


Введение
Задачей курсового проекта является разработка автоматической системы управления. В данном курсовом проекте будет разрабатываться САУ гидроприводом трансмиссии танка. Под разработкой понимается выбор элементной базы и расчет основных характеристик системы.
Системы автоматического управления создаются для того, чтобы автоматически, без непосредственного участия человека следить за управлением системы.
Управляемый процесс может определяться рядом параметров и их соотношениями. В простых случаях управляемый процесс может достаточно полно определяться одним параметром. Системы для управления такими процессами носят название локальных систем автоматики – это системы автоматики, предназначенные для решения одной функциональной задачи, для управления одним устройством. Введение автоматического управления:
Существенно повышает эффективность ведения технологических процессов;
Создает условия для применения экстремальных параметров (напряжение, ток, скорость, давление, температура, частота и многих других);
Освобождает частично или полностью обслуживающий персонал от непосредственного участия в осуществлении управления сложными процессами;
Сокращает частично или полностью количество обслуживающего персонала на том или ином объекте;
Повышает производительность автоматизированных устройств и объектов и повышает их экономичность;
Повышает качество выпускаемой продукции, обеспечив высокие точности исполнения всех требований, предъявляемых к ходу и результатам технологических процессов;
Позволяет получить возможность вести требуемый процесс в условиях и местах, недоступных для человека.
1 Техническое задание
Система автоматического управления гидроприводом трансмиссии танка состоит из следующих элементов:
Микропроцессор, выполняющий функции задатчика, сравнивающего устройства, корректирующего устройства;
Усилитель;
Реле;
Электромеханический привод;
Силовой агрегат;
Датчик движения.
Правая часть


1
2




Левая
часть
1 – карданная передача
2 – коробка передач со встроенным главным фрикционом
3 – механизм поворота
4 - бортовая передача
5 – дисковый тормоз
Рисунок 1 – Схема трансмиссии (Силовой агрегат)
Микропроцессор
согласно программе управления вырабатывает
управляющее воздействие в зависимости
от сигнала датчика обратной связи.
Усилитель преобразует напряжение с
выхода микропроцессора Uмп
до значения, требуемого для работы реле.
Если напряжение соответствует напряжению
срабатывания, то реле срабатывает, и
система находится в рабочем состоянии.
Сигнал (напряжение) подается на соленоиды,
которые
воздейс
Электромагнит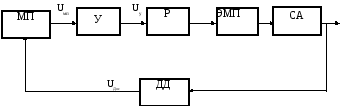
Uр l
![]()
МП – микропроцессор;
У – усилитель
Р – реле;
ЭМП – электромеханический привод
СА – силовой агрегат;
ДД – датчик движения.
Рисунок 2 - Функциональная схема системы автоматического управления гидроприводом трансмиссии танка
Технические характеристики системы:
Время регулирования, мин. около 1
Перерегулирование, % 30
Напряжение питания в системе, В 12
Температура окружающей среды, 0С –50 - +50
2 ВЫБОР ЭЛЕМЕНТНОЙ БАЗЫ И РАСЧЕТ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ КАЖДОГО ИЗ ЭЛЕМЕНТОВ СИСТЕМЫ
2.1 Выбор микропроцессора
При выборе микропроцессора следует руководствоваться следующими характеристиками:
Подходящая разрядность для разрабатываемой ЛСУ.
Допустимое время обработки информации.
Высокая производительность МП.
Возможность цифровой обработки аналоговых сигналов в реальном масштабе времени.
Возможность программной коррекции.
Малое энергопотребление.
Совместимость с другими микросхемами.
Доступность элементов.
Достаточно мощная и гибкая система команд МП.
На основании вышеперечисленных критериев выбирается микропроцессор Z80 фирмы ZILOG. МП обладает низкой стоимостью, высокой надежностью, малой потребляемой мощностью от источника питания, большим набором команд. Микропроцессор обладает следующими характеристиками:
Тактовая частота, МГц 3.5
Быстродействие, тыс.об/сек 900
Напряжение питания, В 5
Номинальный потребляемый ток, А 0.05
Рассеиваемая тепловая мощность, Вт 1.25
Разрядность шины данных, бит 8
Выходной ток лог. «0», мА 20
«1» ,мА 10
Передаточная
функция микропроцессора ![]() .
.
2.2 Выбор усилителя
Исходя из требований, выбирается полупроводниковый усилитель, обладающий следующими свойствами:
Большой диапазон коэффициента усиления.
Простота конструкции.
Низкий уровень помех.
Передаточная функция полупроводникового усилителя имеет вид [ ]:
![]() (1)
(1)
Коэффициент kу определяется как отношение мощности выходного сигнала устройства к мощности входного:
![]() , (2)
, (2)
где Uвых = 12В – напряжение необходимое для питания электрогидравлического усилителя;
Uвх = 5В – напряжение на выходе МП;
Таким образом, получим:
![]() .
.
Выбор реле
Наиболее соответствующим данной системе является промежуточное реле постоянного тока ЭП-1. Это реле удовлетворяет техническим характеристикам системы.
Технические характеристики промежуточного реле постоянного тока ЭП-1:
-потребляемая мощность, Вт 0,5
-собственное время срабатывания не более, сек 0,04
-длительно допустимый ток, А 5
-напряжение питания, В 12-24
- напряжение срабатывания Uср, В 12
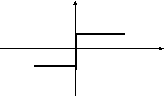
Статическая характеристика реле представлена на рисунке 3.
 F(x)
F(x)
+b
x
-b
Рисунок 3 - Статическая характеристика реле

