

БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ ФАКУЛЬТЕТ ИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ
КАФЕДРА УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
КУРСОВОЙ ПРОЕКТ
по дисциплине Локальные системы управления
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ХОДОМ ШАГАЮЩЕГО ЭКСКАВАТОРА
Выполнил ст. гр. УИТ-51 Колесникова Е.В.
Руководитель проекта к.т.н. Скоробогатова Т.Н.
2004
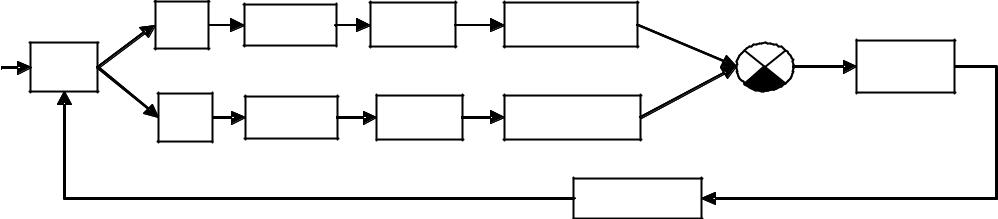
ФУНКЦИОНАЛЬНАЯ СХЕМА САУ ХОДОМ ШАГАЮЩЕГО ЭКСКАВАТОРА
UМП У |
U |
n |
p |
FГЦП |
ДВ |
Н |
ГЦП |
||
|
|
|
|
XТ |
МП |
U |
n |
p |
ТР |
|
|
|||
У |
ДВ |
Н |
|
FГЦТ |
|
|
|
|
•МП - микропроцессор со встроенными АЦП и ЦАП;
•У - усилитель;
•ДВ - двигатель;
•Н - насос постоянной производительности;
•ГЦП - главный (подъёмный) цилиндр;
•ГЦТ - вспомогательный (тяговый) цилиндр;
•ТР - траверса (горизонтальная балка);
•ДП - датчик перемещений.
UД |
ДП |
|
|
Технические характеристики шагающего |
|
экскаватора: |
|
Диаметр опорной базы, м |
|
14 |
Длина лыжи, м 16 |
|
|
Длина шага, м |
до 2 |
|
Скорость передвижения, м/с |
0,07 |
|
Средняя продолжительность рабочего цикла, c 65
Показатели качества ЛСАУ: |
|
|
Колебательность системы |
1.3 |
|
Перерегулирование, % |
35-60 |
|
Время регулирования, с |
20 |
|
Ошибка , м |
0,05 |
|
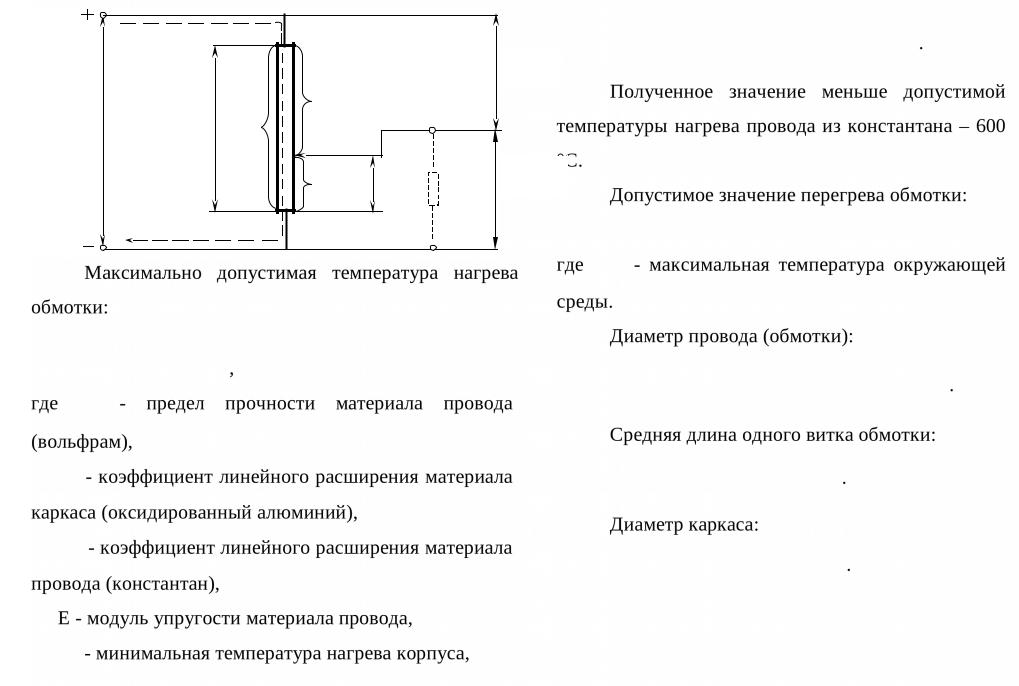
РАСЧЁТ ПОТЕНЦИОМЕТРИЧЕСКОГО ДАТЧИКА ПУТИ
