

БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ ТЕХНОЛОГИИ И УПРАВЛЕНИЯ ФАКУЛЬТЕТ: ВЕЧЕРНЕ-ЗАОЧНЫЙ
КАФЕДРА:
УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
САР
дозирования сыпучих материалов
Курсовой проект студента группы УИТ - 51в Колесникова А.В.

Классификация приборов для измерения и дозирования массы
Приборы для измерения и дозирования массы
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Весы и |
|
Весы общего |
|
|
Весовые дозаторы |
|
Установки для |
||||||
дозаторы |
|
назначения |
|
|
технологические |
|
взвешивания |
||||||
лабораторные |
|
|
|
|
|
|
|
|
|
|
грузов при их |
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Специализи- |
Для сыпучих |
|
движении |
||||
|
|
|
|
|
|
|
рованные |
|
материалов |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
и жидкостей |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
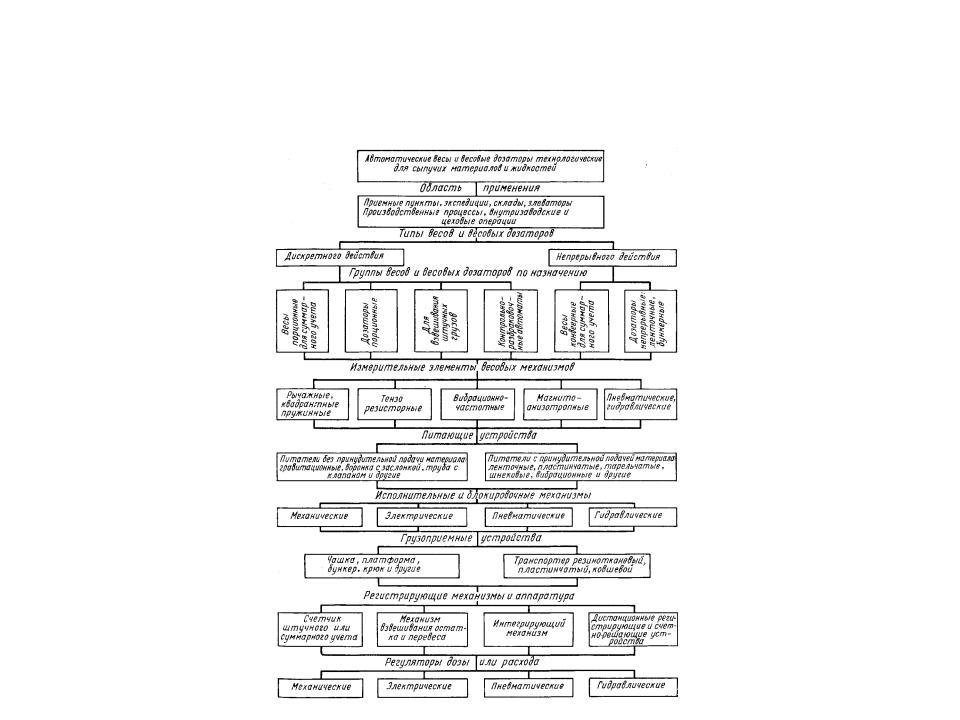
Классификация автоматических весов и весовых дозаторов

