47. Синтез микропрограммного автомата Мили по граф-схеме алгоритма.
Обычно при проектировании различных устройств предварительно составляются так называемые содержательная граф-схема алгоритма (ГСА), в которой внутри условных и операторных вершин записаны не элементы множеств X и Y, а логические условия и микрооперации в содержательных терминах.
После
построения содержательной ГСА логические
условия и микрооперации кодируются
символами
![]() соответственно.
соответственно.
Пусть автомат Мили задан в виде ГСА. Для определения числа состояний автомата необходимо произвести разметку ГСА, которая выполняется в следующем порядке:
-
символом аО отмечается вход первой вершины, следующей за начальной, а также вход конечной вершины.
-
входы вершин, следующих за операторными вершинами, отмечаются символами а1, а2, и т.д.
-
входы двух различных вершин, за исключением конечной и первой, следующей за начальной, не могут быть отмечены одинаковыми символами.
-
не одна из вершин не отмечается двумя состояниями.
После разметки ГСА строится граф автомата Мили.
Закодировать состояния автомата можно следующим образом:
Для построения функций возбуждения и выходов используется структурная таблица, которая отчасти повторяет таблицу переходов, но содержит коды состояний и перечень сигналов возбуждения, формируемых на переходе (аn, аm). В столбце сигналов возбуждения указывается сигнал St, если триггер на переходе (аn, аm) переключается из состояния 0 в состояние 1, и сигнал Rt, если триггер переключается из состояния 1 в состояние 0 . Сигналом Tt триггеры переключаются по счётному выходу.
Таблица 1.Структурная таблица автомата Мили
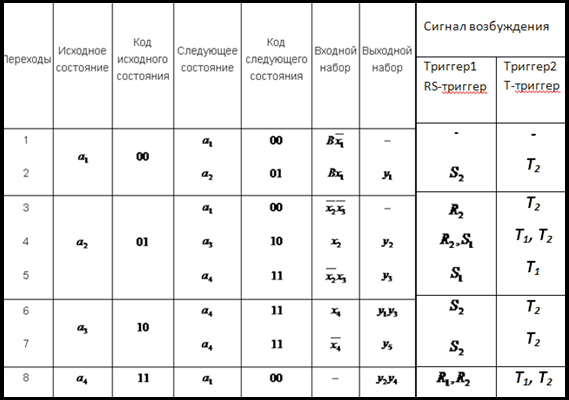
На основании таблицы 1 строится каноническая система функций выходов и возбуждения
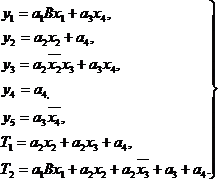
На основе систем булевых функций канонической системы строятся функциональные схемы автоматов Мили на RS- и T- триггерах.
СхемаструктурногоавтоматаМили:

48. Микропрограммируемый автомат Уилкса.
Уилкс предложил микропрограммную концепцию организации управления как средство систематизированного структурированного проектирования устройств управления компьютеров.
В основе идеи лежит тот факт, что для инициирования любой микрооперации достаточно сформировать сигнал управления на соответствующей линии управления, т.е. перевести такую линию в активное состояние. Это может быть представлено с помощью двоичных цифр 1 (активное состояние – есть сигнал управления) и 0 (пассивное состояние – нет сигнала управления). Для указания микроопераций, выполняемых в данном такте, можно сформировать управляющее слово, в котором каждый бит соответствует одной управляющей линии. Такое управляющее слово соответствует микрокоманде. Таким образом, микрокоманда может быть представлена управляющим словом со своей комбинацией нулей и единиц.
Последовательность микрокоманд, реализующих определенный машинный цикл, образует микропрограмму. В терминологии на английском языке микропрограмму часто называют firmware.
Микропрограммы для каждой команды компьютерной системы размещаются в специальном ЗУ, называемом памятью микропрограмм. Процесс формирования сигналов управления можно реализовать, последовательно (с каждым тактовым импульсом) извлекая микрокоманды микропрограммы из памяти и интерпретируя содержащуюся в них информацию о сигналах управления. Отличительней особенностью УУ с программируемой логикой является хранение микрокоманд в виде кодов в специализированном запоминающем устройстве – памяти микропрограмм. Каждой машинной команде в этом ЗУ в явной форме соответствует микропрограмма,поэтому такой метод управления называется микропрограммированием, а устройства управления с программируемой логикой называют микропрограммными.
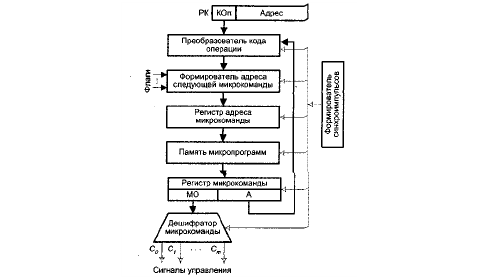
В общем виде устройство микропрограммного управления включает: память микропрограмм (РМП), регистр адреса микрокоманды (РAM), регистр микрокоманды (РМК), дешифратор микрокоманд (ДшМК), преобразователь кода операции, формирователь адреса следующеймикрокоманды Ф(АСМ), формирователь синхроимпульсов (ФСИ).
Запуск микропрограммы выполнения операции осуществляется путем передачи кода операции из РК на вход преобразователя, в котором код операции преобразуется в начальный адрес микропрограммы
Этот адрес поступает через ФАСМ в регистр адреса микрокоманды. Выбранная по адресу Ан из ПМП микрокоманда заносится в РМК. Каждая микрокоманда в общем случае содержит микрооперационную (МО) и адресную (А) части. Микрооперационная часть микрокоманды поступает на дешифратор микрокоманды, на выходе которого образуются управляющие сигналы Ci, инициирующие выполнение микроопераций в исполнительных устройствах и узлах системы. Адресная частьмикрокоманды подается в ФАСМ, где формируется адрес следующей микрокоманды Амк. Этот адрес может зависеть от адреса на выходе преобразователя кода операции Aн, адресной части текущей микрокоманды А и значений осведомительных сигналов (флагов) X, поступающих от исполнительных устройств. Сформированный адрес микрокоманды снова записывается в РАМ, и процесс повторяется до окончания микропрограммы. Разрядность адресной (RА) и микрооперационной (RМО) частей микрокоманды определяются из соотношений

где N МК – общее количество микрокоманд; NСУ – общее количество формируемых
сигналов управления.
В свою очередь,
необходимая емкость памяти микропрограмм
равна
![]()