F(x) = +b, х>0 ;
-b, x<0.
где b = Uср – напряжение срабатывания.
Передаточная функция промежуточного реле постоянного тока имеет вид:
![]() ; (3)
; (3)
где Кр –коэффициент передачи реле,
![]() (4)
(4)
где А – амплитуда первой гармоники сигнала,
В – значение напряжения срабатывания.
![]()
Передаточная функция реле примет вид:
Wр(р) = 1,2.
2.4 Выбор электромагнита
Остановим свой выбор на электромагните ВЭМ-1, предназначенном для управления вентилями и гидрораспределителями (золотниками). Электромагнит нормально работает при температуре окружающей среды от -50 до +50 0С.
Технические данные ВЭМ-1:
- поднимаемый груз, кг 0,4
-
ход не более,
с
- режим работы длительный

Рисунок 4 - Электромагнит ВЭМ - 1
Электромагнит ВЭМ-1 имеет передаточную функцию вида [ ]:
![]() , (5)
, (5)
где
![]() -передаточный
коэффициент соленоида,
-передаточный
коэффициент соленоида,![]() =1000
=1000
![]() -постоянная
времени соленоида,
-постоянная
времени соленоида,![]() =0,5
сек.
=0,5
сек.
![]() -коэффициент
демпфирования соленоида,
-коэффициент
демпфирования соленоида,
![]() =1
=1
Таким образом, получим:
![]() .
.
2.5 Выбор датчика движения
Для выбора датчика перемещения проведем их классификацию, приведенную на рисунке 5.
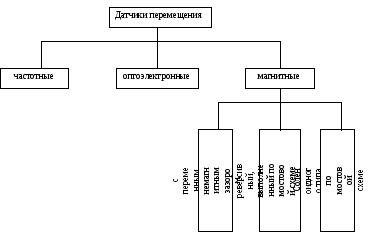
Рисунок 5 – Классификация датчиков перемещения
Частотные датчики перемещения пригодны для контроля быстрых процессов, используются для исследования вибрации, возможен контроль весьма малых перемещений (до 0,01 мм). Магнитные датчики перемещения основаны на изменении индуктивности обмотки составного магнитного сердечника, вызываемом изменением воздушного зазора между магнитопроводом и якорем; линейный участок характеристики ограничивается диапазоном изменения в пределах от 0,001 до 0,1 мм. У оптоэлектронных датчиков диапазон измеряемых перемещений до 1000 мм.
В качестве датчика обратной связи выберем абсолютный оптоэлектронный датчик линейных перемещений ДЛП-120Ц-005, который предназначен для непрерывного преобразования значений координаты в унифицированный электрический сигнал. Датчик ДЛП-120Ц-005 измеряет линейные перемещения и преобразует их в пропорциональный электрический сигнал.
Технические характеристики датчика ДЛП-120Ц-005:
диапазон изменения выходного сигнала, мА 0 – 5
диапазон измерения, мм 200
потребляемая мощность, Вт 10
дискретность отсчета, мкм 1
масса, г 300
Уравнение датчика линейных перемещений:
![]() (6)
(6)
Далее проведены необходимые преобразования.
![]()
![]()
![]() ;
;
![]()
![]()
Следовательно, датчик линейных перемещений ДЛП-120Ц-005 имеет передаточную функцию вида:
![]() ; (7)
; (7)
где kдд – коэффициент передачи датчика kдд=0,05;
Тдд – постоянная времени датчика, Тдд=0,06 с.
Получим передаточную функцию вида:
![]() .
.
3 РАСЧЕТ ДАТЧИКА ОБРАТНОЙ СВЯЗИ
Принцип действия оптоэлектронного датчика ДЛП-120Ц-005 основан на преобразовании измеряемого линейного перемещения в выходной электрический сигнал постоянного напряжения, пропорциональный измеряемой величине.
