

2.3 Выбор тиристора
В качестве электронного компонента был выбран тиристор, серии Т171, с техническими характеристиками:
- тип тиристора: триодный;
- максимально допустимый ток в открытом состоянии 500А;
- температура перехода от -60 до 100ºС
- масса прибора 300 г;
- конструктивное исполнение: штыревое с гибкими выводами.
Передаточная функция тиристора представляется как:
 ,
(14)
,
(14)
где
 ,
(15)
,
(15)
 (16)
(16)
 ,
(17)
,
(17)
Передаточная функция тиристора:

 (18)
(18)
2.4 Выбор датчика температуры
В качестве датчика температуры выберем термометр сопротивления платиновый СО-3М-01. Термосопротивление представляет собой апериодическое звено первого порядка.
Технические характеристики датчика температуры:
- номинальное сопротивление при 0 °С, 46Ом;
- диапазон температур, от+200 до -500°С;
- время обработки сигнала, 0,7с.
Передаточная функция датчика температуры:
 (19)
(19)
где

 (20)
(20)
где ∆R – изменение сопротивления при изменении температуры,
определим из графика на рисунке 2;
∆t – диапазон измерения температуры.

Рисунок 2 – Статическая характеристика датчика температуры

Передаточная функция датчика температуры с учетом всех подстановок:

