

13.2. Системы сбора информации с датчиков на базе микроЭвм
Для автоматизированного сбора и обработки электрических сигналов, поступающих с различного рода датчиков (температуры, давления, частоты вращения, счетчиков количества жидкости или газа, вибрации и т.п.) широко используются компьютерные системы, оснащенные преобразователями таких сигналов в цифровую форму (АЦП, таймерами/счетчиками, коммутаторами и др.)- информационно-вычислительные системы ( ИВС ).
Обобщённый алгоритм (рис. 13.3.) ИВС представляет совокупность функционально связанных между собой частных алгоритмов, реализующих единую задачу обработки информации с требуемой точностью. Основными особенностями ИВС является использование в них методов цифровой обработки информации, оптимальных алгоритмов оценивания измеряемых процессов.
Эти системы конструируются на базе одноплатных микроЭВМ, наиболее совершенными из которых на настоящее время являются так называемые микроPC. В состав микроPC входит материнская плата IBM-совместимого компьютера, уменьшенная в несколько раз, оснащенная современным мощным и быстродействующим процессором X86. С материнской платой сопрягается плата, предназначенная для сбора сигналов с датчиков, которые удалены от компьютера.
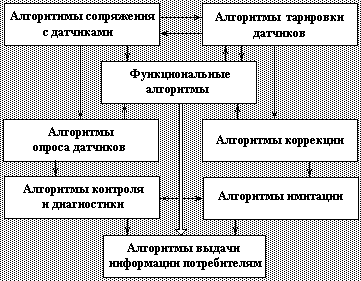
Рисунок 13.3 – Обобщенный алгоритм ИВС.
С компьютером микроPC обычно сопрягается с помощью какого-либо последовательного интерфейса. Удаленные системы сбора на базе одноплатных микроPC не лишены недостатков, одним из которых является очень высокая стоимость самой микроPC (как минимум равная стоимости стандартного IBM-совместимого компьютера, а подчас в несколько раз больше).
Применение таких удаленных систем целесообразно лишь в случае сбора сигналов с очень большого количества датчиков (100 и более), когда требуется высокоскоростная обработка поступающих сигналов. В случае, когда сигналов немного - десятки или даже единицы, применять системы на базе микроPC нецелесообразно. С другой стороны, существует масса задач, где как раз и требуется именно удаленная компьютерная система сбора сигналов с небольшого количества датчиков. Здесь на помощь приходят однокристальные микроЭВМ.
Однокристальные микроЭВМ - микрокомпьютеры, расположенные в одной микросхеме. В состав такой микроЭВМ входят основные атрибуты компьютера - память, процессор, различные периферийные устройства, интерфейсы (например, для связи с другим компьютером). В последнее время в такую микросхему стали встраивать даже многие атрибуты систем сбора (АЦП, счетчики и генераторы импульсов, параллельные и последовательные порты и др.). Стоимость однокристальных микроЭВМ невысокая. Они не обладают такими колоссальными быстродействием и памятью, как микроPC, но это от них и не требуется.
Применение однокристальных микроЭВМ в удаленных системах сбора сигналов с небольшого количества датчиков наиболее целесообразно и оптимально.
Основная идея применения однокристальных микроЭВМ в удаленных системах сбора заключается в том, что программа их работы передается в нее из компьютера по последовательному интерфейсу (кабелю), а результаты работы этой программы передаются в компьютер по этому же кабелю и полноценно обрабатываются компьютером. Удаление системы сбора от компьютера может достигать десятков и даже сотен метров; при этом, поскольку передача информации осуществляется в цифровом виде, потерь информации нет. Структурная блок-схема подобной системы приведена на рис.16.4. Основой системы является устройство сбора и предварительной обработки аналоговых и частотных сигналов, к которому подсоединяются кабели от датчиков, и которое сопрягается с компьютером с помощью оптронной развязки на максимальное пробивное напряжение до 3000 вольт. В устройстве применяется однокристальный микроконтроллер со встроенным АЦП. Устройство содержит внешнюю память программ и данных.
Отличительная особенность системы сбора - ее программируемость, т.е. возможность оперативного изменения программы однокристального микроконтроллера, которая передается из компьютера и записывается в память. Это позволяет приспосабливать устройство сбора к самым различным задачам (т.е. оно достаточно универсально). Программное обеспечение, написанное на компьютере, также может легко изменяться, и поэтому вся система сбора является исключительно гибкой в программном отношении и может использоваться для самых различных целей.
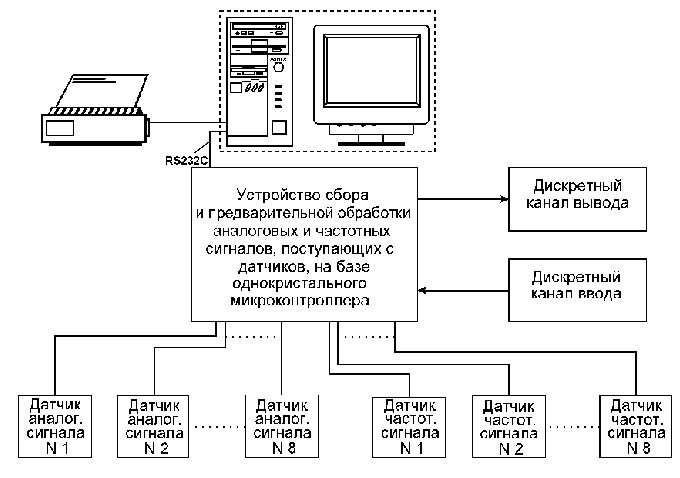
Рисунок 13.4 – Структурная блок-схема удаленной компьютерной системы измерения, регистрации и обработки сигналов.
Контрольные вопросы к главе 13.
Из каких устройств состоит микропроцессор?
Для чего необходимо устройство обмена?
Что такое регистр?
Что такое микропрограммное устройство управления?
Что такое шина данных?
Что такое шина команд?
Каким устройством осуществляется координация работы блоками микропроцессора?
Для чего предназначено устройство обработки?
Какие арифметико-логические операции с данными выполняет устройство обработки?
Для чего необходимо устройство сопряжения с каналом?
Какие группы регистров существуют в микропроцессоре?
Для чего необходимы регистры, предназначенные для временного хранения данных?
Для чего необходимы регистры сегментов памяти?
Что такое сегментный регистр начального адреса?
Что такое обобщенный алгоритм работы микропроцессора?
Для чего необходим аккумулятор микропроцессора?
Для чего используются микроРС?
Какими дополнительными элементами должны быть снабжены датчики для подачи их сигнала в микропроцессор?
Определите назначение интерфейса в системе сбора информации с датчиков?
Почему для удаленных систем сбора информации целесообразно применять однокристальные микропроцессорные средства?
Как вы понимаете гибкость микропроцессорной системы сбора информации?