

2.6 Выбор пропеллера
Вентилятор (или пропеллер) радиальный (центробежный) ВР132-30-6.3 принадлежит к классу вентиляторов с колесами барабанного типа. Он имеет максимально возможное значение коэффициента расхода и полного давления при достаточно высоком КПД. Вентилятор отличается меньшими габаритными размерами и массой по сравнению с аналогами (например, В-Ц14-46 и АВДм-3,5.2-01).
Передаточная функция пропеллера запишется в виде:
![]() .
.
Причем коэффициент усиления:
![]() (кг/об), (10)
(кг/об), (10)
где
![]() - производительность установки, кг/с,
- производительность установки, кг/с,
![]() -
частота вращения пропеллера вентилятора,
об/с.
-
частота вращения пропеллера вентилятора,
об/с.
Следовательно, передаточная функция пропеллера:
![]() .
.
2.7 Выбор бункера
Бункер-накопитель БН-4 используется для хранения различных сыпучих веществ и продуктов. Аргументом в пользу выбора модели БН-4 является тот факт, что это продукт отечественного производства и его стоимость ниже импортных аналогов.
Движущие элементы отсутствуют.
Загрузка бункера осуществляется любым транспортным средством (все виды транспортеров, нории).
Разгрузка осуществляется самотеком в любое транспортное устройство.
Бункер-накопитель БН-4 широко используется в составе комплексов по производству комбикорма.
Технические характеристики бункера-накопителя БН-4 описаны ниже.
Емкость, м3 4.
Диаметр выгрузного отверстия, мм 500.
Высота до выгрузного отверстия, мм 750.
Габаритные размеры, мм 2100х2100х3589.
Объект регулирования является устойчивым звеном первого порядка, и его передаточную функцию найдем по формуле:
![]() .
(11)
.
(11)
Коэффициент передачи будет равен:
![]() (м/кг), (12)
(м/кг), (12)
где h = 3,589 – высота бункера, м;
V = 4 – объем бункера, м3;
ρ3
= 1500 - плотность зерна,
![]() .
.
Постоянная времени объекта регулирования найдем по формуле:
![]() , (13)
, (13)
где
![]() - площадь горизонтального сечения
бункера, м2.
- площадь горизонтального сечения
бункера, м2.
В результате получим:
![]() (с).
(с).
Получим передаточную функцию:
![]() .
.
2.8 Выбор датчика уровня
В качестве датчика уровня предлагается вибрационные датчик предельного уровня Soliphant Т FTM 260, который является классическим универсальным инструментом и применяется для любых видов сыпучих продуктов. Конструктивно датчик выполнен в форме камертона (вилки), одна из половин которого служит источником колебаний, генерируемых пьезокристаллом, а вторая - приемником. Принцип работы основан на срабатывании датчика в момент измерения амплитуды колебаний в результате соприкосновения с сыпучим продуктом, появляющимся между пластинами. Сигнал, генерируемый в момент срабатывания, преобразуется в управляющий сигнал. Точность срабатывания (в пределах ±5 мм по горизонтали и ±10 мм по вертикали) достигается в любых конструкциях. Soliphant может быть смонтирован на верхней или боковой поверхности емкости (бункера).
Основные выполняемые функции - определение максимального уровня сыпучего продукта в емкости.
Основные характеристики датчика предельного уровня описаны ниже.
Температура рабочей среды, °C от минус 40 до плюс 150.
Давление рабочей среды, бар от минус 1 до плюс 16.
Диапазоны измерений, м 20.
Размер частиц сыпучего продукта, мм 10.
Выходной сигнал, В 19 ÷ 220.
Для данного датчика основной характеристикой по выходу является время срабатывания, которое при покрытии материалом вилки составляет 0,6 с, а при освобождении материала – 1,4 с. Выберем наиболее худший – последний – вариант.
Следовательно:
![]() .
.
Пользуясь
соотношением
![]() ,
определим величину постоянной времени
датчика:
,
определим величину постоянной времени
датчика:
![]() с.
(14)
с.
(14)
Передаточная функция датчика данного типа рассчитывается по формуле:
![]() , (15)
, (15)
где
![]() - коэффициент усиления датчика уровня,
В/м;
- коэффициент усиления датчика уровня,
В/м;
![]() -
постоянная времени датчика уровня, с.
-
постоянная времени датчика уровня, с.
Коэффициент передачи определим по статической характеристике (которая имеет вид рисунка 3):
![]() (16)
(16)
где U – максимальное выходное напряжение, В;
h – максимальный допустимый уровень загрузки бункера (уровень регулирования), м.
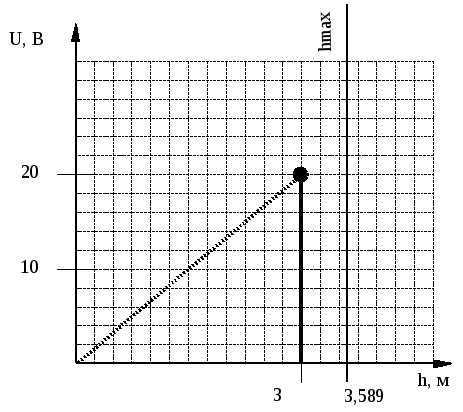
Рисунок 3 – Статическая характеристика датчика уровня зерна в бункере
В результате получим передаточную функцию датчика уровня:
![]() .
.