|
I |
|
|
U2 |
|
|
|
|
|
Uп |
l |
R2 |
|
|
R |
|
|
||
|
|
|
|
|
|
|
R1 |
X |
Rн |
|
|
|
|
Uвых |
ПРОВЕРКА УСТОЙЧИВОСТИ СИСТЕМЫ
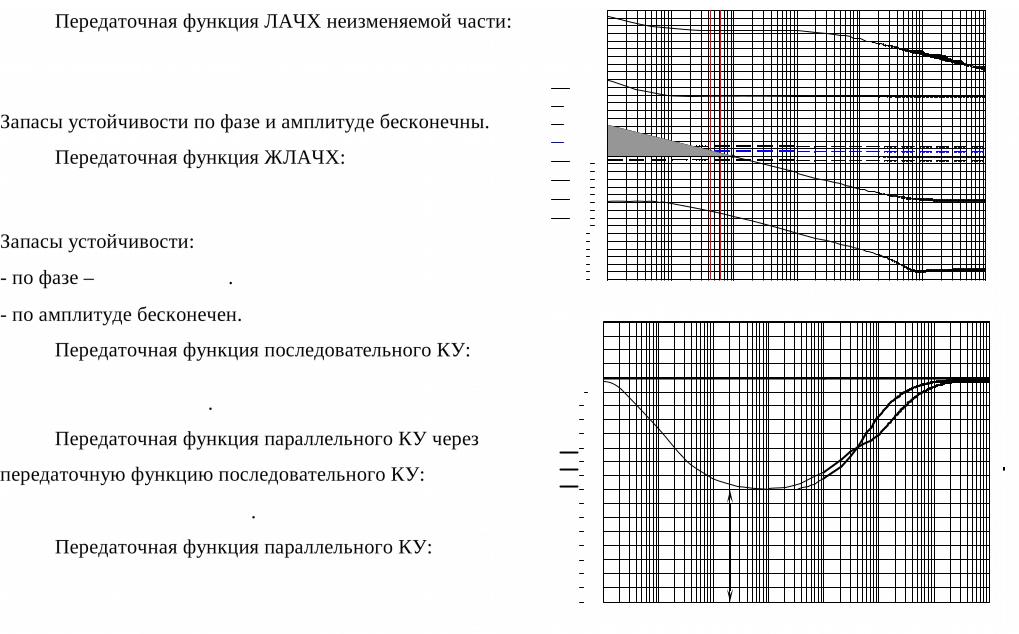
Ж 1.57 рад
ЛАЧХ, ЖЛАЧХ, ЛАЧХ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
|
190 |
190 |
|
|
|
|
|
|
|
|
|
|
180 |
|
|
|
|
|
|
|
|
|
|
|
|
170 |
|
ð ñð |
|
|
|
|
ЛАЧХ КУ |
|
|
|
|
160 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
150 |
|
|
|
|
|
|
|
|
|
|
|
140 |
|
|
|
|
|
|
|
|
|
|
|
130 |
|
|
|
|
|
|
|
|
|
|
|
120 |
|
|
|
|
|
|
|
|
|
L( ) |
|
110 |
|
|
|
|
|
|
ЛАЧХ К |
|
|
|
100 |
|
|
|
|
|
|
|
|
||
Lm_ |
|
90 |
|
|
|
|
|
|
|
|
|
|
80 |
|
|
|
|
|
|
|
|
|
|
|
|
70 |
|
|
|
|
|
|
|
|
|
Lm |
|
60 |
|
|
|
|
|
|
|
|
|
|
50 |
|
|
|
|
|
|
|
|
|
|
20 log( ) |
40 |
|
Р |
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|||
0 |
|
20 |
|
Т |
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
||
|
|
0 |
|
|
|
|
|
|
|
|
|
Læ( ) |
10 |
|
|
|
/ |
|
|
|
|
|
|
20 |
lр |
lср |
l ср |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||||
Lêó ( ) |
30 |
|
|
|
|
|
|
ЖЛАЧХ |
|
|
|
40 |
|
|
|
|
|
|
|
|
|||
|
|
50 |
|
|
|
|
|
|
|
|
|
Lê( ) |
|
60 |
|
|
|
|
|
|
|
|
|
|
70 |
|
|
|
|
|
|
|
|
|
|
|
|
80 |
|
|
|
|
|
|
|
|
|
|
|
90 |
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
110 |
|
|
|
|
|
|
ЛАЧХ |
|
|
|
|
120 |
|
|
|
|
|
|
|
|
|
|
|
130 |
|