2.5 Выбор нормирующего устройства
В качестве нормирующего устройства был выбран нормирующий преобразователь фирмы Корунд, который преобразует входные сигналы от датчиков в унифицированные сигналы стандартных диапазонов (0…10В).
Передаточная функция нормирующего устройства:
k=3,3
2.6 Выбор микропроцессора
Выбран микропроцессорный комплекс, построенный на базе 16 разрядного микропроцессора КР1816ВЕ48. В состав комплекса входят ЦАП и АЦП.
Характеристики комплекса:
-
напряжение питания: 10В;
-
быстродействие 2,5 млн оп/с;
Характеристики ЦАП и АЦП даны в таблице 1.
Таблица 1 – Характеристики ЦАП и АЦП.
|
|
Тип микросхемы |
Разрядность |
tуст, мкс |
л % |
Uоп, В |
Uпит, В |
|
АЦП |
К572ПА2А |
12 |
15 |
0,1 |
±15 |
+5;+15 |
|
ЦАП |
К572ПВ1В |
12 |
170 |
0,2 |
±15 |
+5;+15 |
W(p)=1 (21)
3 РАСЧЕТ ДАТЧИКА ОБРАТНОЙ СВЯЗИ САУ
В качестве датчика температуры был выбран терморезистор СО-3М-01. Терморезисторы относятся к параметрическим датчикам температуры, поскольку их активное сопротивление зависит от температуры. Терморезисторы называют также термометрами сопротивления или термосопротивлениями. Они применяются для измерения температуры в широком диапазоне: от минус 270 до 1600°С.
Различают металлические и полупроводниковые терморезисторы. Металлические терморезисторы изготавливают из чистых металлов: меди, платины, никеля, железа, реже из молибдена и вольфрама. Для большинства чистых металлов температурный коэффициент электрического сопротивления составляет примерно (4 ÷ 6,5)·10ˉ³ 1/°С, то есть при увеличении температуры на 1 °С, сопротивление металлического терморезистора увеличивается на 0,4 ÷ 0,65 %. Наибольшее распространение получили медные и платиновые терморезисторы.
Основные технические характеристики датчика температуры:
- напряжение питания, В 220;
- измеряемый диапазон температур, °С от -200 до +500;
- время обработки сигнала, мс 700;
- номинальное сопротивление при 0 °С, Ом 46.
Расчет датчика сводится к определению его чувствительности и значения сопротивления в зависимости от температуры.
Сопротивление металлического проводника R зависит от температуры:
 ,
(22)
,
(22)
где C – постоянный коэффициент, зависящий от материала проводника,
α – температурный коэффициент сопротивления,
Т – температура.
Абсолютная температура К в Кельвинах связана с температурой Т в градусах Цельсия:
К=273 + Т. (23)
Определим
относительное изменение сопротивления
проводника при его нагреве. Пусть
сначала проводник находился при начальной
температуре
 и имел сопротивление
и имел сопротивление
 .
При нагреве до температуры Т его
сопротивление RТ.
Запишем отношение
.
При нагреве до температуры Т его
сопротивление RТ.
Запишем отношение
 и
и
 :
:
 .
(24)
.
(24)
Известно,
что функцию вида
 можно разложить в степенной ряд:
можно разложить в степенной ряд:
 .
(25)
.
(25)
В нашем
случае x=α(T- ).
Так как величина α для платины сравнительно
мала и в диапазоне температур от минус
20 до плюс 150 °С может быть принята
постоянной α=4,3·10ˉ³ 1/°С, то и произведение
α·(Т-
).
Так как величина α для платины сравнительно
мала и в диапазоне температур от минус
20 до плюс 150 °С может быть принята
постоянной α=4,3·10ˉ³ 1/°С, то и произведение
α·(Т- )
в этом диапазоне температур меньше
единицы, поэтому при разложении (25)
членами второй степени и выше можно
пренебречь:
)
в этом диапазоне температур меньше
единицы, поэтому при разложении (25)
членами второй степени и выше можно
пренебречь:
 .
(26)
.
(26)
Выразим
сопротивление при температуре Т через
начальное сопротивление при
 :
:
 .
(27)
.
(27)
Платиновые терморезисторы выпускаются серийно и обозначаются ТСП (термосопротивления платиновые) с соответствующей градуировкой: гр. 21 имеет сопротивление 46 Ом при 0 °С.
Для
металлического терморезистора
чувствительность можно получить
дифференцируя (27), следовательно
 .
Именно температурный коэффициент
сопротивления определяет чувствительность:
.
Именно температурный коэффициент
сопротивления определяет чувствительность:
 =α=4,3·10ˉ³
1/°С . (28)
=α=4,3·10ˉ³
1/°С . (28)
Рассчитаем значения сопротивлений в зависимости от температуры по формуле (28) и занесем их в таблицу 2.
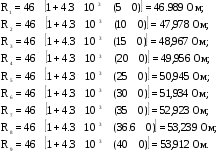
Таблица 2 – Зависимость сопротивления терморезистора от температуры
|
Температура, °С |
Сопротивление, Ом |
|
5 |
46,989 |
|
10 |
47,978 |
|
15 |
48,967 |
|
20 |
49,956 |
|
25 |
50,945 |
|
30 |
51,934 |
|
35 |
52,923 |
|
36,6 |
53,239 |
|
40 |
53,912 |
Так как измеряемый диапазон изменения температуры датчика в данной системе от 0 до 40 °С, то можно определить максимальное и минимальное сопротивления:
 =53,912
Ом;
=53,912
Ом;
 =46
Ом.
=46
Ом.
4 ПРОВЕРКА НА УСТОЙЧИВОСТЬ, ПЕРЕХОДНЫЙ ПРОЦЕСС САУ ТЕПЛОВЫМ РЕЖИМОМ ЭЛЕКТРОННЫХ КОМПОНЕНТ
После расчета передаточной функции каждого элемента найдем общую передаточную функцию всей системы.
Передаточная функция замкнутой системы имеет вид:
 (29)
(29)
Подставляем посчитанные в разделе 2 значения коэффициентов усиления и постоянных времени и получаем:
 (30)
(30)
Для устойчивости системы необходимо и достаточно, чтобы все миноры определителя Гурвица были положительными. По коэффициентам характеристического уравнения составляется определитель Гурвица.
Для этого по главной диагонали определителя выписываются все коэффициенты характеристического уравнения, начиная со второго, затем вверх записываются коэффициенты с возрастающим индексом, а вниз с убывающим индексом.
Составленный определитель называется главным определителем Гурвица, он имеет порядок, совпадающий с порядком характеристического уравнения. Из главного определителя составляются частные определители первого, второго, третьего и так далее порядков их образования из главного определителя.
Вычисляя главный определитель и частные определители, Гурвиц установил, для того, чтобы система была устойчива необходимо и достаточно, чтобы все определители были положительны. Если хотя бы один определитель отрицательный, то система неустойчива.
 ;
;

