

2.5 Гидропривод
Гидропривод представляет собой две емкости, перемещение штока в одной из которых зависит от перемещения штока в другой. Внешнее давление является постоянным и не подлежит регулированию. Однако давление на выходе гидропривода требует регулирования. Такое регулирование происходит путем перемещения штока в первой камере. Схематическое исполнение ГП представлено на рис.2.

Рисунок 2
Выберем гидропривод исходя из требуемого давления на выходе (400 кПа). Под такие параметры подпадает привод марки MAXIMA 350 [3].
Технические характеристики:
давление питания, кПа 700
давление на выходе, при максимальном сдвиге штока, кПа 410
максимальный ход штока на входе, см 5
максимальный ход штока на выходе, см 10
управляющее давление, кПа 800
КПД, % 70
рабочий диапазон температур -10…+30
Передаточная функция гидропривода имеет вид:
![]() (11)
(11)
Кроме того:
![]()
где: PГП – давление на выходе гидропривода;
P – давление на входе гидропривода.
Требуемое на выходе
гидропривода давление составляет
410кПа*1.73=692кПа, давление питания составляет
700 кПа. Максимальный ход штока на входе
5 см, на выходе 10 см т.е. коэффициент
передачи гидропривода
![]() .
.
Механическая постоянная времени гидроцилиндра:
![]() (12)
(12)
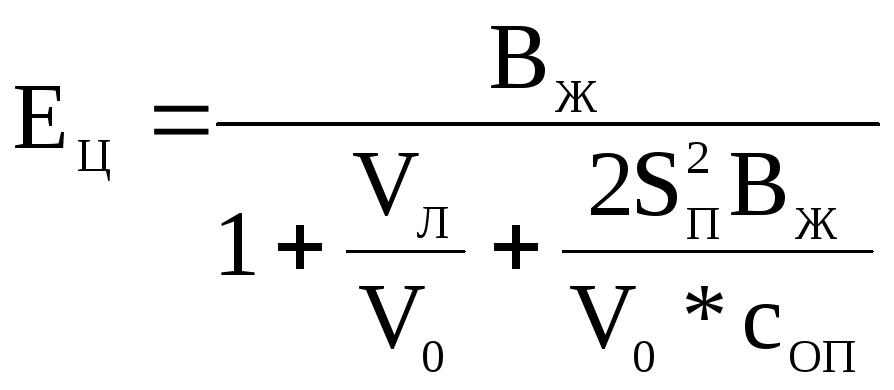
где приведенная жесткость нагруженного цилиндра:
 (13)
(13)
где
![]() – приведенный модуль упругости
гидроцилиндра
– приведенный модуль упругости
гидроцилиндра
 (14)
(14)
где: m0 - масса подвижных частей управляемого объекта, приведенная к штоку привода;
SП - рабочая площадь поршня;
V0 - объем одной полости гидроцилиндра при среднем положении поршня;
сСВ=6*106 Н/м - жесткость связи штока гидроцилиндра с управляемым объектом;
BЖ=1250 МПа - модуль объемной упругости рабочей жидкости;
VЛ=10*10-5 м3 - объем подводящего трубопровода гидролинии и мертвого объема гидроцилиндра;
V0 - объем полости гидроцилиндра при среднем положении поршня;
cОП=4.3*106 Н/м- жесткость опоры гидроцилиндра;
Рабочая площадь поршня определяется по формуле:
![]() (15)
(15)
где: DП=0.037 – диаметр поршня гидроцилиндра;
dШТ=0.012 – диаметр штока гидроцилиндра;
Т.о. SП=9.64*10-4 м2. Масса подвижных частей управляемого объекта m0=ρ*V, где ρ=2.7*103 кг/м3 (алюминий) и V=90 см3. Т.е. m0=0.243 кг.
Объем одной полости цилиндра:
V0=![]() (16)
(16)
где: YШТ.MAX.=3 см – максимальный ход штока
Т.о. V0=1.45*10-5 м3. Исходя из полученных данных, применим в (14)


