

1.1 Технические характеристики системы регулирования
Разрабатываемая система автоматического регулирования температуры и давления воздушной смеси аппарата искусственной вентиляции легких, должна обеспечивать ряд характеристик.
Время установления рабочего режима, с не более 60.
Частота опроса датчиков, с 1.
Перерегулирование, % 30.
Диапазон регулирования давления, кПа от 10 до 20.
Диапазон регулирования температуры, °С от 0 до 37.
Рабочий диапазон температур, °С от 0 до плюс 50.
Производительность, т/ч до 15.
Напряжение питания, В 380.
Потребляемая мощность, кВт 22.
Наработка на отказ, ч 5000.
Масса, кг 360.
Экономические требования: применение предлагаемой системы регулирования позволит автоматизировать процесс подачи сырья в бункер, то есть двинуться навстречу экономии общественного труда и исключить рутинные операции рабочего персонала; с другой стороны экономически целесообразно применение системы по отслеживанию уровня сырья в бункере, что исключит работу дробилки в холостом режиме.
Эксплуатационные требования: данная система является мобильной и при необходимости может быть в кратчайшие сроки переведена в другое производственное помещение, а также может использоваться для контроля уровня сырья иных технологических стадий.
1.2 Функциональная схема системы регулирования
Работа системы автоматического регулирования загрузки бункера дробилки заключается в поддержании требуемого уровня зерна.
Система функционирует следующим образом (см. рисунок 1): с выхода задающего устройства, роль которого выполняет микропроцессор (МП), поступает сигнал на изменение режима работы данной системы, который усиливается усилителем напряжения (У). Далее сигнал поступает на контактор-реле (Р), осуществляющий пуск-останов исполнительной части схемы – погрузчик зерна пневматический (ПЗП). Последний представляет собой комплекс из двигателя (Д), редуктора (РД) и пропеллера (ПР). Исполнительное устройство формирует воздушный поток, который и отвечает за подачу зерна в бункер. Для отслеживания уровня сырья в бункере установлен датчик уровня (ДУ), который непосредственно связан с микропроцессором.
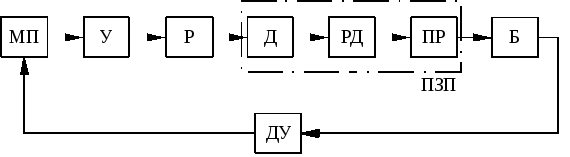
МП – микропроцессор; У – усилитель; Р – реле; ПЗП – погрузчик зерна пневматический; Д – двигатель; РД – редуктор; ПР – пропеллер; Б –бункер;
ДУ – датчик уровня.
Рисунок 1 – Функциональная схема системы автоматического регулирования загрузки бункера дробилки
2 ВЫБОР И ОБОСНОВАНИЕ ВЫБОРА ЭЛЕМЕНТНОЙ БАЗЫ СИСТЕМЫ УПРАВЛЕНИЯ
2.1 Выбор микропроцессора
Одним из важнейших устройств в любой системе автоматического регулирования можно считать устройство сравнения, от точности проведенной им операции будет зависеть насколько точным окажется регулирование. Следует достаточно тщательно подойти к выбору этого элемента.
Микропроцессор характеризуется очень большим числом параметров и качеств, поскольку он, с одной стороны, функционально является сложным программно - управляемым цифровым процессором, то есть устройством ЭВМ, а с другой – интегральной схемой (схемами) с высокой степенью интеграции элементов, то есть электронным прибором. Поэтому для микропроцессора важны такие качества и параметры, как тип корпуса, количество источников питания, требования к синхронизации, мощность рассеивания, температурный диапазон, возможность расширения разрядности, наличие встроенных ЦАП и АЦП, помехоустойчивость, нагрузочная способность, объединения сигналов на выходах, надежность, долговечность. Микропроцессор как функциональное устройство ЭВМ обеспечивает эффективное автоматическое выполнение операций обработки цифровой информации в соответствии с заданным алгоритмом.
В данной системе регулирования информация с датчика имеет аналоговый вид, поэтому целесообразнее подобрать такой микроконтроллер, который бы включал в себя аналого-цифровой преобразователь. Среди широкого круга микропроцессорных устройств был выбран PIC-микроконтроллер фирмы Microchip PIC16C74. /7/
Технические характеристики микроконтроллера PIC16C74 представлены ниже.
Максимальная тактовая частота, МГц 20.
Память программ, кБайт 4.
Память данных, Байт 192.
Количество таймеров 3.
Захват/Количество/ШИМ 2.
Каналы АЦП (8 бит) 8.
Внешнее прерывание да.
Источники прерывания 12.
Входы/выходы 33.
Напряжение питания, В 2,5 ÷ 6.
Количество команд 35.
Уровни на входах/выходах PIC-микроконтроллера будут соответствовать уровням ТТЛ, то есть напряжению питания.
Передаточная функция микроконтроллера как цифрового устройства:
![]() .
.