Процесс наполнения емкостей сыпучим материалом
9 |
9 |
Схема |
|
Схема |
управления |
весового |
двигателем |
дозирования |
лентоподачи |
4 |
6 |
3 |
7 |
1 |
5 |
Датчик |
2 |
|
8
1- подача пустого мешка на загрузку
2 - лентоподающий механизм
3 – пустой мешок
4 – загрузка
5 – перемещение наполнего мешка
6 – зашивка
7 – наполненный мешок
8 – двигатель лентоподающего механизма
9 – линии связи и управления
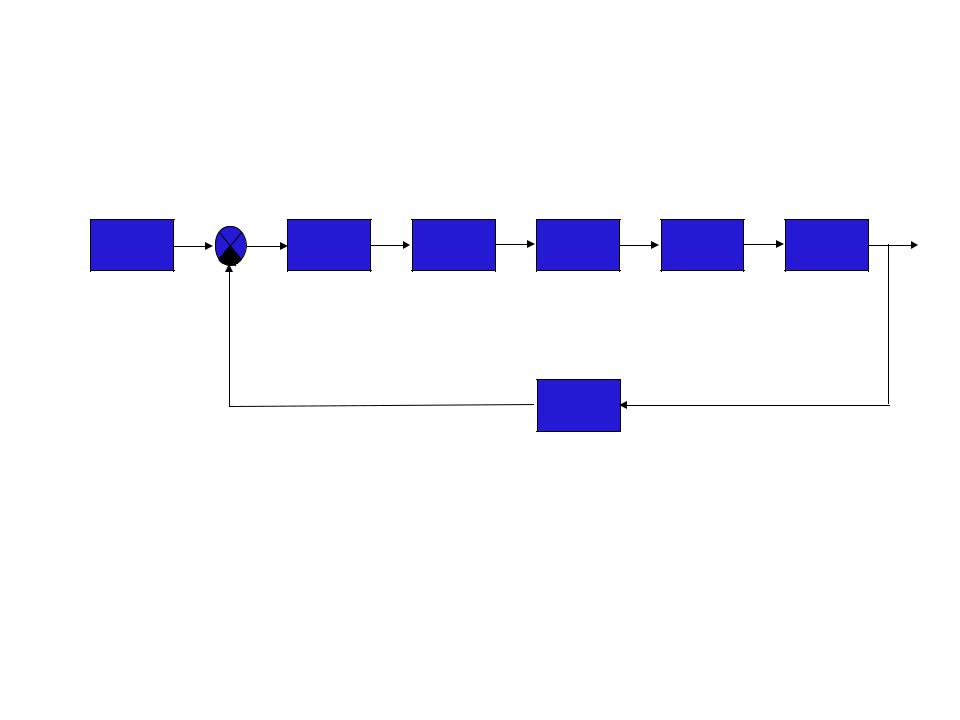
Структурная схема САР
ЗУ |
I0 |
I1 |
УC |
U2 |
ЭД |
ω1 |
Ред. |
ω2 |
РО |
Q |
ОУ |
M |
|
|
|
|
|
|
|
U Дат. M
ЗУ - задающее устройство УС - усилитель ЭД - электродвигатель Ред. - редуктор
РО - регулирующий орган ОУ - объект управления Дат. - датчик

Шнековый питатель
Q 60 D2 s n(кг / час) 4
м; D - диаметр шнека в
s - шаг шнека в м;
- объемная масса в кг/м3;
n - число оборотов в минуту;
- коэффициент заполнения материала
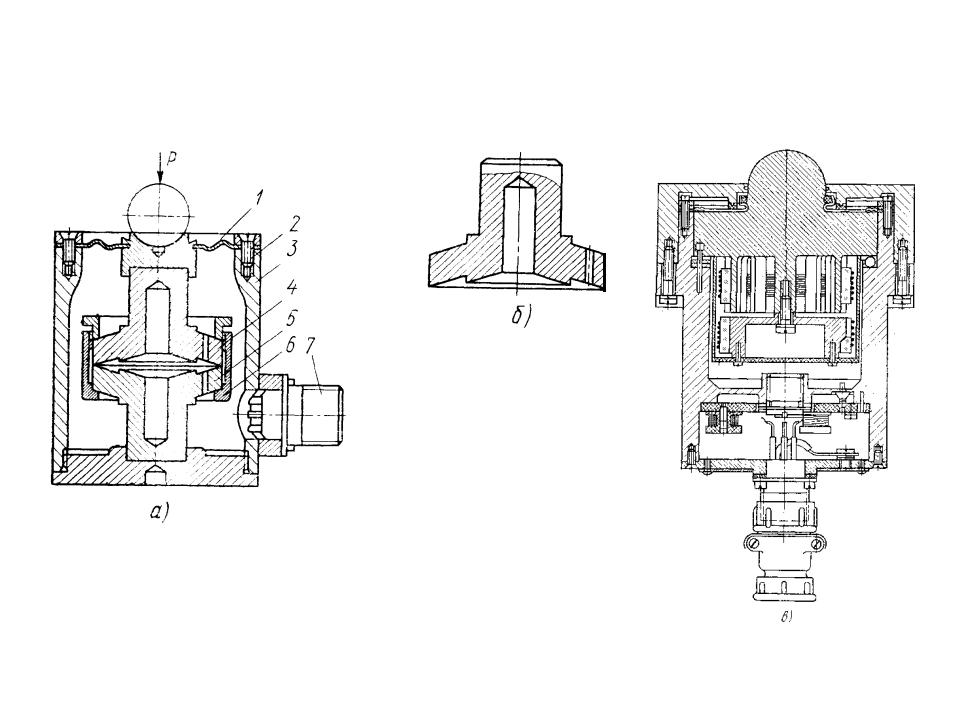
Датчик обратной связи
а – общий вид; б – упругий элемент датчика;
в – датчик типа ДСТБ-С-016
1 – мембрана;
2 – кольцо;
3 – корпус; 4, 5 – упругие элементы; 6 – обойма;
7 – четырехгранный разъем.

