

1.0 1.1 1.2 1.3 1.4 Pmax
Рисунок 9 – Номограмма Солодовникова
По
заданной колебательности
 найдем среднечастотную область построения
ЖЛАЧХ. Верхней границе этой области
соответствует значение
найдем среднечастотную область построения
ЖЛАЧХ. Верхней границе этой области
соответствует значение
 дБ,
дБ,
нижней
–
 дБ.
дБ.
Наклон ЖЛАЧХ в среднечастотной области должен быть -20 дБ/дек, поэтому через частоту среза в этой области проводим прямую с наклоном -20 дБ/дек. В высокочастотной области ЖЛАЧХ сопрягается с исходной ЛАЧХ, то есть будет иметь такие же наклоны. Низкочастотная область не имеет большого значения, поэтому достраивается произвольно.
Полученная ЖЛАЧХ показана на рисунке 10.
10 102 103 104 105 106 107 108 109 1010
-20 дБ/дек
-80 дБ/дек
-40 дБ/дек
-20 дБ/дек
L()
, рад/с
Рисунок 10 – Построение ЖЛАЧХ
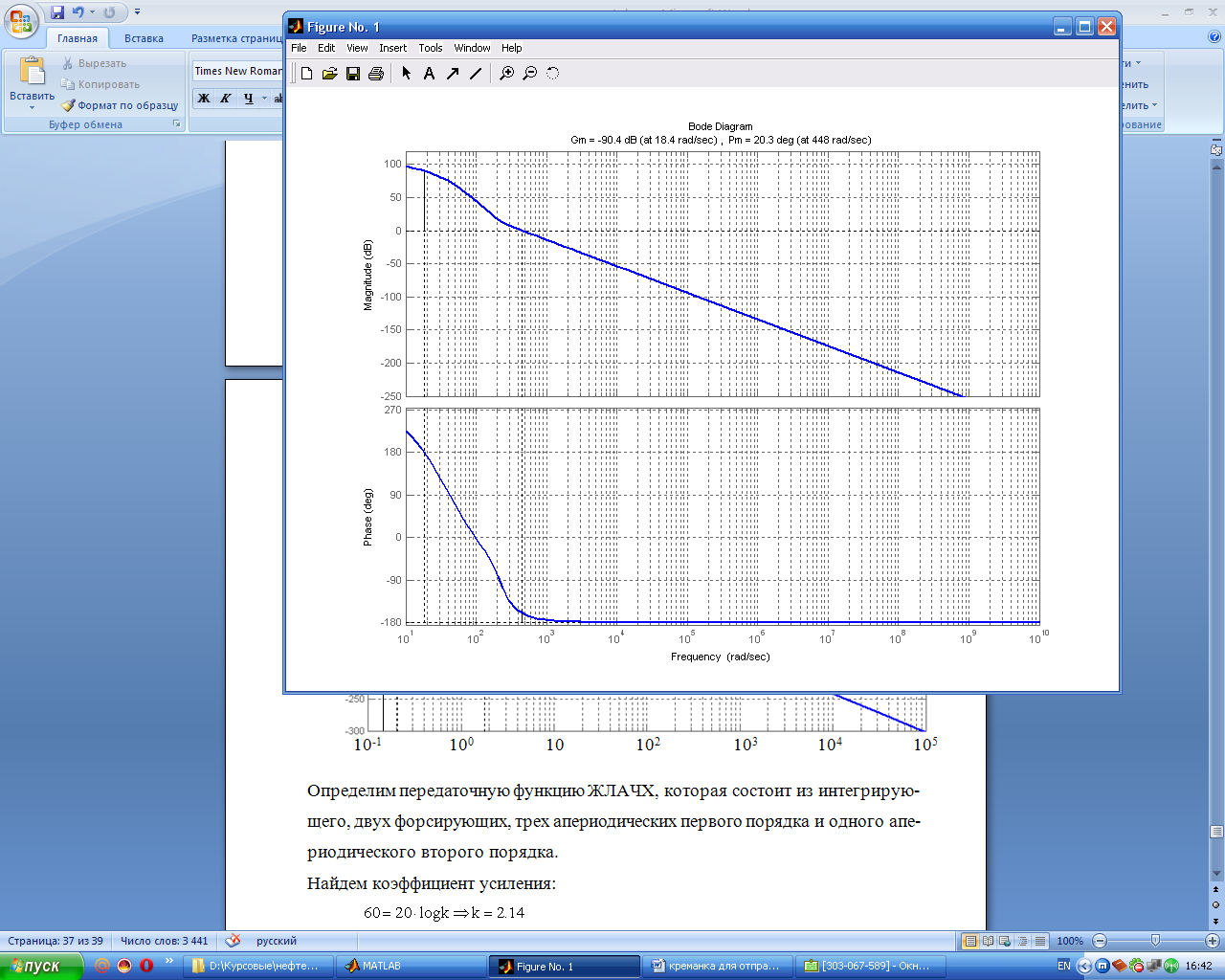
Определим передаточную функцию ЖЛАЧХ.
