

Значення коефіцієнту повздовжнього згину φ .
|
|
0
|
20
|
40
|
60
|
80
|
100
|
120
|
140
|
160
|
180
|
200
|
|
|
1,00
|
0,96
|
0,92
|
0,86
|
0,75
|
0,60
|
0,45
|
0,36
|
0,29
|
0.23
|
0,19
|
При визначенні поперечних розмірів з розрахунку на стійкість використовується розрахунок за коефіцієнтом . Розрахунок ведеться з врахуванням формули (10.9) методом послідовних наближень. З (10.9) випливає
![]() (10.10)
(10.10)
Процес обчислень проводиться в наступному порядку:
1. Вибирається значення 1=0.5÷0.6 і за формулою (10.10) визначається F.
2. Обчислюється радіус інерції imin і максимальна гнучкість max.
3. За max з таблиці визначається 2.
4.
Порівнюються 1
і 2
, вибирається 3
із проміжку між 1
та
2
наприклад
3![]() ).
).
5. Для 3 визначається F і процес повторюється доти, поки вихідне й остаточне не співпадуть(розбіжність менше 5 %).
Питання для самоперевірки
1. Що означає термін «стійкість»?
2. Що таке критична сила?
3. Як визначається критична сила в пружній стадії?
4. Що
таке гнучкість стержня?![]()
5. Яка область застосування формули Ейлера?
6. Що таке приведена довжина?
7. У яких випадках повинна застосовуватися формула Ясинського?
8. Які існують види розрахунку на стійкість?
9. Що таке коефіцієнт повздовжнього згину ?
10. Опишіть послідовність розрахунку за коефіцієнтом .
ПРИКЛАД 13. Підібрати розміри поперечного переріза стержня, стиснутого силою Р=1000 кН, якщо довжина стержня l=5 м, допустиме напруження при стиску [] =160 МПа, кінці стержня затиснені, а відношення сторін прямокутного поперечного переріза дорівнює b/а=2 (рис. 15). Знайти величину критичної сили і коефіцієнт запасу на стійкість.
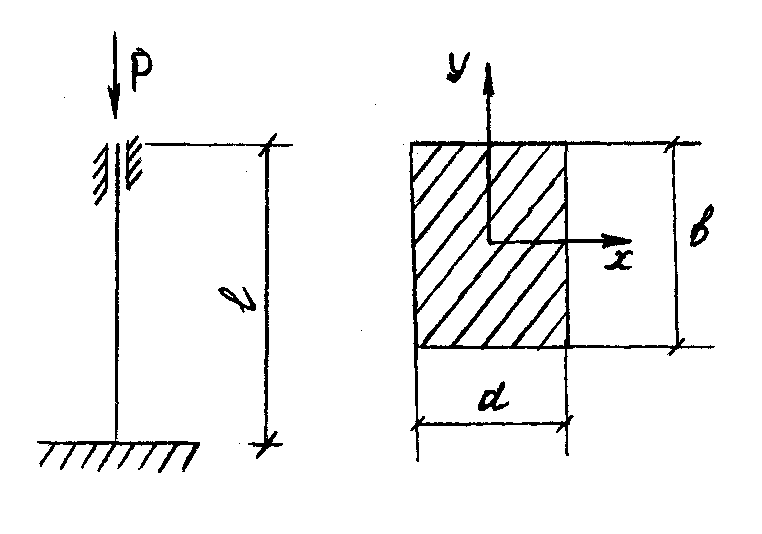
Рис. 15
Розвязання.
Розрахунок проводимо за коефіцієнтом
.
Приймаємо 1=0,5
і визначаємо необхідну площу перерізу
за формулою (10.10):
![]() .
.
При
цьому F=ab=2a2.
Отже,
![]() .
.
Мінімальний радіус інерції перерізу дорівнює
![]()
Тоді гнучкість дорівнює
![]()
За таблиці 5 знаходимо, що =0.52.
Приймаємо далі
![]() і повторюємо розрахунок
і повторюємо розрахунок
F=![]()
а=![]()
imin
=![]() ;
;
![]()
=0.51.
Отже, а = 78 мм, b = 2 . 7,8 = 156 мм.
Знайдемо величину критичної сили:
![]()
Коефіцієнт запасу на стійкість
![]()
Тема 11. Визначення переміщень у стержневих системах
ЛІТЕРАТУРА: 1, р. X; 2, р. IX, § 74—80; 3, р. V, § 36—39.
Питання визначення переміщень безпосередньо пов’язане із задачею розрахунку стержневих систем на жорсткість. Переміщення необхідно відрізняти від деформацій. Переміщення в точці К від дії силового фактора Р позначаються через кр, а відповідні одиничні переміщення при Р=1, прикладеної в j-му перетині, позначаються — kj. Варто усвідомити, що переміщення можна визначити енергетичним способом. Для цього попередньо варто розібратися з поняттям робіт - дійсної і побічної. Переміщення визначаються за універсальною формулою Мора. Якщо обмежитися випадком балок (і рам), то в загальній формулі можна опустити члени, що містять повздовжні і поперечні сили. В результаті для переміщень виходить формула
![]()
![]() (11.1)
(11.1)
Тут підсумовування
поширюється на всі ділянки стержневої
системи, на яких різні аналітичні вирази
згинних моментів від заданого навантаження
Мр і одиничної сили (моменту)
![]() ,
а також жорсткість на згин EI. Те ж можна
сказати і про другу формулу.
,
а також жорсткість на згин EI. Те ж можна
сказати і про другу формулу.
Визначення переміщень повинне проводитись в наступній послідовності.
1. У заданому перерізі балки (чи ділянці рами) по напрямку шуканого переміщення прикладається одинична сила, якщо потрібно визначити лінійне переміщення, або одиничний момент, якщо потрібно визначити кутове переміщення — кут повороту перерізу.
2. Для кожної ділянки
системи складають вирази для згинаючого
моменту Мр
(чи
![]() )
і
)
і
![]() ,
на підставі чого будують епюри Мр
(чи
,
на підставі чого будують епюри Мр
(чи
![]() )
і
)
і
![]() .
.
3. Одержані вирази підставляють у формулу Мора (11.1), розставляють межі і виконують інтегрування.
Для систем, що складаються з прямолінійних елементів, у яких жорсткість не змінюється, інтегрування може бути замінено множенням епюр способом Верещагіна. Вивід цього правила треба проробити за літературою, що рекомендується, і уяснити, що кінцевий вид формули Верещагіна буде наступний
![]() (11.2)
(11.2)
Тут j - площа нелінійної епюри згинних моментів, cj - ордината лінійної епюри згинних моментів, що відповідає центру ваги нелінійної (EIj – жорсткість на згин j-ї ділянки). Добуток jcj вважається додатнім, якщо частина епюри, що має площу Wj, розташована по ту ж сторону від осі бруса, що й ордината hcj. При застосуванні методу Мора значення шуканого переміщення вважається додатнім у випадку, якщо його напрямок збігається з напрямком одиничного силового фактора.
На закінчення вивчення цього розділу рекомендується познайомитися з теоремою про взаємність побічних робіт (теорема Бетті) і з теоремою про взаємність побічних переміщень (теорема Максвелла) (див. [З], р. V, § 41).
Приведемо формулювання цих теорем для випадку балки, завантаженої силою Р1, або Р2.