

9.2 Тензодатчики: схема включения, вывод формулы чувствительности.
Тензодатчик,
измерительный
преобразователь
деформации твёрдого тела, вызываемой
механическими напряжениями, в сигнал
(обычно электрический), предназначенный
для последующей передачи, преобразования
и регистрации. Наибольшее распространение
получили Т. сопротивления, выполненные
на базе тензорезисторов (ТР), действие
которых основано на их свойстве изменять
под влиянием деформации (растяжения
или сжатия) своё электрическое
сопротивление (см. Тензорезистивный
эффект).
Конструктивно ТР представляет собой
либо решётку (рис.
1),
изготовленную из проволоки или фольги
(из константана, нихрома, различных
сплавов на основе Ni, Mo, Pt), либо пластинку
из полупроводника, например, Si. ТР
механически жестко соединяют (например,
приклеивают, приваривают) с упругим
элементом Т. (рис.
2) либо
крепят непосредственно на исследуемой
детали. Упругий элемент воспринимает
изменения исследуемого параметра х
(давления, деформации узла машины,
ускорения и т. п.) и преобразует их в
деформацию решётки (пластинки). При
деформации меняется сопротивление
тензорезистора и это формирует сигнал
рассогласования в плечах моста.
Чувствительность
![]() .
Для исключения температурной погрешности
и для повышения чувствительности
применяют дифференциальное включение
тензорезисторов в плечи моста.
.
Для исключения температурной погрешности
и для повышения чувствительности
применяют дифференциальное включение
тензорезисторов в плечи моста.
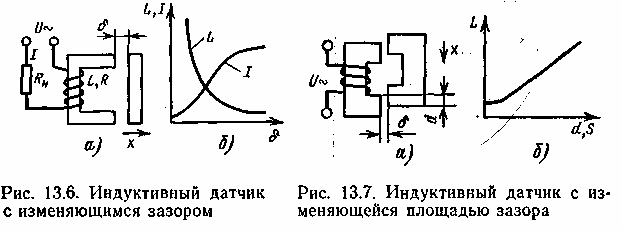
9.3 Индуктивный и индукционный датчики: принцип действия, область применения, отличия, схемы включения.
Индуктивность обмотки L и протекающий по ней ток I могут изменяться за счет изменения зазора б или его площади S. На рис. 13.6, а представлен датчик с изменяемым зазором б, а на рис. 13.7, а — с изменяемой площадью S зазора, пропорциональной координате перемещения d. Зависимость индуктивности и тока от зазора дана на рис. 13.6,6, а зависимость индуктивности от площади или координаты d — на рис. 13.7, б.
 Погрешности
индуктивных датчиков определяются
стабильностью напряжения и частоты
источника питания, влиянием температуры
на активное сопротивление обмотки и
размеры рабочего зазора.
Погрешности
индуктивных датчиков определяются
стабильностью напряжения и частоты
источника питания, влиянием температуры
на активное сопротивление обмотки и
размеры рабочего зазора.
 Чувствительность
индуктивного датчика при изменении
зазора.
Чувствительность
индуктивного датчика при изменении
зазора.![]()
при изменении площади
![]()
где lo — начальное значение индуктивности датчика
при б=бо и S=S0; 60, S0 — длина зазора и его площадь в начале хода;
∆б и ∆S — изменение зазора и площади.
Таким образом,
чувствительность Sδ является нелинейной
функцией ∆б. Для работы с малой
нелинейностью целесообразно выбирать
∆б/бо<=0,2. На якорь описанных выше
датчиков действует сила, создающая
механическую нагрузку на элемент,
перемещение которого контролируется.
Эта сила
![]()
Для устранения этого недостатка применяются дифференциальные датчики. Дифференциальный датчик содержит две совершенно одинаковые и симметрично расположенные электромагнитные системы.
Индукционные датчики.
Если изменяется потокосцеп-ление, связанное с проводником или катушкой, то в них возникает ЭДС. Это происходит при движении проводника в магнитном поле или магнитного поля, пересекающего неподвижный проводник. ЭДС индукции возникает и тогда, когда потокосцепление изменяется в результате изменения магнитной проводимости. Эти явления лежат в основе работы индукционных датчиков.
Индукционные датчики часто используются как датчики скорости. Если использовать дифференцирующие и интегрирующие цепочки, то можно получить выходные величины, пропорциональные ускорению и перемещению.
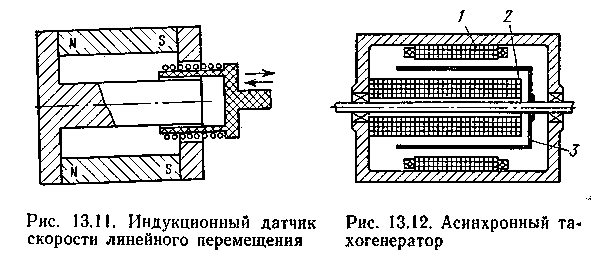
Простейший индукционный датчик скорости линейного перемещения показан на рис. 13.11. Выходной сигнал снимается с обмотки, в которой наводится ЭДС E=Blwv, где В — индукция, создаваемая в рабочем зазоре кольцевым постоянным магнитом; Тл; l — длина витка перемещающейся измерительной обмотки, м; w — число витков; и — скорость перемещения измерительной обмотки, м/с. Чувствительность датчика S=Blw может быть увеличена за счет увеличения индукции и числа витков. Для получения сигнала, пропорционального перемещению, сигнал с обмотки интегрируется с помощью цепочки RC. При интегрировании с малой погрешностью постоянная времени T=RC берется/ достаточно большой и сигнал уменьшается в сотни раз.