Найдем коэффициент усиления:
 .
.
Найдем постоянные времени:

Передаточная функция имеет следующий вид:
 ,
,

. (92)
Построим логарифмическую амплитудно-частотную характеристику (ЛАЧХ) и логарифмическую фазо - частотную характеристику (ЛФЧХ) системы управления нефтепереработкой в программе Matlabс помощью функции:
>> margin(W).
L()
φ()
, рад/с

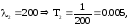
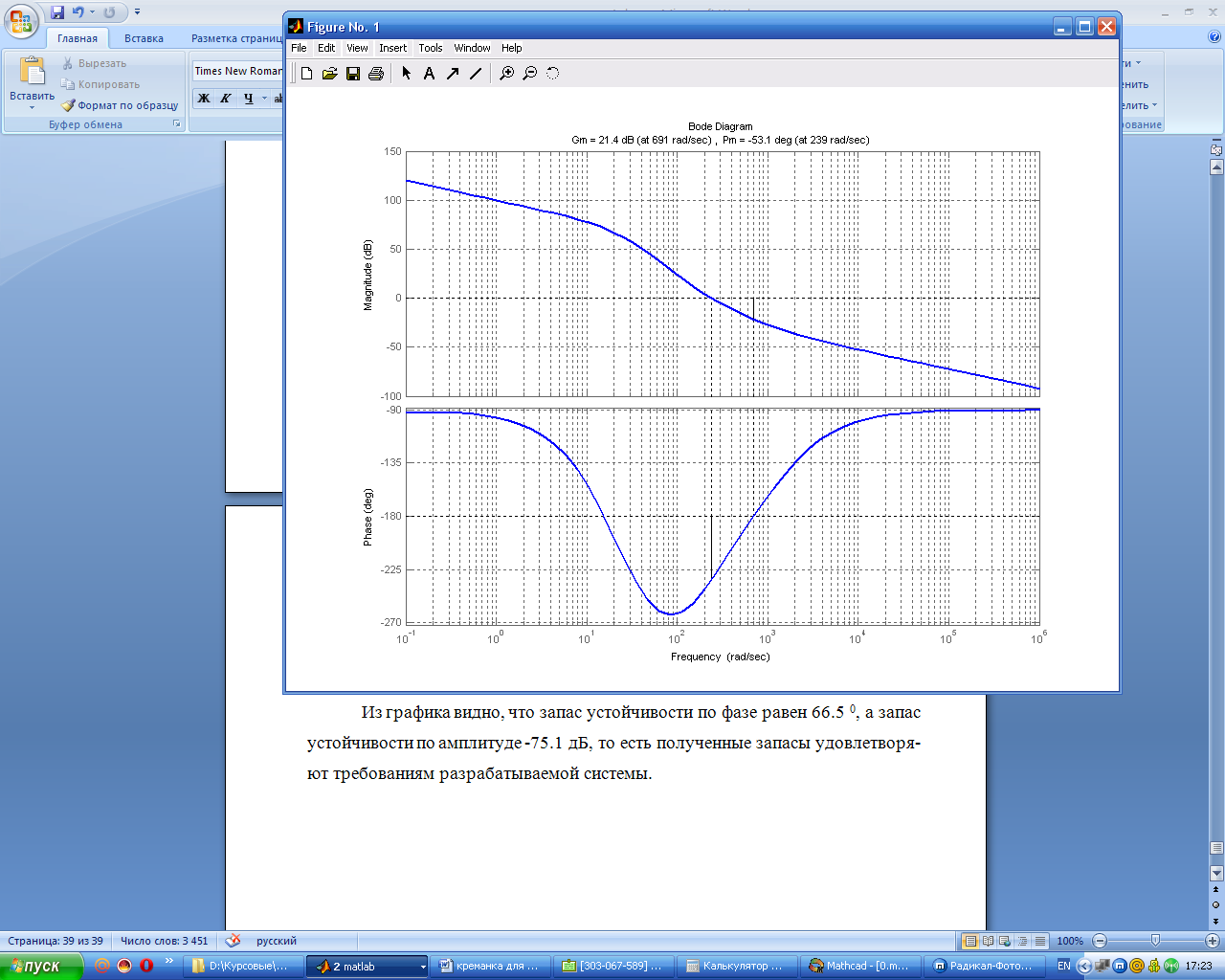
Рисунок 11 – Желаемая ЛАЧХ
Из графика видно, что запас устойчивости по фазе равен -53.1 0, а запас устойчивости по амплитуде 21.4 дБ, то есть полученные запасы удовлетворяют требованиям разрабатываемой системы.