Передаточные функции разомкнутой и замкнутой нескорректированной системы
Wp ( p) |
12.6 |
|
|
||
p (0.25 p 1) (0.05 p 1) (0.017 p 1) |
||
|
Wз ( p) |
63 0.017 |
р 1 |
|
p (0.25 p 1)(0.05 p |
1)(0.017 p 1) 12.6 |
||
|

Устойчивость системы (метод Гурвица)
0.0002125 p3 0.0176 p2 0.317 p 1 0
|
a0 0.0002125 |
|
|
a1 0.0176 |
a2 0.317 |
а3 1 |
||||||||||||||
|
|
|
a1 |
|
a3 |
0 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
a0 |
|
a2 |
|
0 |
|
a1 a2 a3 a1 a1 0 a3 0 0 a3 a3 a0 0 a0 a1 0 a2 0 |
|||||||||||||
|
|
|
0 |
|
a1 |
|
a3 |
|
|
|
0.0053667 0 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1 |
|
a1 |
|
0.0176 0 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
2 |
|
|
|
a1 |
|
a3 |
|
a a |
2 |
a |
a |
3 |
0.005579 0 |
|
|
||||
|
|
|
|
|||||||||||||||||
|
|
|
|
a0 |
|
a2 |
|
1 |
0 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
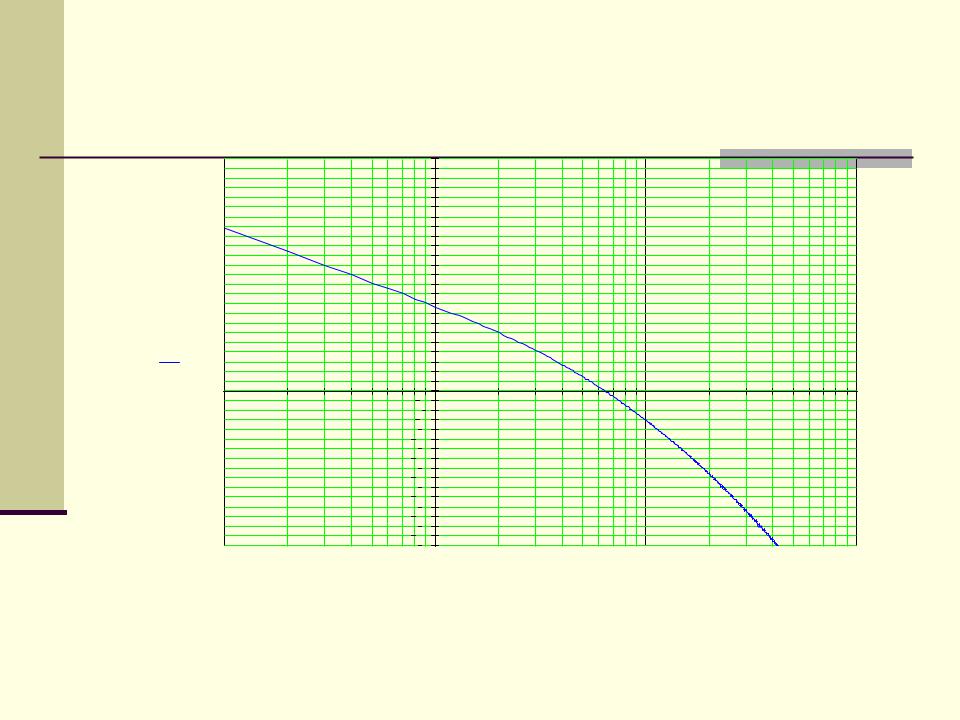
ЛАЧХ |
|
|
|
|
системы(неапроксимированая) |
|
|||
|
60 |
|
|
|
|
57.5 |
|
|
|
|
55 |
|
|
|
|
52.5 |
|
|
|
|
50 |
|
|
|
|
47.5 |
|
|
|
|
45 |
|
|
|
|
42.5 |
|
|
|
|
40 |
|
|
|
|
37.5 |
|
|
|
|
35 |
|
|
|
|
32.5 |
|
|
|
|
30 |
|
|
|
|
27.5 |
|
|
|
|
25 |
|
|
|
|
22.5 |
|
|
|
|
20 |
|
|
|
|
17.5 |
|
|
|
|
15 |
|
|
|
|
12.5 |
|
|
|
20log(A( )) |
10 |
|
|
|
|
7.5 |
|
|
|
|
5 |
|
|
|
|
2.5 |
|
|
|
0.1 |
2.5 |
1 |
10 |
100 |
|
5 |
|
|
|
|
7.5 |
|
|
|
|
10 |
|
|
|
|
12.5 |
|
|
|
|
15 |
|
|
|
|
17.5 |
|
|
|
|
20 |
|
|
|
|
22.5 |
|
|
|
|
25 |
|
|
|
|
27.5 |
|
|
|
|
30 |
|
|
|
|
32.5 |
|
|
|
|
35 |
|
|
|
|
37.5 |
|
|
|
|
40 |
|
|
|
|
|
|
|
|