

7 Выбор и расчет корректирующего устройства
Для того чтобы синтезировать корректирующее устройство необходимо выбрать тип корректирующего устройства. Для коррекции исходной системы автоматического регулирования выбираем последовательное корректирующее устройство.
Преимущество последовательных корректирующих устройств заключается в том, что они могут быть осуществлены в виде простых пассивных RC-контуров и обеспечивают наиболее простую схему включения, не требует сложных элементов для согласования, передает значения величин управляющих сигналов (тока, напряжения), кроме того, расширяет полосу пропускания частот при наличии дифференцирующих звеньев в цепи регулирования, что позволяет передавать большую мощность сигнала.
Параллельное корректирующее устройство в исходной схеме автоматического регулирования применить сложно. Параллельные корректирующие устройства требуют высоких коэффициентов усиления. Применение параллельного корректирующего устройства приведет к ослаблению коэффициента усиления всей системы в целом, что недопустимо в заданной системе, так как исходная система имеет небольшой коэффициент усиления.
Синтез последовательного корректирующего устройства основан на использовании соотношения:
![]() .
(68)
.
(68)
Для построения логарифмической амплитудно-частотной характеристики корректирующего устройства необходимо из желаемой логарифмической амплитудно-частотной характеристики вычесть логарифмическую амплитудно-частотную характеристику неизменяемой части.
Логарифмическая амплитудно-частотная характеристика последовательного корректирующего устройства описывается уравнением:
![]() ,
(69)
,
(69)
где
![]() - желаемая логарифмическая
амплитудно-частотная характеристика;
- желаемая логарифмическая
амплитудно-частотная характеристика;
![]() -
логарифмическая амплитудно-частотная
характеристика неизменяемой части.
-
логарифмическая амплитудно-частотная
характеристика неизменяемой части.
ЛАЧХ последовательного корректирующего устройства представлена на рисунке 14.

1 – Исходная ЛАЧХ; 2 – желаемая ЛАЧХ; 3 – исходная ЛАЧХ поднятая на уровень желаемой ; 4 – ЛАЧХ корректирующего устройства.
Рисунок 14 – Построение логарифмической амплитудно-частотной характеристики корректирующего устройства
Из рисунка видно, что логарифмическая амплитудно-частотная характеристика корректирующего устройства имеет наклон минус 0 дБ/дек до частоты λк1=40 рад/с, затем наклон меняется и до частоты λк2=120 рад/с он становится равным минус 20 дБ/дек, а после частоты λк2 наклон логарифмической амплитудно-частотной характеристики корректирующего устройства становится неизменным и составляет 0 дБ/дек.
Корректирующее устройство можно реализовать в виде RC-контура, изображенного на рисунке 15.
Передаточная функция в этом случае принимает вид:
![]() (70)
(70)
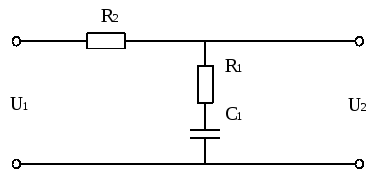
Рисунок 15 – Реализация непрерывного корректирующего устройства
Причем для постоянных времени справедливы следующие соотношения:
![]() (71)
(71)
![]() (72)
(72)
По виду ЛАЧХ корректирующего звена установлено:
![]() с,
с,
![]() с.
с.
Пусть величина емкости составляет
![]() мкФ
мкФ
Тогда необходимо выбрать сопротивления резисторов:
![]() (Ом),
(Ом),
![]() (Ом).
(Ом).
Полученное таким образом последовательное корректирующее устройство предлагается включить между усилителем и контактором. Данный подход имеет все основания быть справедливым, так как сигналы электрической природы. Результирующая схема системы автоматического регулирования с учетом корректирующего устройства (КУ) загрузки бункера дробилки примет вид рисунка 16.
Другой формой корректирующего устройства может являться дискретное корректирующее устройство, реализованное в виде программы и исполняемое на микропроцессоре.
Выше была получена передаточная функция корректирующего устройства:
![]() . (73)
. (73)
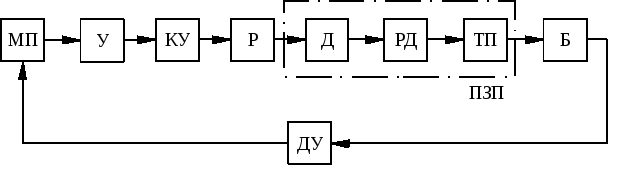
Рисунок 16 – Схема скорректированной системы автоматического регулирования с помощью непрерывного RC-контура
Произведем обратное z-преобразование. В этом случае:
![]() . (74)
. (74)
Передаточная функция корректирующего устройства в z-форме
![]() . (75)
. (75)
Выделим разностное уравнение:
![]() . (76)
. (76)
На основании разностного уравнения можно записать алгоритм корректирующей программ. Блок схема такого алгоритма изображена на рисунке 17.
Таким образом, рассмотренные два способа реализации корректирующих устройств – программный и аппаратный – имеют право на существование. Отличительная особенность аппаратных корректирующих устройств заключается в их высоком быстродействии. Однако реализации программной коррекции является более легкой и гибкой задачей и позволяет изменять параметры коррекции, не прибегая к аппаратным средствам.