Коррекция динамических свойств САР осуществляется для выполнения требований по точности, устойчивости и качеству переходных процессов.
Коррекция применяется также как средство обеспечения устойчивости неустойчивой системы или расширения области устойчивости, а также повышения качества переходного процесса.
Осуществляется коррекция с помощью введения в систему специальных корректирующих звеньев с особо подобранной передаточной функцией.
Принципиально корректирующие звенья могут включаться либо последовательно с основными звеньями САУ, либо параллельно им (существуют и комбинированные способы включения).
Наиболее удобно использовать корректирующее устройство последовательного типа, поскольку оно обеспечивает наиболее простую схему включения, не требует сложных элементов для согласования, передает значительные величины управляющих сигналов (тока, напряжения).
К достоинствам последовательной коррекции можно отнести: ускорение переходного процесса, снижение установившейся ошибки, простоту включения элементов коррекции.
К недостаткам можно отнести: увеличение чувствительности к помехам, необходимость согласования сопротивления корректирующих элементов с входным и выходным сопротивлением элементов системы, к которым они подключаются и снижение величины основного сигнала.
Передаточная функция желаемой системы определяется из выражения:
 ,
(93)
,
(93)
где W – передаточная функция разомкнутой системы;
Wк– передаточная функция корректирующего устройства.
Логарифмируя выражение для Wжполучим:
 .
(94)
.
(94)
Логарифмическая характеристика корректирующего устройства:
 ,
(95)
,
(95)
где Lж– логарифмическая характеристика желаемой системы;
L – логарифмическая характеристика разомкнутой системы.
Вычитание производится графически.
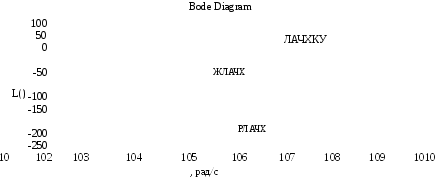
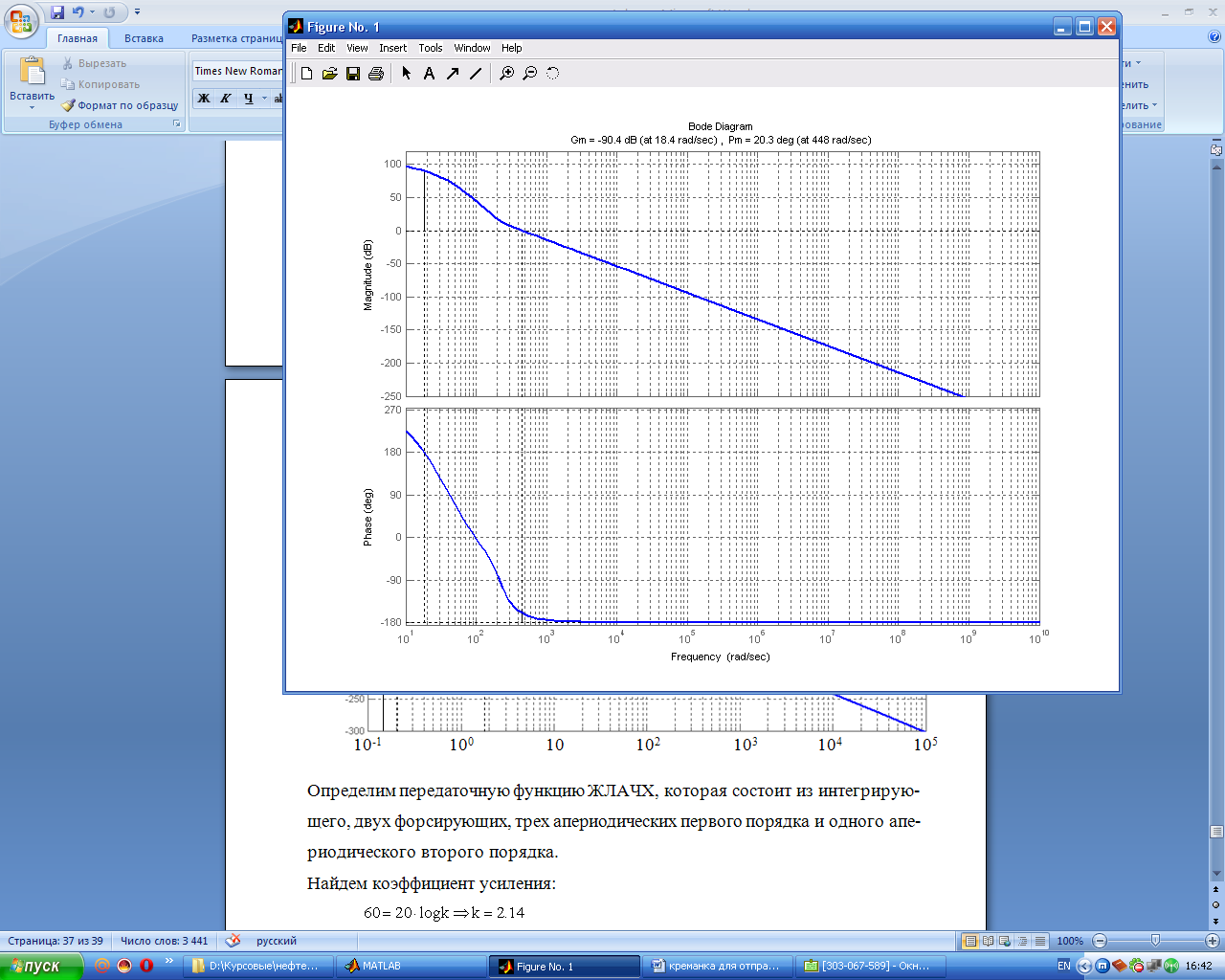
Рисунок 12 – ЛАЧХ корректирующего устройства
Наклоны ЛАЧХКУ: 0 +20
Передаточная функция корректирующего устройства:
 .
(96)
.
(96)
