

Курсовой проект
на тему
САУ поливальной машины
Руководитель проекта |
Выполнил ст.гр.УИТ |
Скоробогатова Т.Н. |
Головачева Ю.В. |
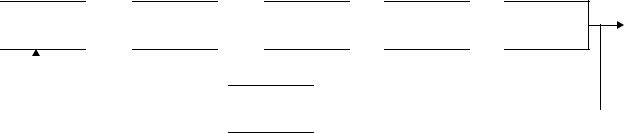
ФУНКЦИОНАЛЬНАЯ СХЕМА ПОЛИВАЛЬНОЙ МАШИНЫ

 МП
МП 
 У
У 
 ДВ
ДВ 
 Н
Н 
 Ф
Ф
 ДР
ДР 
 Параметры регулируемой системы:
Параметры регулируемой системы:
1.Мощность двигателя – 500 Вт;
2.Производительность насоса – 2 куба/час;
3.Максимальный интервал обновления данных
(период дискретности) |
T0 = 5 мин. |
4.Время регулирования tp 3000 c;
5.Колебательность n 2;
6.Перерегулирование 3 %;
Максимально допустимое отклонение регулируемой
величины в установившемся режиме 1%;
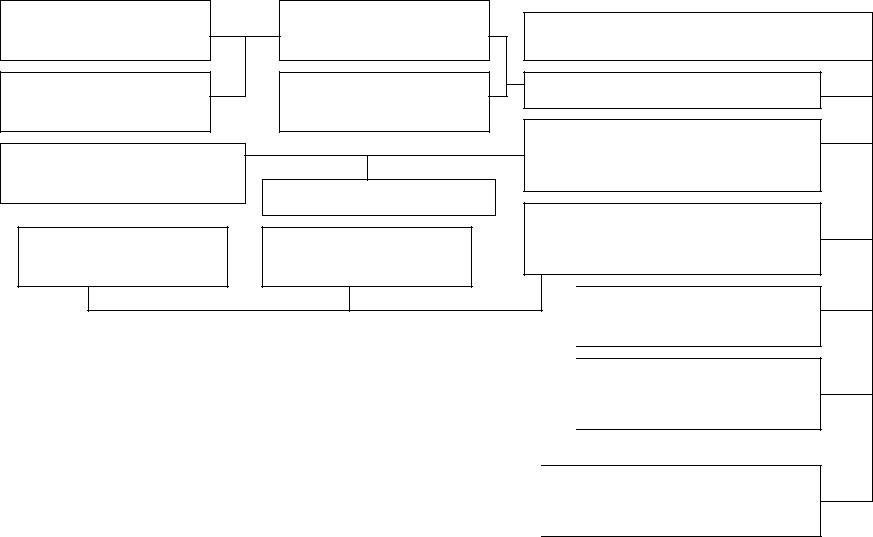
КЛАССИФИКАЦИЯ ДАТЧИКОВ РАСХОДА
Смеханическим
тахометром.
Сэлектромагнитным
тахометром
Скруговым сечением турбопровода.
Снепрерывной ионизацией
С тахометрическим измерителем оборотов
крыльчатки.
С электрическим измерителем оборотов
крыльчатки.
Спрямоугольным сечением турбопровода.
Симпульсной ионизацией
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С вращающейся Т-образной |
|
|
|
|
|
|
|
|
|
|
||
Без вращающихся уплотнений |
|
|||||||||||||
|
|
трубкой |
|
|
||||||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С частотой создания меток, |
|
|
С постоянной частотой |
|
|
|
|||||||
|
пропорциональной скорости потока |
|
|
создания меток |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Манометрические |
|
Датчик обтекания |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Датчики расхода
Вертушечный
Индукционный
Ионизационный
Массовый
Сметками
потока
Скоростного
напора

