

Введение
Автоматическое регулирование представляет собой наиболее эффективный принцип автоматики при частичной автоматизации, когда технические средства автоматики осуществляют лишь простые функции управления, связанные с измерением, анализом, контролем различных физических величин и отработкой решений, принятых оператором в виде установок, программ или других сигналов управления.
Современные системы управления сложными объектами промышленной технологии строятся по иерархическому принципу. Это значит, что система управления такими объектами расчленяется на ряд систем, стоящие на разных уровнях подчинения. Система более высокого ранга, ориентируясь на общий (глобальный) критерий управления, выдает команды на включение или отключение отдельных локальных объектов, а также осуществляет выбор частных критериев управления этими объектами. Локальные системы управления осуществляют поддержание заданных оптимальных режимов как в пусковых, так и в нормальных эксплуатационных условиях. Являясь нижним иерархическим уровнем автоматических систем управления промышленными объектами, локальные системы осуществляют функции измерения, контроля и регулирования основных технологических параметров, характеризующих состояние технологического процесса. Количество регулируемых параметров в отдельно взятой локальной системе управления невелико и составляет один или два параметра. Из общего числа систем управления современным производством локальные системы составляют около 80%. Качество работы локальных систем управления во многом определяет стабильность и качество выходного продукта, а, следовательно, и рентабельность производства.
1 РАСШИРЕННОЕ ТЕХНИЧЕСКОЕ ЗАДАНИЕ
Целью курсового проекта является проектирование автоматической системы капельного орошения теплиц. Автоматическая система капельного орошения теплиц предназначена для подачи питательного раствора в корневую зону каждого растения.
Данная система должна выполнять следующие функции:
-
производить полив растений в определенное время по заданному графику;
-
подавать раствор под заданным давлением в зависимости от необходимой интенсивности полива.
Технологическая схема автоматической системы капельного орошения теплиц представлена на рисунке 1.
 1 - контроллер; 2 – насос; 3 -
предохранительный
клапан; 4 -
трубопровод;
1 - контроллер; 2 – насос; 3 -
предохранительный
клапан; 4 -
трубопровод;
5 - форсунка; 6 – датчик давления
Рисунок 1 - Технологическая схема автоматической системы капельного
орошения теплиц
Технологические параметры автоматической системы капельного орошения теплиц представлены в таблице 1.
Таблица 1 - Технологические параметры автоматической системы капельного орошения теплиц
|
Параметр |
Значение параметра |
|
Рабочая температура |
0-50 0С |
|
Относительная влажность |
5-85 % |
|
Вибрация |
17 Гц |
|
Источники питания |
110 В,220 В |
|
Время наработки на отказ |
80000 часов |
|
Перерегулирование |
2 % |
|
Время регулирования |
20 с |
2 ВЫБОР И ОБОСНОВАНИЕ ВЫБОРА ЭЛЕМЕНТНОЙ БАЗЫ
ЛОКАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ
2.1 Выбор и расчёт передаточных функций элементов локальной системы
управления
Используем классическую систему управления с обратной связью. Для обеспечения работы такой системы необходимо измерять регулируемый параметр, сравнить его с заданным значением, определить величину ошибки и ее знак, рассчитать по выбранному алгоритму управления управляющее воздействие, подать управляющее воздействие через исполнительный механизм на объект управления.
2.1.1 Выбор и расчёт передаточной функции контроллера. В современных оросительных системах контроллер является основным органом управления. Наличие в системе орошения программируемого контроллера позволяет включать полив согласно графику в заданное время, что существенно упрощает управление всей системой.
Надежные малогабаритные модели контроллеров позволяют:
- регулировать расход воды, увеличивать или уменьшать ее поступление, нажатием только одной клавиши;
- выполнять высокоточное орошение цветочных клумб по специальным автономным программам по отдельному графику;
- контроллеры поставляется с 9V батареей для защиты памяти и сохранения установленного времени в случае сбоя питания.
Для работы в автоматической системе капельного орошения теплиц был выбран контроллер IRC-860 фирмы «ORBIT», так как этот контроллер обеспечивает управление программами, определяемое пользователем при выполнении многочисленных программ и возможность выбора и перехода от 1 до 4 программ. / 3 /