1-й участок: 20 - 0 = 20.
 .
(97)
.
(97)
Из графика корректирующего устройства частоты сопряжения Lкуопределяются: λ= 2000 (с-1).
Тогда
постоянная времени Lку: .
.
Передаточная функция корректирующего устройства:
 .
(98)
.
(98)
7 РАЧЕТ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА.
7.1 Расчет аналогового корректирующего устройства
Аналоговое корректирующее устройство (КУ) в виде RC– цепочки, соответствующее ЛАЧХ корректирующего устройства (рисунок) представлено на рисунке 13.
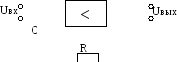
Рисунок 13 – Схема аналогового КУ
Выбранная цепочка имеет один конденсатор и один резистор, зададим R= 4кОм;T=0.0005.
Рассчитаем значение параметров элементов:
 .
(99)
.
(99)
Значения параметров элементов:
R= 1кОм;
С = 5 мкФ.
Тогда передаточная функция будет иметь вид:
 .
(100)
.
(100)
В разрабатываемой системе присутствует микропроцессор, с помощью которого можно реализовать коррекцию. В зависимости от способа включения микро-ЭВМ различают последовательную и параллельную коррекцию, в данном случае используется последовательная коррекция.
Последовательная коррекция с помощью управляющей программы служит для непосредственного преобразования сигнала рассогласования. В качестве корректирующего устройства для данной системы выбран операционный усилитель.
7.2 Расчет дискретного корректирующего устройства
Коррекцию системы можно произвести при помощи программы для микропроцессора, которая будет реализовывать передаточную функцию корректирующего устройства.
Чтобы составить программу необходимо найти разностное уравнение в реальном масштабе времени.
После
замены
 ,
, ,
передаточная функция корректирующего
устройства примет вид:
,
передаточная функция корректирующего
устройства примет вид:
 .
(101)
.
(101)
Далее умножим числитель и знаменатель на z-1, получим:
 .
(102)
.
(102)
Разностное уравнение системы выглядит следующим образом:
 ,
(103)
,
(103)
где
 – входная функция;
– входная функция;
 – выходная функция.
– выходная функция.