Таким образом, механическая постоянная времени:
![]() с
с
Требуется определить постоянную времени демпфирования гидроцилиндра:
![]() (17)
(17)
где: KQ=6.44*10-10 - коэффициент линеаризованной расходно-перепадной характеристики.
kТР= 0.2 (бронза)- коэффициент трения в подвижных частях объекта
Таким образом:
![]()
Для получения передаточной функции требуется определить коэффициент демпфирования:
![]() (18)
(18)
Т.е.
![]() .
.
Т.о. передаточная функция гидроцилиндра запишется в виде:
![]()
2.6 Датчик линейного перемещения МВ-43-5В
Для преобразования перемещения в пропорциональный ему электрический сигнал используется датчик линейного перемещения ДТЛ -32 -4,5В [4].
Технические характеристики:
Величина максимального перемещения, мм 60
Сопротивление датчика, Ом 200
Максимальное напряжение, мВ 4,5
Удельное сопротивление материала провода, Ом*мм2/м 0.62
Минимальная температура нагрева корпуса, 0С -15
Максимальная температура нагрева корпуса, 0С 60
 В
качестве датчика линейного перемещения
будем использовать потенциометрический
датчик, который преобразует величину
перемещения в пропорциональное выходное
напряжение [5]. На рисунке 3 показан
потенциометрический датчик.
В
качестве датчика линейного перемещения
будем использовать потенциометрический
датчик, который преобразует величину
перемещения в пропорциональное выходное
напряжение [5]. На рисунке 3 показан
потенциометрический датчик.
Рисунок 3 – Пьезоэлектрический датчик ускорения
Конструктивно потенциометрический датчик состоит из каркаса 1, на который намотана в один слой обмотка 2 из тонкого провода. По виткам обмотки скользит движок (щетка) 3, который механически связан с объектом, перемещение которого надо измерит, Обмотка выполнена из изолированного провода, а дорожка по которой скользит движок, предварительно очищена от изоляции. При больших усилиях прижатия движка используется провод диаметром 0,1 -0,3 мм
. Чувствительность потенциометрического датчика высчитывается следующим образом:
![]() ,
(19)
,
(19)
где п — количество витков ;
![]() - удельное
сопротивление проводника при 20 0С;
- удельное
сопротивление проводника при 20 0С;
![]() - коэффициент нагрузки;
- коэффициент нагрузки;
![]() - коэффициент перемещения движка;
- коэффициент перемещения движка;
f – температурный коэффициент сопротивления 1/0С
Коэффициенты
![]() и
и
![]() - определяются следующим образом:
- определяются следующим образом:
![]() ,
(20)
,
(20)
![]() (21)
(21)
где RН –сопротивление нагрузки,
R –полное сопротивление нагрузки;
х – перемещение движка;
l – длинна намотки;
Выходной сигнал потенциометра:
U= SaF, (22)
где F— измеряемая сила, но
F=m*a, (23)
где m – инерционная масса тензодатчика, кг;
a – ускорение, измеряемое потенциометром, причем
а = N*g,, (24)
g = 9.8 м/с2 – ускорение свободного падения;
N – коэффициент пропорциональности.
Решая
совместно уравнения (19) - (24) подставляя
значения для коэффициентов [?] f=3.4
![]() =
0.49
=
0.49
![]() =0.4328
получим:
=0.4328
получим:
![]() (25)
(25)
Или
![]() (26)
(26)
Как было сказано выше толщина проволоки 0,1 мм то есть количество витков умноженное на 10 это длинна потенциометрического датчика то есть получили зависимость геометрических параметров потенциометрического датчика от инерционной массы, зададим m = 0.00001 кг, тогда h/l=4.12*10-3.
Передаточная функция потенциометрического датчика:
W(p)=![]() .
(27)
.
(27)
Из технических характеристик
Wlp=![]() (28)
(28)