|
|
|
|
|
|
|
|
|
|
140 |
|
|
|
|
|
|
|
|
|
|
160 |
150 |
|
|
|
|
|
|
|
|
|
160 |
|
|
|
|
|
|
3 |
|
4 |
||
|
|
0.01 |
0.1 |
|
1 |
|
10 |
100 |
|||
|
|
|
|
1 10 |
1 10 |
|
|||||
|
|
0.01 |
|
|
|
|
|
|
|
10000 |
|
0.25 0.79 |
|
|
|
|
|
|
|
|
|
0.59 |
|
|
|
|
|
|
|
|
0.39 |
|
|
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0.2 |
|
|
|
ЖЛФЧХ |
|
|
|
|
0.39 |
ЛФЧХ |
|
|
|
|
|
|
|
0.59 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.79 |
|
|
|
|
|
|
|
( ) 0.98 |
|
|
|
|
|
|
|
|
æ( ) 1.18 |
|
|
|
|
|
|
|
|
0 |
1.37 |
|
|
|
|
|
|
|
|
1.57 |
ЖЛФЧХ |
|
|
|
|
|
|
|
1.77 |
|
|
|
|
|
|
|
|
1.96 |
|
|
|
|
|
|
|
|
2.16 |
|
|
|
|
|
|
|
|
2.36 |
|
|
|
|
|
|
|
|
2.55 |
|
|
|
|
|
|
|
|
2.75 |
|
|
|
|
|
|
|
|
2.95 |
|
|
|
|
|
|
|
|
3.14 |
|
|
|
|
1 103 |
1 104 |
1 105 |
|
0.01 |
0.1 |
1 |
10 |
100 |
|||
|
0.01 |
|
|
|
|
|
|
100000 |
ПОДБОР И РАСЧЁТ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
|
КУ |
UКУ |
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
U |
|
p |
|
FГЦП |
|
|
У |
ДВ |
|
ГЦП |
|||
UМП |
|
|
Н |
XТ |
|||
|
|
|
|
|
|
||
МП |
|
|
|
|
|
|
ТР |
|
|
|
n |
|
|
|
|
UМП |
У |
U |
ДВ |
p |
|
|
|
|
Н |
ГЦТ |
FГЦТ |
||||
|
КУ |
UКУ |
|
|
UД |
ДП |
|
|
|
|
|
|
|
|

БЛОК-СХЕМА ПРОГРАММЫ КОРРЕКЦИИ
Начало
yK 1 0; yK 2 0;
xk 1 0; xK 2 0; xK 3 0
сигнала и
в Uk-1
x k 1
6 . 36 10 8 x K 3
1 y K 2
yk 1: yk
; x k 1 x k
яющего
Конец