

Стереокомпаратор
Стереокомпаратор – один из наиболее простых приборов, позволяющих осуществлять стереоизмерения. На рисунке 2 представлена его принципиальная схема.
Основные детали стереокомпаратора – подвижная каретка, на которой находятся два снимка стереопары, и зрительная система, которые могут перемещаться друг относительно друга. Движением каретки осуществляется изменение координаты x, движением зрительной системы осуществляется изменение координаты y. Изменение продольного p и поперечного q параллаксов осуществляется движением малой каретки, на которой закреплён второй снимок. Каретки двигаются при помощи специальных винтов, названия которых совпадают с названиями изменяемых ими величин. Отсчёты величин берутся по шкалам, соединённым с соответствующими винтами. Точность шкалы x составляет 0,02 мм, шкалы y – 0,02 мм, шкал p и q – 0,005 мм. Помимо этого, оба снимка могут вращаться вокруг центральной точки. Это позволяет привести в соответствие координатные системы снимков и координатную систему стереокомпаратора.
Визирование
в данном приборе осуществляется по
принципу мнимой марки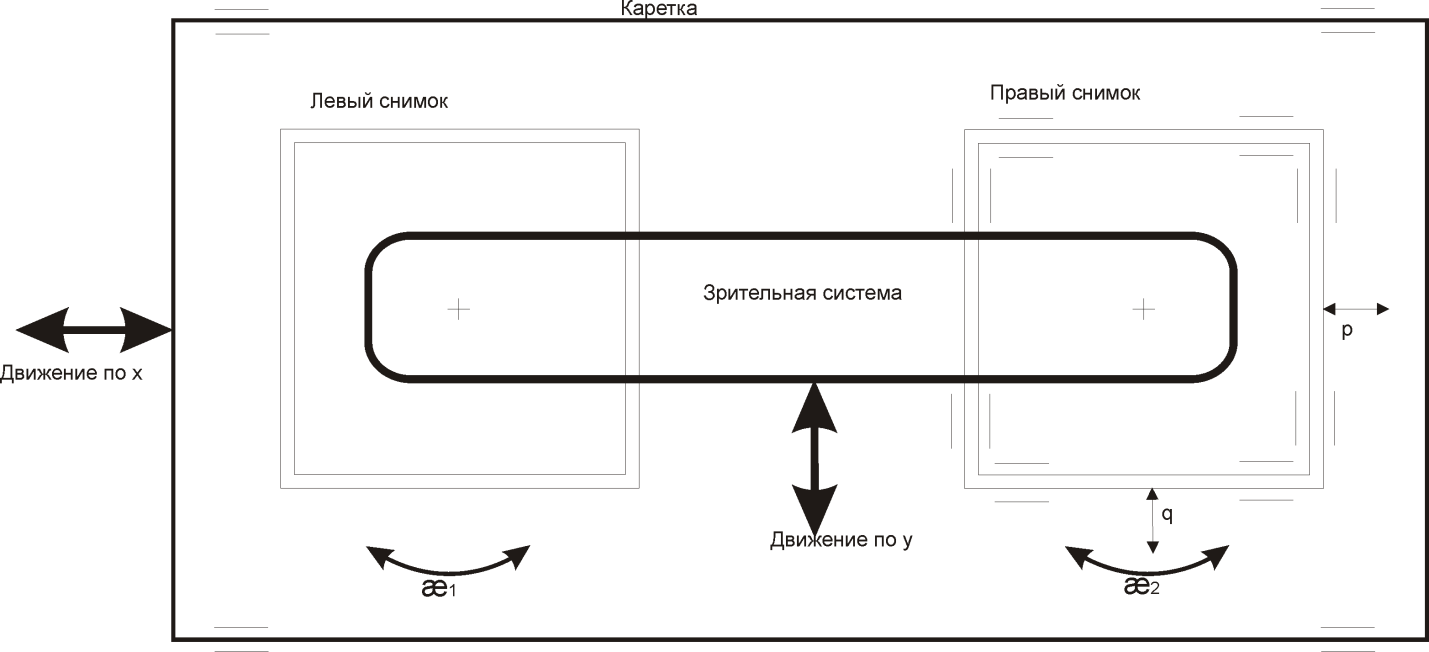
Рисунок 2. Принципиальная схема стереокомпаратора
Принцип мнимой марки
Существуют разные принципы стереоизмерений. В стереокомпараторе реализован принцип мнимой марки. Он заключается в том, что в обе оптические ветви вводятся одинаковые по форме реальные объекты (марки правильной геометрической формы). Когда обе марки установлены на идентичные точки правого и левого снимков, при стереоскопическом рассматривании они будут выглядеть как одна марка, «стоящая» на точке местности.