Реализация разностного уравнения на языке Assemblerимеет вид:
;Расчет разностного уравнения

;X – входной сигнал
;Y – выходной сигнал
A1EQU-1; задаем постоянные коэффициенты
А2
EQU- ;
задаем постоянные коэффициенты
;
задаем постоянные коэффициенты
В1 EQU 1; задаем постоянные коэффициенты
В2 EQU 1; задаем постоянные коэффициенты
X0,X1DB0;
выделение памяти под ,
,
Y0,Y1DB0;
выделение памяти под ,
,
iportEQU11h; номер порта для чтения
oportEQU12h; номер порта для записи
start: метка начала цикла коррекции
inal,iport; читаем из порта данные
MOVX0,al;
MULa1,A1; вычисление
слагаемого
MOVb1,a1; сохранение результата вb1
MOVa1,X1;
MULa1,A2; вычисление
слагаемого
SUBb1,a1; вычисление
слагаемого ,
запись результата в регистрb1
,
запись результата в регистрb1
MOVa1,Y0;
MULa1,B1; вычисление
слагаемого
ADDb1,a1; вычисление
слагаемого ,
запись результата в регистрb1
,
запись результата в регистрb1
MOVa1,Y1;
MULa1,В2; вычисление слагаемого
ADDb1,a1; вычисление слагаемого
 ,
запись результата в регистр b1
,
запись результата в регистр b1
MOVY2,Y1; сохранение значений для следующего такта
MOVY1,Y0; сохранение значений для следующего такта
MOVY0,b1; сохранение значений для следующего такта
MOVX2,X1; сохранение значений для следующего такта
MOVX1,X0; сохранение значений для следующего такта
MOVX0,a1; сохранение значений для следующего такта
outоport,b1; вывод управляющего сигнала изb1
JMPstart; замыкание цикла.
Блок-схема возможной процедуры коррекции изображена на рисунке 18:

Рисунок 14 – Блок-схема программы коррекции
К достоинствам последовательной коррекции можно отнести:
- ускорение переходного процесса;
- снижение установившейся ошибки;
- простота включения элементов коррекции;
К недостаткам можно отнести:
- увеличение чувствительности к помехам;
- необходимость согласования сопротивления корректирующих элементов с входным и выходным сопротивлением элементов системы, к которым они подключаются.
Мощным методом коррекции стало применение программных корректирующих устройств на микропроцессорах, применение которых позволяет варьировать параметры в широких пределах и быстро их изменять без изменения технического исполнения системы. Еще одним достоинством данного способа является точное выполнение зависимостей корректирующего устройства, тогда как для аналоговых корректирующих устройств трудно добиться точности, так как трудно точно подобрать номинал элементов в соответствии с расчетным. Предпочтения отдаются программным средствам коррекции.
Поскольку в системе уже есть встроенный МП, то применение аналогового корректирующего устройства экономически нецелесообразно, поэтому выбираем программную коррекцию.
ЗАКЛЮЧЕНИЕ
В ходе курсового проектирования разработана система управления нефтепереработкой, которая работает на базе микропроцессорного управления.
Система проверена на устойчивость и произведена ее коррекция последовательным корректирующим устройством для улучшения параметров работы системы.
В качестве КУ может быть использована как RC– цепочка, так и управляющая программа на языкеAssembler. Поскольку в САУ имеется МП, то для наиболее полного использования его возможностей, предпочтительней КУ реализовать в качестве рабочей программы.
Таким образом, по завершению разработки курсового проекта получена дискретная система автоматического управления, удовлетворяющая требованиям, поставленным в техническом задании.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Агейкин Д.И.Датчики контроля и регулирования: Справочник / Д. И.
Агейкин, Е. Н. Костина, Н. Н. Кузнецова. – М.: Машиностроение, 1965. – 98 с.
2. Бесекерский В. А., Попов Е. П., Теория систем автоматического регу-
лирования / В. А. Бесекерский - М.: Наука, 1996. – 992 с.
3. Бобриков С. А., Тихончук С. Т., Кузнецов А. А., Проектирование цифро-
вой следящей системы / С. А. Бобриков - Одесса: ОПУ, 1999. - 21 с.
4. Солодовников В. В., Плотников А. В., Основы теории и элементы САР /
В. В. Солодовников - М: Машиностроение, 1985.
5. Клюев А. С. Автоматическое регулирование.– М.: Энергия, 1973. – 392 с.
6. Топчеев Ю. И., Учебное пособие для вузов. Атлас для проектирования
систем автоматического регулирования / Ю. И. Топчеев - М.: Машино-
строение, 1989. - 752 с.
7. Тюкин В. Н., Теория управления: Конспект лекций. Часть 1. Обыкновен-
ные линейные системы управления / В. Н. Тюкин - Вологда: ВоГТУ,
2000. - 200 с.: ил.
8. Шаталов А. С., Теория автоматического управления. Учебное пособие
для вузов / А. С. Шаталов - М.: Высшая школа, 1977.
9. Юревич Е.И., Теория автоматического управления / Е. И. Юревич - М.:
Энергия, 1969. – 640с.
12. Справочник по электрическим машинам в 2 т./ Под общей редакцией
И.П. Копылова и Б.К. Клокова Т.1. – М.: Энергоиздат, 1988. – 456 с.: ил
№ документа