больше добротность D, тем меньше постоянная времени Ту и тем выше быстродействие МУС. Воспользовавшись (6.20), получим
![]()