

0 40 88.2 160 320 640 1280 H(t) t, c
Рисунок 7 - График переходного процесса дискретной системы управления
нефтепереработкой
Согласно графику, представленный на рисунке 7, переходный процесс дискретной системы управления нефтепереработкой приходит в устойчивое состояние, что свидетельствует об устойчивости системы. Для улучшения характеристик системы необходимо ввести корректирующее устройство.
5 ПОСТРОЕНИЕ ЛАЧХ и ее анализ
Для дальнейшего исследования найдем передаточную функцию разомкнутой системы и проведем ее z – преобразование.
Передаточная функция разомкнутой системы имеет вид:

, (87)

.
Переход от операторной формы к z–форме выполняется по формуле:
W(z)=
где
 -
фиксатор нулевого порядка,
-
фиксатор нулевого порядка,
 –
z-форма непрерывной части системы
автоматического регулирования.
–
z-форма непрерывной части системы
автоматического регулирования.
Проведем z-преобразование, для этого воспользуемся программным пакетомMatlab.
Сначала создадим LTI-объект, с помощью функции:
>> w=tf([3.7*10^3 3.1*10^5 3.4*10^-4 4.9*10^10-2 2.3 43 47 14 0],[1.8*10^-2 3.2 2*10^2 5.7*10^3 6.6*10^4 9.1*10^4 4.3*10^4 5.5*10^5 1.5*10^7 4.9*10^6 0]).
Затем
проведем z-преобразование,
задав при этом шаг дискретизации с, с помощью функции:
с, с помощью функции:
>> Wz=c2d(w,3600).
Тогда получим передаточную функцию дискретной разомкнутой системы:
 Заменим
z на выражение от псевдочастоты :
Заменим
z на выражение от псевдочастоты :
. (88)
z
=
 ,
,
где
 .
.
Воспользуемся программным пакетом Mathcad, получим:
,



,
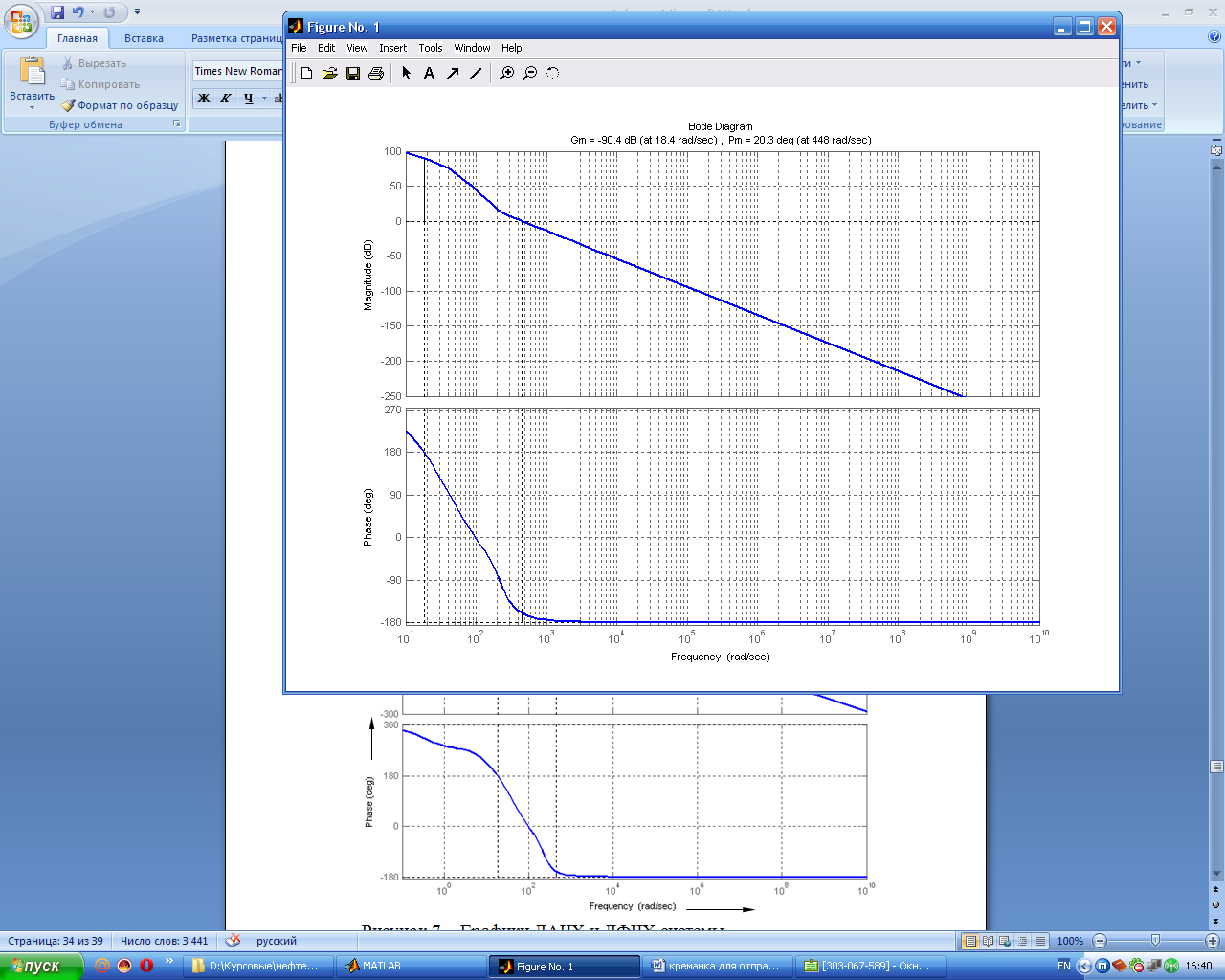
Построим логарифмическую амплитудно-частотную характеристику (ЛАЧХ) и логарифмическую фазо - частотную характеристику (ЛФЧХ) системы управления в программе Matlabс помощью функцииmargin.