Рисунок 17 – Блок-схема программы коррекции
ЗАКЛЮЧЕНИЕ
В ходе курсовой работы разработана система автоматического регулирования загрузки бункера дробилки, которая работает на базе микропроцессорного управления.
Производился выбор элементной базы для системы, заключавшийся в том, что для каждого элемента по его техническим характеристикам подобраны параметры и получены передаточные функции. Данная система подразумевает замкнутую архитектуру, то есть управление по отклонению контролируемой величины. В данном случае речь идет об уровни сырья в бункере и о датчике уровня, который опрашивается микропроцессором.
Сначала была рассчитана линейная часть системы на устойчивость, построены графики переходных процессов, определены динамические характеристики. Далее рассмотрена работа дискретной части, для нее подтверждено состояние устойчивой работы.
Ключевым этапом курсовой работы стало построение ЛАЧХ и ЛФЧХ системы, определены запасы устойчивости по амплитуде и по фазе. На данном этапе было решено проводить корректирование системы для вывода ее на характеристики, заданные в техническом задании. В результате было рассчитано и подобрано последовательное корректирующее устройство, с которым система вышла на необходимый уровень качества. Альтернативой данному подходу может стать применение дискретного корректирующего устройства в виде программы ЭВМ.
Таким образом, в результате синтеза была получена дискретная система автоматического управления, удовлетворяющая требованиям, поставленным в техническом задании.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Бессекерский В.А., Изранцев В.В. Системы автоматического управления с микроЭВМ. – М.: Наука, 1987. – 318с.
2. Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики. – М.: Высш. шк., 1986. – 334 с.
3. Гостев В.И., Лесовой Е.П. Применение оптимальных по быстродействию цифровых регуляторов для объектов управления с чистым запаздыванием. – Санкт-Петербург: Машиностроение, 1999. – 528 с.
4. Зельченко В.Я., Шаров С.Н. Расчет и проектирование автоматических систем с нелинейными динамическими звеньями. – Л.: Машиностроение, 1986. – 174 с.
5. Скоробогатова Т.Н. Разработка и расчет локальных систем автоматики /Т.Н. Скоробогатова // Методические указания для студентов специальности УИТ. – Балаково, 2007. – 13 с.
6. Топчеев Ю. И. Атлас для проектирования систем автоматического регулирования. - Москва: Энергоиздат, 1988. – 345 с.
7. Яценков В.С. Микроконтроллеры Microchip. Практическое руководство. – М.: Горячая линия-Телеком, 2002. – 296 с. ил.
8. Бойко Г.М. Нормоконтроль оформления дипломного (курсового) проекта (работы) / Г.М. Бойко, В.К. Власова // Методические указания для студентов специальности УИТ. – Балаково, 2007. – 51 с.
УИТС.423723.118
ПЗ
Лист Дата Подпись № докум. Лист Изм.