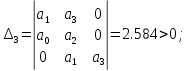
Т.к. первые три минора больше нуля и значения идут на увеличения то можно сделать вывод что систем является устойчивой.
Построим переходный процесс САУ. Для этого проведем обратное преобразование Лапласа от передаточной функции САУ.
График переходного процесса приведен на рисунке 3.
По графику переходного процесса определим показатели качества системы:
1) Время регулирования (время переходного процесса) – это величина, характеризующая быстродействие системы и определяется величиной
Время регулирования tр = 40.5 мин
2) Перерегулирование (максимальная динамическая ошибка) – это величина, которая определяет максимальное отклонение регулируемой величины от установившегося значения, выраженная в процентах:
 (31)
(31)
3) Время нарастания регулируемой величины – это время от момента приложения сигнала до того момента, когда выходная величина достигнет своего максимального значения.
Время достижения максимума (время нарастания) tн = 3.5 мин
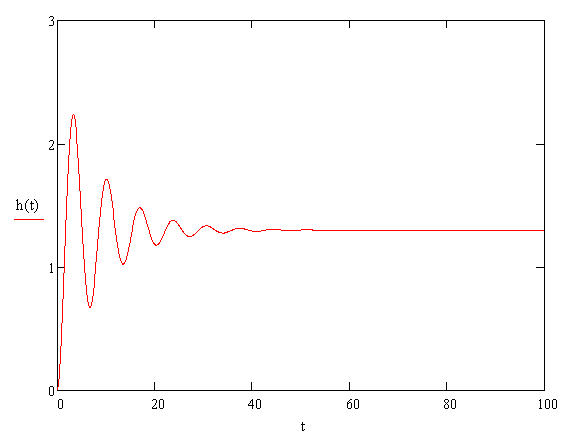
Рисунок 3 – Переходный процесс.
Построим график АЧХ для определения колебательности системы:
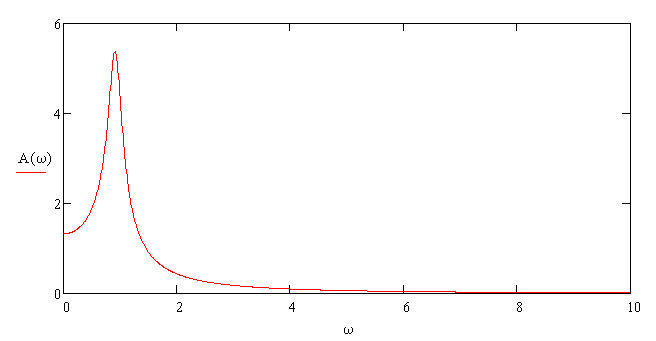
Рисунок 4 – Весовая функция.
По графику определяем:
-
амплитуду сигнала по нулевой частоте A(0)=1,33;
-
максимальную амплитуду сигнала A(max)=5,313;
-
полоса пропускания
 ;
; -
частота среза
 ;
; -
показатель колебательности
 ;
; -
значение
 при амплитуде 3,75:
при амплитуде 3,75:
 .
.
Расcчитаем устойчивость дискретной системы.
Для перехода к дискретной системе необходимо выполнить z-преобразование.
Z-преобразование выполним с передаточной функцией замкнутой системы. Для этого воспользуемся встроенной функцией программной среды Matlab. Текст рабочей программы имеет вид:
>> Wz=tf([1.6 2.3],[1 2.3 1.4 1.7])
>> Wzed=c2d(Wz,1)
>> step(Wz,Wzed)
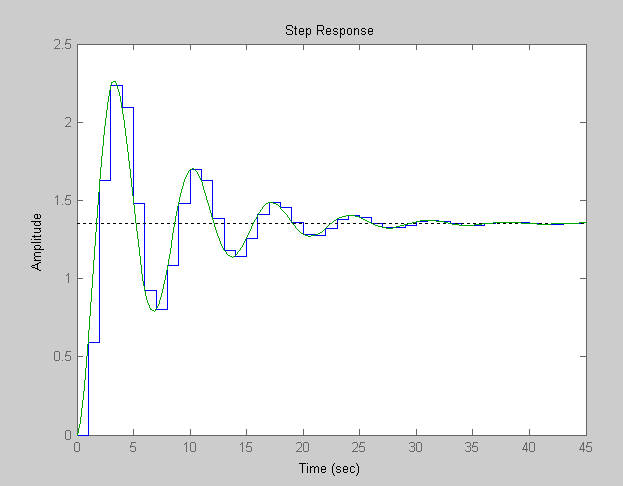
Рисунок 5 – График переходного процесса дискретной системы.
5 ПОСТРОЕНИЕ ЛОГАРИФМИЧЕСКИХ ХАРАКТЕРИСТИК
СИСТЕМЫ И ЕЁ АНАЛИЗ
5.1 Нахождение передаточной функции разомкнутой системы
Разрывается обратная связь:

5.2 Построение ЛАЧХ и ЛФЧХ
Для построения ЛАЧХ и ЛФЧХ воспользуемся программой MatLAB
Для передаточной функции неизменяемой части системы найдем Z–преобразование:


Перейдем от Z формы к псевдочастоте по следующему преобразованию:
 , (33)
, (33)
где λ – псевдочистота, рад/с.
Т0=0,005 с – такт между непрерывной и дискетной частями, учитывающий работу ЦАП, АЦП и корректирующей программы.