РАСЧЕТ ТАХОМЕТРИЧЕСКОГО ДАТЧИКА РАСХОДА
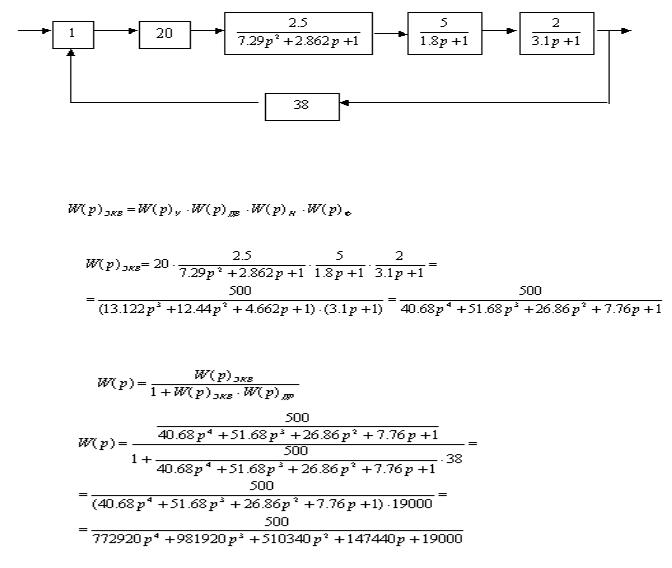
ДЕЛЕНИЕ ЛСУ НА ИЗМЕНЯЕМУЮ И НЕИЗМЕНЯЕМУЮ ЧАСТИ
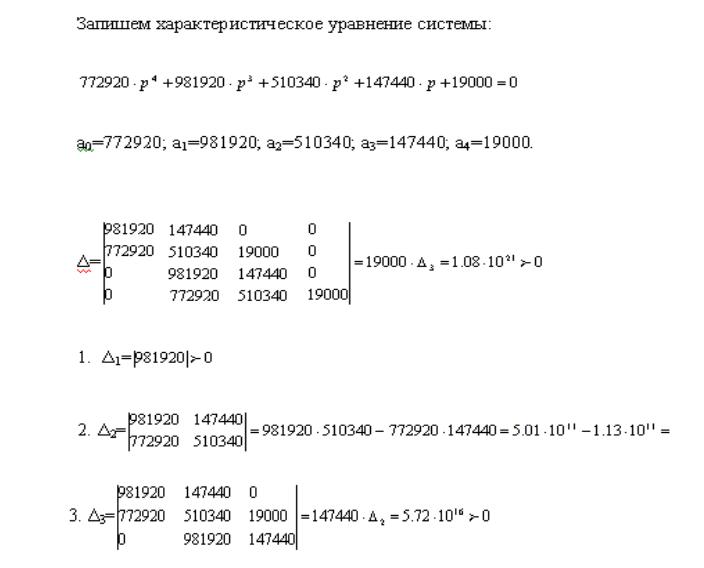
ПРОВЕРКА УСТОЙЧИВОСТИ ЛИНЕЙНОЙ ЧАСТИ СИСТЕМЫ ПО КРИТЕРИЮ ГУРВИЦА
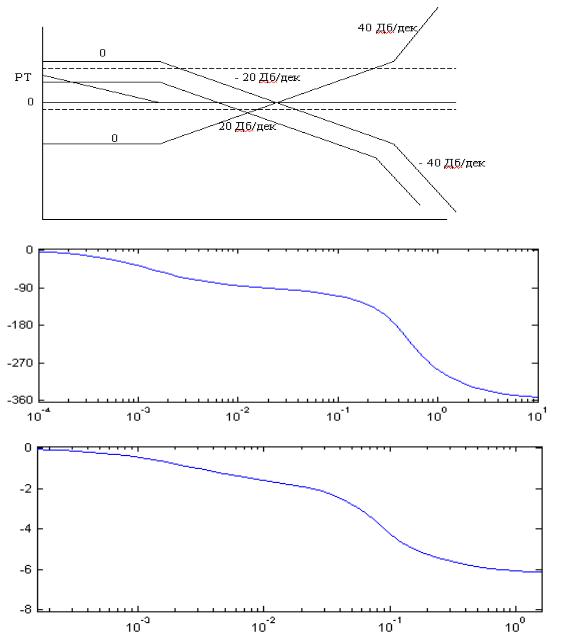
ЛОГАРИФМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПОЛИВАЛЬНОЙ МАШИНЫ
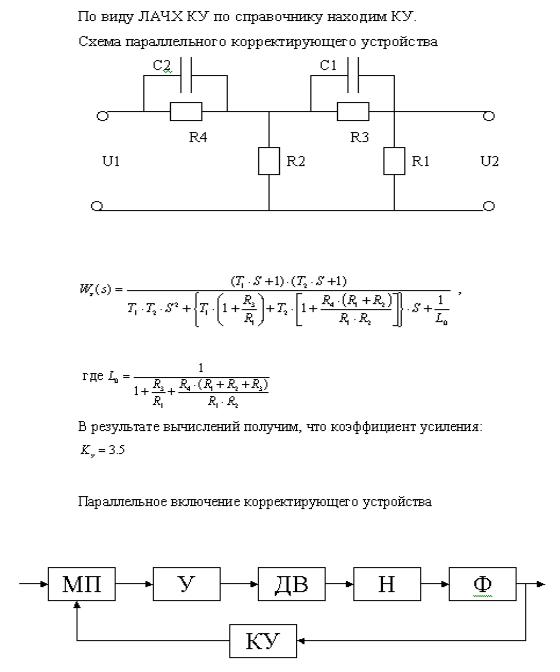
СИНТЕЗ ПАРАЛЛЕЛЬНОГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
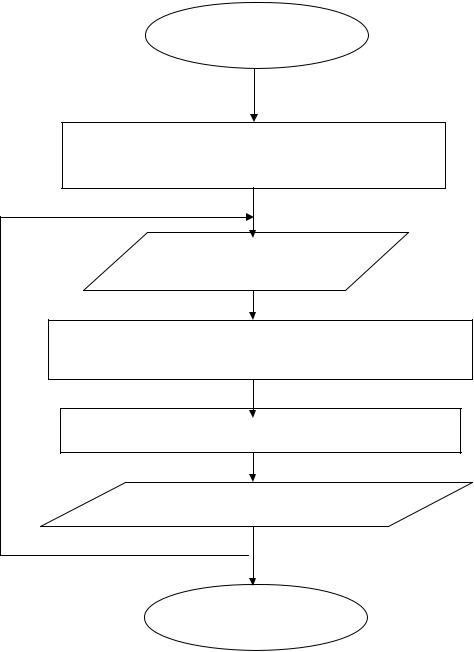
БЛОК – СХЕМА ПРОГРАММЫ КОРРЕКЦИИ
Начало
yk-1=0; yk-2=0 xk-1=0; xk-2=0; xk-3=0
Чтение входного сигнала и помещение его в xk-1
yk=-0.84yk-1+0.17 yk-2+0.2xk-1-0.32xk-2+19.11xk-3
yk-2=yk-1; yk-1=yk; xk-2=xk-1; xk-1=xk
Вывод управляющего сигнала ук
Конец