Преобразование электрического сигнала проходит в несколько этапов. На первом этапе происходит преобразование перемещения в угол поворота источника света. Преобразование описывается зависимостью вида:
![]() , (8)
, (8)
где kп - угловой коэффициент преобразования;
- угол поворота источника света, рад;
l – перемещение штока электромагнита, мм.
Угловой коэффициент преобразования рассчитывается следующим образом:
![]() , (9)
, (9)
где max – максимальный угол поворота источника света, max= 70 рад;
lmax – максимальное отклонение штока электромагнита, lmax = 0.2 мм ;
ᄉ ᄃ.
Тогда получим зависимость вида:
ᄉ ᄃ. (10)
Изменение угла поворота источника света приводит к изменению площади светового потока, падающего на рабочую поверхность фотодиода, что влечет за собой изменение напряжения на выходе датчика. Этот процесс описывается зависимостью вида:
ᄉ ᄃ, (11)
где ks – коэффициент преобразования, характеризующий зависимость напряжения от площади светового потока, ks=0,082.
Получим зависимость вида:
ᄉ ᄃ. (12)
Получим статическую
характерис
Как видно из рисунка 6, статическая характеристика оптоэлектронного датчика линейна.
ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ САУ
4.1 Расчет передаточной функции неизменяемой части системы и проверка на устойчивость
К неизменяемой части относят все элементы данной системы, которые нельзя изменить (поменять), так как это приведет к изменению работы системы. Следовательно, к ним можно отнести все элементы кроме микропроцессорного блока.
Передаточная функция разомкнутой системы:
ᄉ ᄃ (14)
![]()
Передаточная функция замкнутой системы:
![]() (15)
(15)
![]()
Оценим устойчивость системы. Оценку устойчивости проведем по критерию устойчивости Гурвица. Для этого рассмотрим характеристическое уравнение разомкнутой системы:
![]()
Обозначим:
Необходимое условие устойчивости выполнено - все коэффициенты характеристического уравнения положительные.
Составим определители Гурвица:
 (16)
(16)
![]() (17)
(17)
![]() (18)
(18)
Так как все определители Гурвица положительные, то выполняется и достаточное условие устойчивости системы. Таким образом, система устойчива.
Чтобы определить показатели качества, строится график переходного процесса. Для этого находится обратное преобразование Лапласа от передаточной функции замкнутой системы.

Рисунок 7 – Переходный процесс системы
По графику переходного процесса определим показатели качества системы:
1) Время регулирования (время переходного процесса) – это величина, характеризующая быстродействие системы и определяется величиной
hуст = 1,72
∆= 5%(hуст) = 0,086
Время регулирования tр = 0,96 с
2) Перерегулирование (максимальная динамическая ошибка) – это величина, которая определяет максимальное отклонение регулируемой величины от установившегося значения, выраженная в процентах:
![]()
3) Время нарастания регулируемой величины – это время от момента приложения сигнала до того момента, когда выходная величина достигнет своего максимального значения.
Время достижения максимума (время нарастания) tн = 0,73 с
Показатели качества управления удовлетворяют требованиям, заданным в техническом задании. Построим график АЧХ для определения колебательности системы:

Рисунок 8 - Амплитудно-частотная характеристика
Из построенной АЧХ определяется колебательность системы:
![]()
4.2 Расчет передаточной функции системы с учетом микропроцессора и проверка ее на устойчивость
ЭВМ работающая в системе имеет дискретный характер, поэтому вся система становится дискретной.
Так как разрабатываемая система является дискретной, поэтому, чтобы провести ее исследование с учетом дискретности, необходимо провести z- преобразование.
Проводится z-преобразование, учитывая дискретность системы Т0 = 0,01с.
Для проверки устойчивости системы после перехода от линейной к дискретной форме применяется критерий Шур-Кона. Данный критерий позволяет анализировать устойчивость дискретных и дискретно-непрерывных систем по характеристическому уравнению замкнутой системы, записанному в форме Z - преобразования.
Для
передаточной функции системы по таблице
z – преобразований получим z
– изображение передаточной функции, и
предварительно умножив его на фиксатор
нулевого порядка
![]() ,
получим следующее изображение передаточной
функции замкнутой дискретной системы
:
,
получим следующее изображение передаточной
функции замкнутой дискретной системы
:
![]() (19)
(19)
![]() -
отношение разрядностей ЦАП и АЦП
-
отношение разрядностей ЦАП и АЦП
Из справочника найдем выражение для передаточной функции нашей системы (T0 = 0,01 с):
 (20)
(20)
Проведя вычисления, получим:
![]() (21)
(21)
Характеристическое уравнение системы:
![]()
Обозначим:
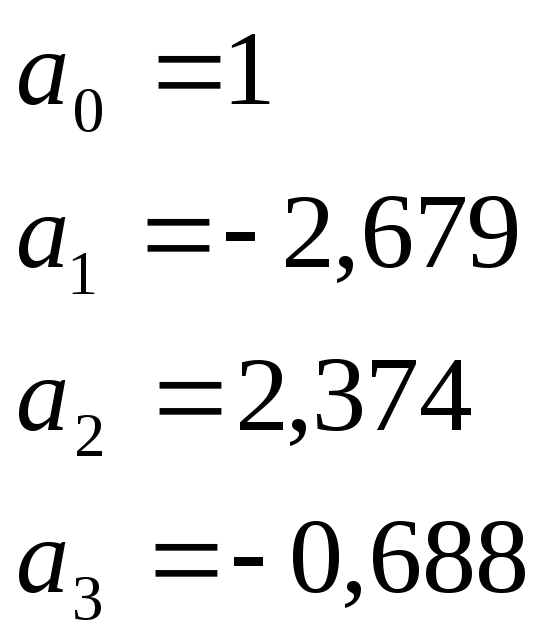
 (22)
(22)
 (23)
(23)
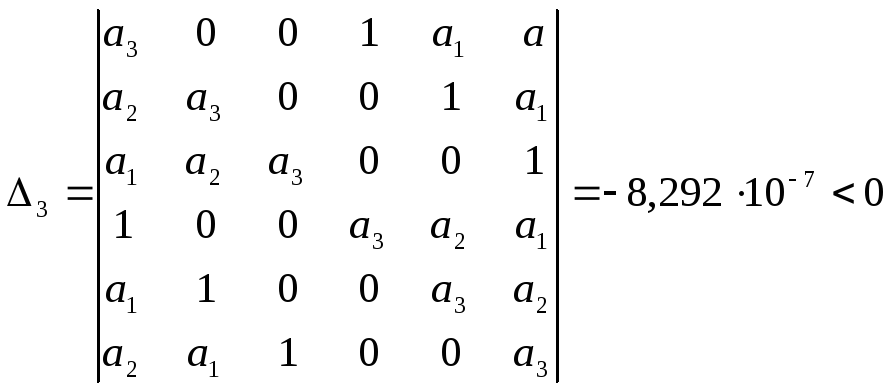
![]() (24)
(24)
Согласно данному критерию, если значение определителя с нечетным индексом меньше нуля, а с четным больше нуля, то система является устойчивой. Данное условие выполняется, следовательно, система в дискретной форме является устойчивой.