Используя формулу (34) строим ЛАЧХ в Matlab.
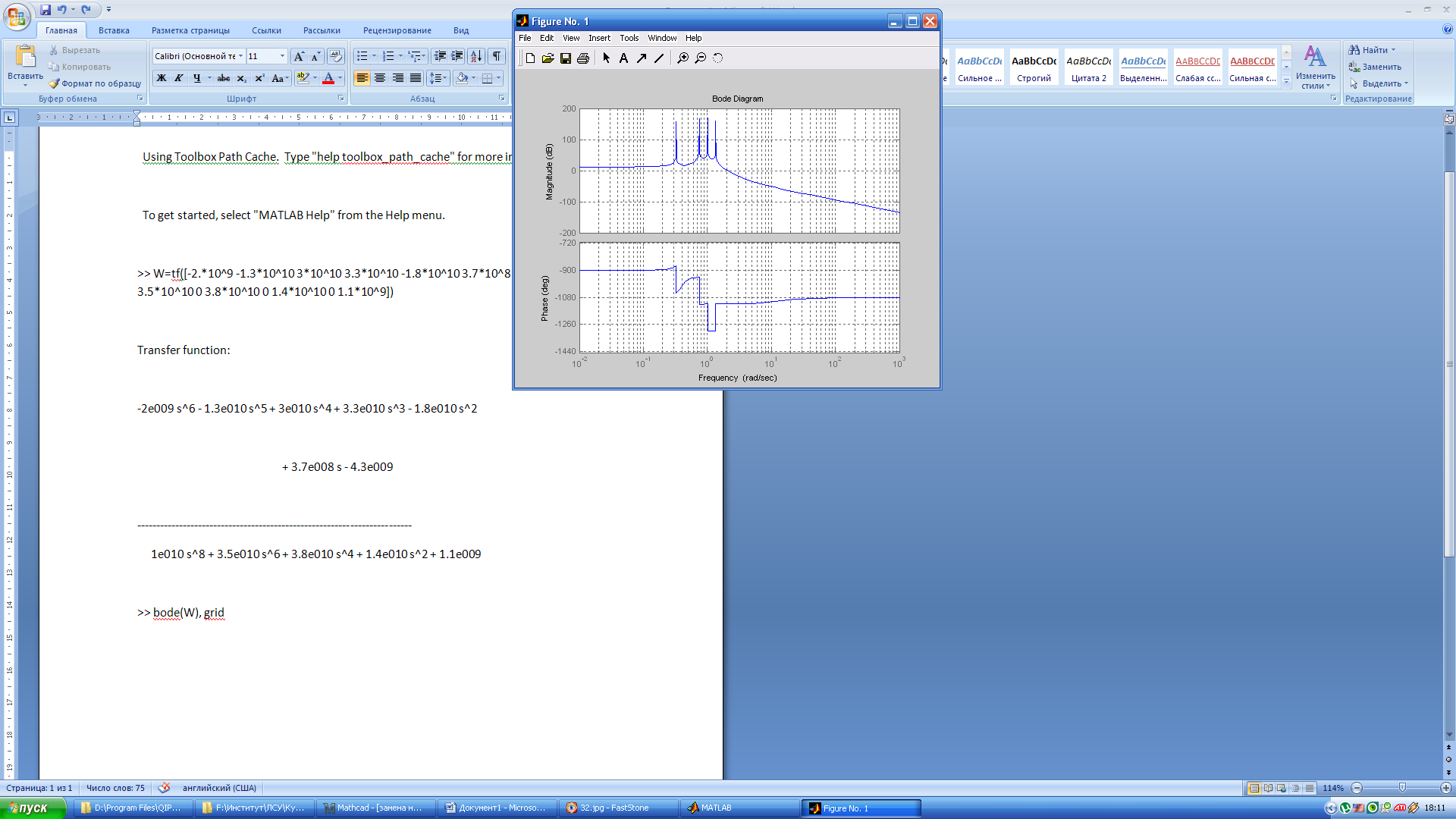
Рисунок 6 – ЛАЧХ
6 ПОСТРОЕНИЕ ЖЛАЧХ СИСТЕМЫ, ЛАЧХ КОРРЕКТИРУЮЩЕГО
УСТРОЙСТВА