Рисунок 2 - Контроллер IRC-860
Технические характеристики контроллера IRC-860:
напряжение питания, В 110, 220;
производимая мощность, Вт 35;
выходное напряжение, В 6;
ударопрочный корпус
блокиратор с ключами
габаритные размеры, мм 260×149×219;
масса, кг 5,4.
Передаточная функция контроллера является стандартной и равна:
![]() (1)
(1)
2.1.2 Выбор и расчёт передаточной функции насоса. Для работы в автоматической системе капельного орошения теплиц был выбран насос НВ-3, так как он предназначен для подъёма воды из колодцев, ёмкостей и других источников и для работы в различных системах водоснабжения, орошения и повышения давления. Также насос НВ-3 имеет следующие преимущества перед другими видами насосов:
-
бесшумная работа;
-
высокая надежность;
-
длительный срок службы;
-
экономичность в работе;
-
не требует обслуживания. /4/

Рисунок 3 – Насос НВ-3
Технические характеристики насоса НВ-3:
подача раствора, м3/ч 300;
напор, МПа 0,1-0,4;
диаметр подсоединительных патрубков, мм 40;
входной диаметр, мм 170;
выходной диаметр, мм 180;
число лопаток 4;
относительная скорость потока, м/с 2;
габаритные размеры, мм 530×180×230;
масса, кг 30.
Передаточная функция насоса определяется по формуле:
![]() ,
(2)
,
(2)
где kн – коэффициент усиления насоса, который определяется как:
![]() ,
(3)
,
(3)
где Qном – номинальное значение расхода (м3/ч);
рном – номинальное значение напора жидкости (МПа);
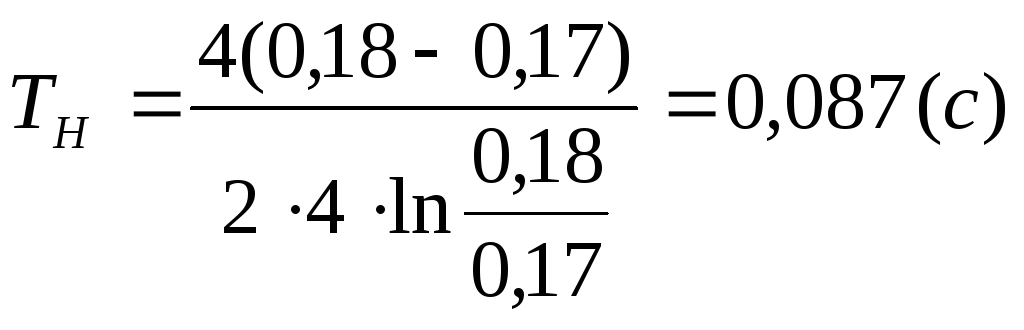
Тн – постоянная времени насоса, равная:
 (4)
(4)
где d1 – входной диаметр насоса (м);
d2 – выходной диаметр насоса (м);
zП – число лопаток;
σотн - относительная скорость потока (м/с).
Подставив значения необходимых параметров из технических характеристик насоса в формулы (3) и (4), получим:
![]() (5)
(5)
 (6)
(6)
Тогда выражение для передаточной функции насоса:
![]() (7)
(7)
2.1.3 Выбор и расчёт передаточной функции клапана. Для работы в автоматической системе капельного орошения теплиц был выбран предохранительный мембранный клапан ПМК 20Н/0,3, так как давление срабатывания у него равно 0,3МПа (данное значение давления является максимально допустимым для работы форсунки)./5/

Рисунок 3 – Клапан ПМК 20Н/0,3
Технические характеристики клапана ПМК 20Н/0,3:
рабочее давление, МПа 0-0,3;
габаритные размеры, мм 40×45;
масса, кг 0,5;
средний срок службы, лет 10.
Клапан является нелинейным элементом и имеет релейную характеристику, которая описывается выражением:

Определим передаточную функцию клапана, применив метод гармонической линеаризации. По справочнику Топчеева определяем, что для данного вида нелинейности коэффициент гармонической линеаризации равен:
![]() ,
(8)
,
(8)
где р – давление переключения клапана (МПа);
А – диаметр подсоединительных патрубков (м).
Тогда передаточная функция клапана будет иметь вид:
![]() (9)
(9)
2.1.4 Выбор и расчёт передаточной функции трубопровода. Для работы в автоматической системе капельного орошения теплиц выбираем трубопровод из металлопластика ТМП-25, предназначенный для использования в помещениях./6/
Технические характеристики клапана трубопровода ТМП-25:
диаметр, мм 25;
толщина стенки, мм 1;
длина трубопровода, м 7.
Передаточная функция трубопровода определяется по формуле:
![]() ,
(10)
,
(10)
где kтр – коэффициент, равный падению давления в трубопроводе, определяемый по формуле:
![]() ,
(11)
,
(11)
где рвых – давление на выходе трубопровода (МПа);
рвх – давление на входе трубопровода (МПа);
Ттр – время прохождения потока жидкости через трубопровод:
![]() ,
(12)
,
(12)
где l – длина трубопровода (м);
v – скорость жидкости (м/с).
Подставив в формулы (11) и (12) значения необходимых параметров из технических характеристик трубопровода, получим:
![]() (13)
(13)
![]() (14)
(14)
Тогда выражение для передаточной функции трубопровода примет вид:
![]() (15)
(15)
2.1.5 Выбор и расчёт передаточной функции форсунки. Для работы в автоматической системе капельного орошения теплиц выбираем форсунку типа сопло тангенциальное 25×12, так как она предназначена для разбрызгивания раствора на различную площадь в зависимости от давления потока./7/

Рисунок 4 – Форсунки типа сопло тангенциальное
Технические характеристики клапана форсунки типа сопло тангенциальное 25×12:
диаметр выходного сечения, мм 12;
присоединительный диаметр трубопровода, мм 25;
рабочий напор, МПа 0,22-0,3;
расходная характеристика Q=0.88*p0.5.
Форсунка является нелинейным элементом, поэтому выражение для передаточной функции форсунки определим с помощью метода гармонической линеаризации. Для этого построим расходную характеристику форсунки, которая определяется по выражению:
![]() ,
(20)
,
(20)
где Q – расход жидкости (м3/ч);
р – давление жидкости (МПа).
График расходной характеристики форсунки представлен на рисунке 5:
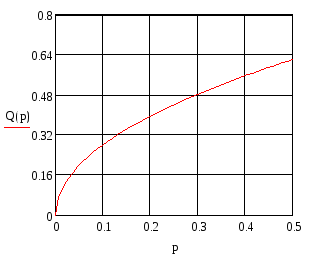
Рисунок 5 – Расходная характеристика форсунки
По справочнику Топчеева для данного вида нелинейности коэффициент гармонической линеаризации равен:
![]() ,
(21)
,
(21)
где В – рабочее давление форсунки (МПа);
ξ – постоянная, равная ξ=0,06;
А – расход форсунки (м3/ч).
Подставив в формулу (21) значения необходимых параметров из технических характеристик форсунки, получим:
![]() (22)
(22)
Таким образом, передаточная функция форсунки имеет вид:
![]() (23)
(23)
2.1.6 Выбор и расчёт передаточной функции датчика давления. Для работы в автоматической системе капельного орошения теплиц был выбран мембранный датчик давления АИР-10, предназначенный для преобразования давления в унифицированный выходной сигнал 6 В./8/
Технические характеристики датчика давления АИР-10:
диапазон измеряемых величин давления:
-
Рmin, кПа 4;
-
Pmax, МПа 0,4;
диаметр мембраны, мм 42;
толщина мембраны, мм 0,1;
число гофров мембраны 2;
глубина гофров мембраны, мм 0,0278;
выходное напряжение, В 6;
время срабатывания, с 0,2;
температура окружающей среды, 0С -40 - +125;
масса, кг 0,185.
Передаточная функция датчика давления определяется по формуле:
![]() ,
(16)
,
(16)
где kд – коэффициент преобразования датчика, определяемый по формуле:
![]() ,
(17)
,
(17)
где U – напряжение на выходе датчика (В);
р – напор на входе датчика (МПа);
Тд - время задержки преобразования сигнала (с).
С учётом технических характеристик датчика давления перепишем выражение (17):
![]() (18)
(18)
Тогда формула (16) примет вид:
![]() (19)
(19)
2.3 Структурная схема автоматической системы капельного
орошения теплиц
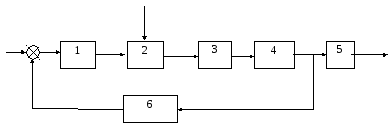
Структурная схема автоматической системы капельного орошения теплиц представлена на рисунке 6.

