

6.1 Исходные данные для разработки системы управления
Передаточная функция разомкнутой системы:


Задаются максимальные значения скорости и ускорения задающего воздействия g(t):



Тогда получим координаты рабочей точки в логарифмическом масштабе:
 (36)
(36)
 (37)
(37)
По номограмме Солодовникова (Рисунок 7) и заданным в первом этапе перерегулированию, колебательности и времени регулирования определяем частоту:

(38)
Далее определяем частоту среза:
 (39)
(39)
Для того чтобы
система была устойчива и отвечала
заданным критериям качества, необходимо,
чтобы через точку на оси абсцисс с
координатой
 ЖЛАЧХ проходила с наклоном минус 20
дБ/дек до пересечения с асимптотами:
ЖЛАЧХ проходила с наклоном минус 20
дБ/дек до пересечения с асимптотами:
 (40)
(40)
 (41)
(41)
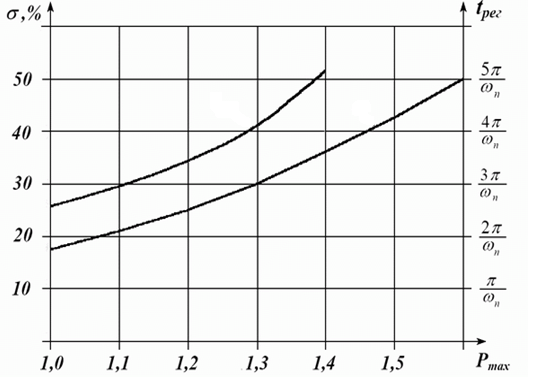
Рисунок 7 - Номограмма Солодовникова
Из построений можно определить передаточную функцию ЖЛАЧХ (рисунок 8):
где
 – коэффициент усиления ЖЛАЧХ.
– коэффициент усиления ЖЛАЧХ.
 (43)
(43)
6.2 Построение лачх корректирующего устройства
Применим последовательное корректирующее устройство (КУ).
Подключение аналогового корректирующего устройства возможно последовательно с усилителем, также в данной работе рассматривается современная программная коррекция.
ЛАЧХ КУ строится зеркальным отображением относительно желаемой ЛАЧХ.
ЛАЧХ КУ изображена на рисунке 8.
Из построений можно определить передаточную функцию ЛАЧХ КУ:

где
 – коэффициент усиления ЛАЧХ КУ.
– коэффициент усиления ЛАЧХ КУ.
Найдем
 :
:
20lg =-150,
=-150,
 =0,00000001.
=0,00000001.
Перепишем выражение
с учетом найденного значения
 :
:
 (45)
(45)

Рисунок 8 – ЛАЧХ, ЖЛАЧХ системы, ЛАЧХ корректирующего
устройства
7 Расчет корректирующего устройства
Одним из методов коррекции стало применение программных корректирующих устройств на микропроцессорах (в данном случае используется программируемый блок управления шаговыми двигателями), применение которых позволяет варьировать параметры в широких пределах и быстро их изменять без внесения изменений в техническое исполнение системы.
Дискретная коррекция заключается в составлении программы коррекции на том языке, на котором работает микропроцессор («машинный» язык микропроцессора – Ассемблер, остальные языки программирования более понятны и удобны для человека, но не для процессора).
Для того чтобы составить программу коррекции необходимо получить характеристическое уравнение в реальном масштабе времени.
Произведем замены и выполним z – преобразование, согласно принятым допущениям:

(46)


(47)

(48)
Проведем z – преобразование, умножим и числитель, и знаменатель на z-1 и получим передаточную функцию корректирующего устройства, которая примет вид:


(49)
Характеристическое уравнение:
(50)

Для составления программы, выражение представим в виде:
(51)