Рисунок 3. Принцип мнимой марки
Координаты и параллаксы точек стереопары
Положение точки на снимке задаётся в системе плоских прямоугольных координат (x и y).
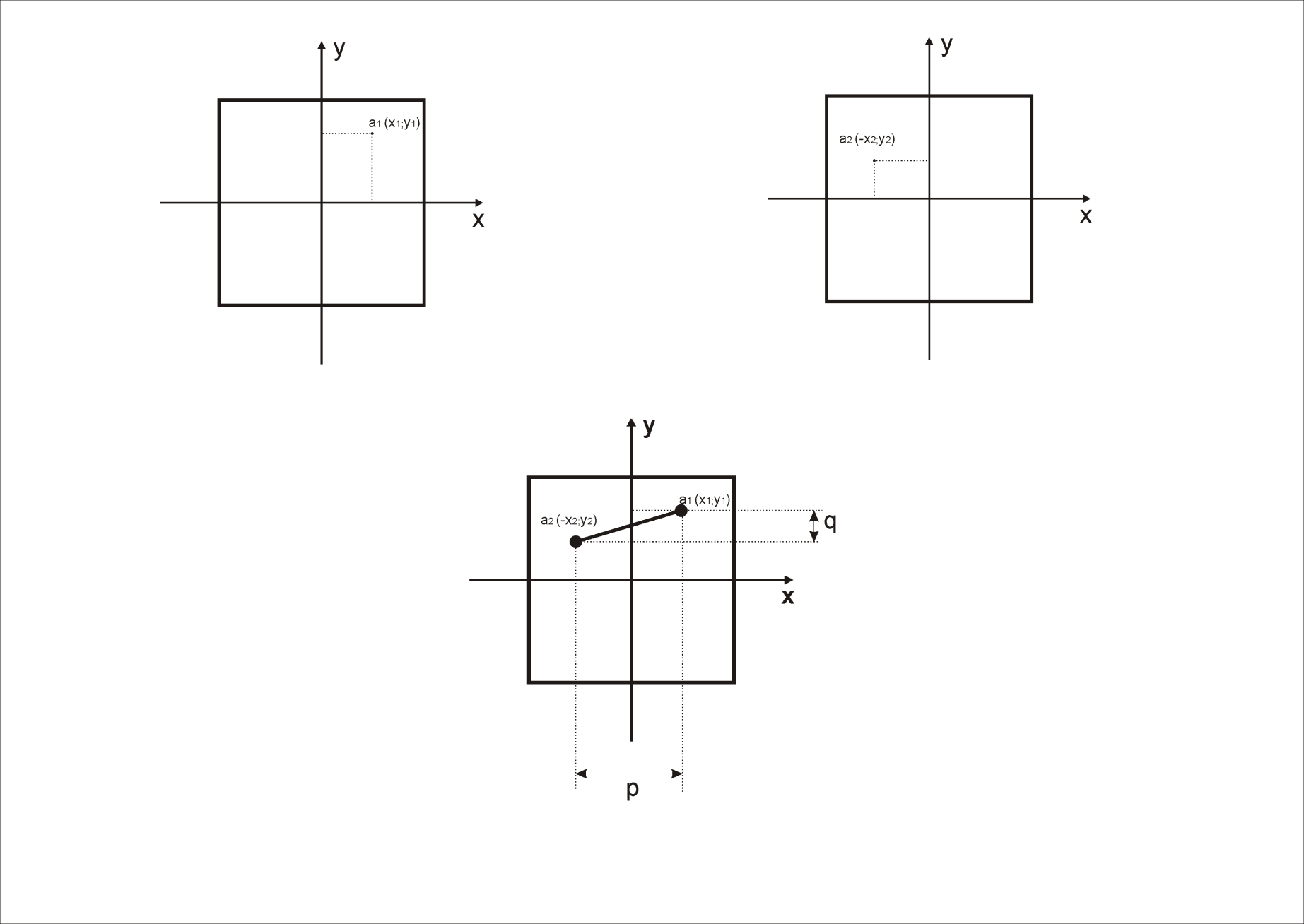
Рисунок 4. Координаты точек на стереопаре
Соответственные
точки – точки на снимках, являющиеся
проекцией одной и той же точки земной
поверхности. Пусть такими точками
являются точки a1
и a2
на рисунке 4. Если совместить снимки по
координатным меткам, получится картина,
изображённая на рисунке 5а. Величина p
= x1
– x2
называется продольным параллаксом.
Есть ещё величина q
= y1
– y2
(поперечный параллакс), но он не
используется в расчётах, поэтому от
него обычно избавляются, располагая
снимки таким образом, чтобы марки стояли
на одной горизонтальной линии. Марка,
соответствующая правому снимку, при
помощи винта q
устанавливается на одной линии с маркой,
соответствующей левому снимку. После
этого правый снимок сдвигается винтом
p
до тех пор, пока марки не совместятся
(рисунок 5б).