Рисунок 6 – Структурная схема автоматической системы капельного
орошения теплиц
Определим выражение для общей передаточной функции автоматической системы капельного орошения теплиц:
 (24)
(24)
Преобразовав выражение (24), получим:
![]() (25)
(25)
3 РАСЧЁТ ДАТЧИКА ОБРАТНОЙ СВЯЗИ ЛОКАЛЬНОЙ
СИСТЕМЫ УПРАВЛЕНИЯ
Принцип действия мембранных датчиков давления основан на измерении деформации гофрированной мембраны, односторонне нагружаемой контролируемым давлением. Максимальный прогиб мембраны 1 мм.
Мембраны обладают значительной жесткостью и потому менее восприимчивы к вибрациям. Защита от агрессивных жидкостей и газов обеспечивается нанесением на мембраны защитных покрытий или пленок. Защита мембран от перегрузок по давлению осуществляется сравнительно просто. Диапазоны измерения мембранных датчиков давления находятся в пределах 0,004 – 0,4 МПа. По точности измерения обычно выпускаемые промышленностью мембранные датчики давления соответствуют классу 1,6 (погрешность не превышает 1,6% диапазона измерения).
В датчике давления АИР-10 используется равномерно гофрированная мембрана, прогиб которой равномерно возрастает с увеличением давления. Датчик давления АИР-10 относится к мембранным измерительным преобразователям давления, в которых в качестве промежуточного преобразователя применены тензорезисторы, приклеенные непосредственно к мембране. Наряду с особо малыми размерами датчик обладает стабильной характеристикой в течение длительного времени и малым гистерезисом. /9/
Между деформацией мембраны f и действующим на мембрану давлением р существует зависимость, описываемая выражением:
![]() ,
(26)
,
(26)
где d – диаметр мембраны (d =42 мм);
E – модуль упругости мембраны ( E = 2.1*1012);
h – толщина мембраны( h = 0.1мм);
C – коэффициент, зависящий от числа гофров и их глубины( С=2,6).