Микропроцессор выявляет отклонение полученного сигнала от желаемого, то есть необходимого в данный момент, и выдает команду на устранение этого отклонения.
Значения желаемого сигнала задаются в микропроцессоре в цифровом виде. Вычисления производятся в машинном коде.
;X – входной сигнал
;Y – выходной сигнал
i_port EQU 11h; номер порта для чтения
o_ port EQU 12h; номер порта для записи
A1 EQU -0,00000029; постоянные
A2 EQU 0,00000029; коэффициенты
B1 EQU 1; разностного
B2 EQU 1; уравнения
X0, X1 DB 0; выделение памяти под
;переменные X(k), X(k-1)
Y0, Y1 DB 0; выделение памяти под
;переменные Y(k), Y(k-1)
;т. о. вычисляем значение
;выражения
Y(K) = A1*X1+ A2*X2 +B1*Y1+ B2*Y2
start: ;метка начала цикла коррекции
in al, i_port; читаем из порта данные
mov X1, a1;
mul a1, A1; вычисление слагаемого A1*X1
mov b1, a1; сохранение результата в b1
; в результате имеем A1*X1 в регистре b1
mov a1, X2; вычисление
mul a1, A2; слагаемого A2*X2
add b1, al; и вычитание из предыдущего результата
; в результате имеем A1*X1+A2*X2 в регистре b1
mov a1, Y1; вычисление
mul a1, B1; слагаемого B1*Y1
add b1,a1; и вычитание из предыдущего результата
mov a1, Y2; вычисление
mul a1, B2; слагаемого B2*Y2
add b1, a1; и вычитание из предыдущего результата
; в регистре b1 имеем результат вычисления всего выражения
mov Y2,Y1; сохранение значений для
mov Y1, b1; следующего такта
mov X2,X1; сохранение значений для
mov X1, a1; следующего такта
out o_port, b1; вывод управляющего сигнала из b1
jmp start; зацикливание на начало программы
Блок схема алгоритма коррекции приведена на рисунке 9:
начало

Чтение
входного сигнала и помещение его в



Вывод
управляющего сигнала

конец
Рисунок 9 – Блок-схема корректирующего устройства
Вывод: были рассмотрены программные и аппаратные корректирующие устройства. Отличительной особенность аппаратных КУ является их высокое быстродействие. Однако при современных вычислительных мощностях персональных и промышленных компьютеров этот факт не является решающим. Наиболее важным на сегодняшний день является такой фактор как преемственность, или возможность безболезненного переноса КУ с одной системы на аналогичную. Перенос аппаратного КУ является затруднительным, т.к. все параметры такого КУ являются жесткими и даже при небольших отличиях систем становится непригодным. Программное КУ с этой точки зрения является предпочтительным. Переносимость с одной платформы на другую, легкость эксплуатации и поддержания работоспособности. Возможно легко изменять параметры программы коррекции, что позволяет использовать одну программу для нескольких аналогичных систем.
ЗАКЛЮЧЕНИЕ
В процессе проектирования локальной системы автоматического регулирования тепловым режимом электронных компонент была проведена следующая работа: подбор элементов, нахождение их передаточных функций и всей непрерывной системы в целом, расчет датчика обратной связи. Построение АЧХ и ФЧХ для определения прямых и косвенных характеристик САУ. Далее было произведено исследование САР на устойчивость. При исследовании были построены ЛАЧХ и ЛФЧХ, произведен расчет по критериям устойчивости Гурвица.
Так как дискретная система не удовлетворяла техническому заданию, была произведена ее корректировка. В качестве корректирующего устройства могут быть использованы как электродвигатель, RC – цепочка, так и управляющая программа на языке ASSEMBLER.. Поскольку в САР имеется микропроцессор, то для наиболее полного использования его возможностей, предпочтительней корректирующее устройство реализовать в качестве рабочей программы.
Таким образом, в результате проектирования была получена дискретная система автоматического регулирования тепловым режимом электронных компонент, удовлетворяющая требованиям, поставленным в техническом задании.
Список ИСПОЛЬЗУЕМОЙ литературы
1. Алексеев В.А., Арефьев В.А. Тепловые трубы для охлаждения и термостатирования радиоэлектронной аппаратуры. - М.: Энергия, 1979.
2. Барабаш М.Б,, Новицкая Т.Н., Янковский В.Н. Влияние внешних воздействий на характеристики тепловых труб. - Вопросы радиоэлектроники, сер.ТРТО, 1979, вып.З
3 Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования., M.: Наука – 1972 г. -768 с.
4 Дикарева А.А., Мирская М.И. Справочник по радиоэлектронным приборам., М.: Энергия – 1989 г.-143с.
5 Иващенко Н.Н. Автоматическое регулирование., М.: Наука – 1973 г.-324 с.
6 Сорокин П.В. Вычислительные комплексы. М.: Высшая школа – 1992 г.-323с.
7 Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования., М.: Машиностроение -1989 г.-752с.: ил.
8 Хвощ С.Т. Микропроцессоры и микроЭВМ в САУ: Справочник/ С.Т. Хвощ, Н.Н. Варлинский, Е.А. Попов; Под ред. С.Т. Хвоща. – Л: Машиностроение, 1987.