Рисунок 5а. Продольный и поперечный параллаксы
Рисунок 5б. Устранение поперечного параллакса
Идеальный случай съёмки. Вывод формулы превышений
В идеальном случае съёмки соблюдены следующие условия:
-
снимки расположены горизонтально
-
оси координат внутреннего ориентирования расположены параллельно базису фотографирования
-
снимки сделаны с одной и той же высоты
Общая схема
идеального случая съёмки представлена
на рис.
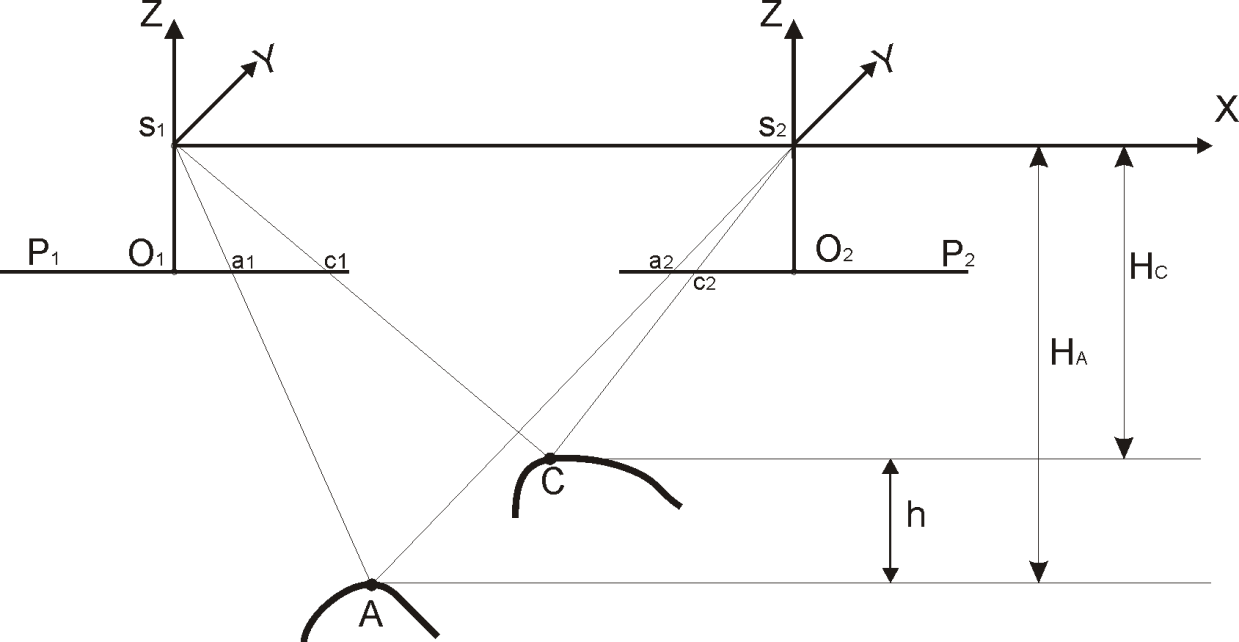
Рисунок 6. Идеальный случай съёмки
На рисунке: P1, P2 – сечения плоскостей снимков; A,C – точки на земной поверхности, a1,c1,a2,c2 – их проекции на плоскости снимков.
Начало внешней системы координат XYZ положим в левом конце базиса (S1S2), ось X совместим с базисом, ось Z – с главным лучом левой связки. При таком расположении снимков и системы координат угловые элементы внешнего ориентирования равны нулю.
Вектора, соединяющие центр проекции и точки на снимке и на местности, коллинеарны. Коэффициент пропорциональности между этими векторами:

Разность координат точек на снимках называют параллаксом.
Поэтому формула (1) перепишется в виде:

Из этой формулы, а также из известных координат проекций точек на снимках можно определить координаты точки на местности:
 Координата
Z
именуется отстоянием.
В данном случае съёмки она равна высоте
фотографирования (H),
взятой с обратным знаком, значит:
Координата
Z
именуется отстоянием.
В данном случае съёмки она равна высоте
фотографирования (H),
взятой с обратным знаком, значит:

Продольный параллакс равен базису фотографирования, выраженному в масштабе в данной точке. Точки местности, расположенные в одной горизонтальной плоскости, имеют одно и то же значение продольного параллакса. Следовательно, по разности продольных параллаксов можно определить разность высот точек на местности. Пусть параллакс точки A равен pA, параллакс точки C равен pC. Тогда:

Применять эту формулу будем в следующем виде:

Здесь H – высота фотографирования, b - пространственный базис стереопары, выраженный в масштабе снимков.