Преобразуем выражение (26) и подставим в него необходимые параметры:
 (27)
(27)
 (28)
(28)
Преобразовав выражение (28), получим:
![]() (29)
(29)
Таким образом, статическая характеристика датчика давления АИР-10 будет иметь вид:
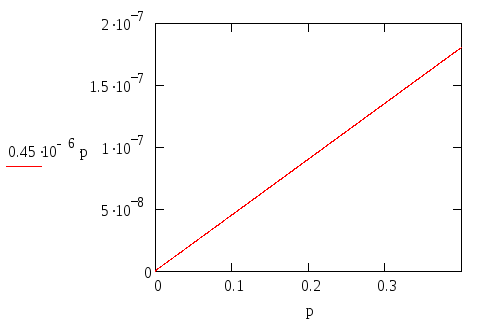
Рисунок 7 – Статическая характеристика датчика давления АИР-10
4 РАСЧЁТ УСТОЙЧИВОСТИ
4.1 Определение устойчивости автоматической системы капельного
орошения теплиц по критерию устойчивости Гурвица
Этот критерий формирует условие устойчивости в виде определителя. Для характеристического уравнения L(p) составляют определитель, содержащий n строк и n столбцов:
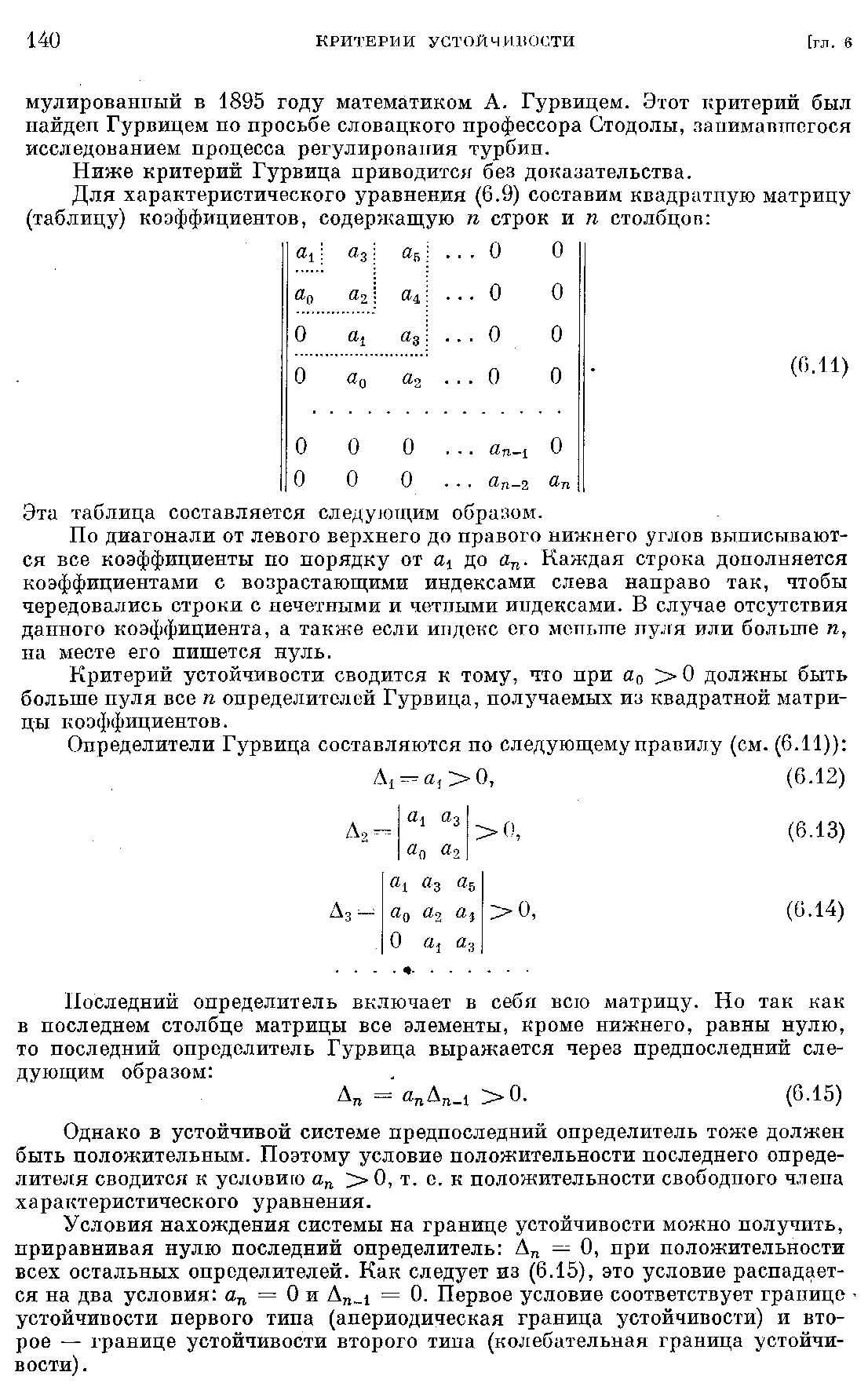
По диагонали от левого верхнего до правого нижнего углов вписываются все коэффициенты по порядку от а1 до an. Каждая строка дополняется коэффициентами с возрастающими индексами слева направо так, чтобы чередовались строки с нечетными и четными индексами. В случае отсутствия данного коэффициента, а также если индекс его меньше нуля или больше n, на месте его пишется ноль. Из главного определителя выделяются диагональные миноры:
![]() (31)
(31)

Критерий устойчивости Гурвица заключается в следующем: чтобы характеристическое уравнение имело все корни с отрицательной вещественной частью, главный определитель и все диагональные миноры должны иметь значения,
большие нуля.
Запишем выражение для характеристического уравнения:
![]()
Все коэффициенты характеристического уравнения положительны, значит, необходимое условие устойчивости выполняется.
Определим значения миноров:

Вывод об устойчивости: все миноры определителя Гурвица положительны, значит, вещественная часть корней характеристического уравнения отрицательна, и автоматическая системы капельного орошения теплиц устойчива.