100
50
0
-50
-100
-150
-200
-250
270
180
90
0
-90
-180
10 102 103 104 105 106 107 108 109 1010
L()
φ()
, рад/с
Рисунок 8 – Графики ЛАЧХ и ЛФЧХ системы
Запас устойчивости по фазе определяется превышением графика ЛФЧХ над прямой -на частоте пересечения ЛАЧХ нулевого уровня. В данном случае запас по фазе равен=-90.4.
Запас устойчивости по амплитуде определяется превышением графика ЛАЧХ над осью частот на частоте пересечения ЛФЧХ с осью -. Запас по амплитуде равенL=20.3. Данные запасы устойчивости удовлетворяют требованиям системы автоматического управления, разрабатываемая система полностью соответствует техническому заданию, то есть: время регулирования – 88.2 с, перерегулирование -24.29 %, система устойчива, как аналоговая, так и дискретно.
6 ПОСТРОЕНИЕ ЖЛАЧХ, ЛАЧХ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
Желаемой называют асимптотическую ЛАЧХ разомкнутой системы, имеющей желаемые (требуемые) статические и динамические свойства.
Желаемая ЛАЧХ (ЖЛАЧХ) состоит из трех основных асимптот: низкочастотной, среднечастотной и высокочастотной.
Среднечастотная асимптота ЛАЧХ разомкнутой системы и ее сопряжение с низкочастотной определяют динамические свойства системы – устойчивость и показатели качества переходной характеристики.
Поскольку в исходной САУ присутствует дискретное устройство, построение желаемой ЛАЧХ ведется методом запретной зоны.
Построение ЖЛАЧХ начинаем с построения запретной зоны, для чего необходимо найти координаты рабочей точки, для этого нужны следующие данные:
 об/сек - скорость изменения входного
сигнала;
об/сек - скорость изменения входного
сигнала;
 об/сек2– ускорение изменения;
об/сек2– ускорение изменения;
 – допустимая ошибка.
– допустимая ошибка.
Найдем значение частоты рабочей точки:
 (с-1). (89)
(с-1). (89)
Найдем значение амплитуды рабочей точки:
 .
(90)
.
(90)
Таким образом, рабочая точка имеет следующие координаты:
 .
.
Через
полученную точку
 проводим прямую с наклоном -20 дБ/дек.
Эта прямая является верхней границей
запретной зоны.
проводим прямую с наклоном -20 дБ/дек.
Эта прямая является верхней границей
запретной зоны.
По
номограмме Солодовникова (рисунок 12) и
заданному в техническом задании желаемому
перерегулированию
 %
и времени регулирования
%
и времени регулирования
 cопределяем частоту
среза:
cопределяем частоту
среза:
 (с-1),
(91)
(с-1),
(91)
 .
.
tp, c σ,%