

6.2 Построение корректирующего звена
Построив ЛАЧХ и ЖЛАЧХ, переходим к построению корректирующего устройства системы.
В случае комбинированной САР можно выполнить корректировку двумя способами:
- с помощью включения дополнительного звена корректировки в последовательную цепь, выполненного на резисторах и конденсаторах.
- программно, при помощи написания программы корректировки и тогда МП будет сам регулировать систему в нужном направлении.
Рассмотрим только один способ корректировки (первый) – аналоговый.
По графику 6 выполним построение корректирующего звена при условии, что
Lк=Lж-L (32)
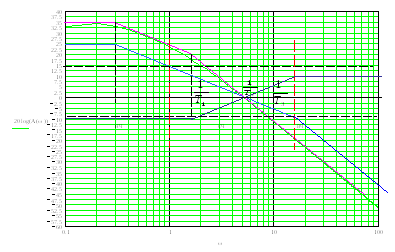
График 6 – Построение ЖЛАЧХ и корректирующего звена
7 Расчет корректирующего устройства
Разобьем корректирующее устройство на два последовательно соединенных через усилитель. Таким образом, мы получим передаточные функции простых схем коррекции и учтем усиление ("подъем"), выполненное после построения реальной ЛАЧХ (рисунок 4)
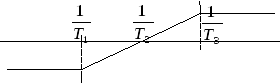
Рисунок 4 – корректирующее звено.
Электрическая схема представлена на рисунке 5.
Р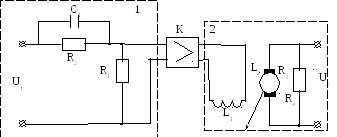 исунок
5 – Электрическая схема корректирующего
устройства
исунок
5 – Электрическая схема корректирующего
устройства
Корректировке 1 соответствует передаточная функция:
![]() (33)
(33)
где
![]() (34)
(34)
![]() (35)
(35)
![]() (36)
(36)
![]() (37)
(37)
По графику 6 определим коэффициенты
![]() (38)
(38)
![]() (39)
(39)
где
![]()
![]()
тогда
![]()
![]()
По формулам (34),
(35) определим
![]() ;
;
![]() .
.
Зададим значение
![]()
![]() (40)
(40)
![]() (41)
(41)
![]() (42)
(42)
тогда
![]()
![]()
![]()
Подставляя все найденные параметры в формулу (33) получим передаточную функцию вида:
![]() (43)
(43)
Корректирующему устройству 2 соответствует передаточная функция вида:
![]() (44)
(44)
![]() (45)
(45)
![]() (46)
(46)
![]() (47)
(47)
![]() (48)
(48)
![]()
Зададим значения
![]()
По графику 6
определим
![]() .
.
Из формулы (47) определим
![]() (49)
(49)
![]()
Из формулы (46) определим
![]() (50)
(50)
![]()
Тогда
![]() (51)
(51)
Общая передаточная функция корректирующего устройства имеет вид:
![]()
![]() (52)
(52)
Корректирующее устройство, реализованное на R-C-цепочке и тахогенераторе, устанавливаем в систему после усилителя. Выбор именно этого места обосновывается тем, что, так как после микропроцессора и датчика сигнал слишком мал, а R-C-цепочки вносят на определенной полосе частот значительные искажения в электрический сигнал малой мощности. Поэтому единственным местом в системе, куда целесообразно установить корректирующее устройство, является электрическая цепь после усилителя. Так же последовательно к корректирующему устройству подключаем дополнительный усилитель для осуществления первой корректировки (поднятия ЛАЧЖ). Структурная схема скорректированной системы изображена на схеме 5.
З апас
устойчивости по фазе равен 30%
апас
устойчивости по фазе равен 30%
Схема 5 – Структурная схема скорректированной системы
Построим переходный процесс, определим передаточные функции разомкнутой и замкнутой скорректированной системы.
Передаточная функция разомкнутой системы:
![]() (53)
(53)
Передаточная функция замкнутой системы (54):
![]()
Используя программу Mathcad, построим ЛФЧХ и переходный процесс скорректированной системы.
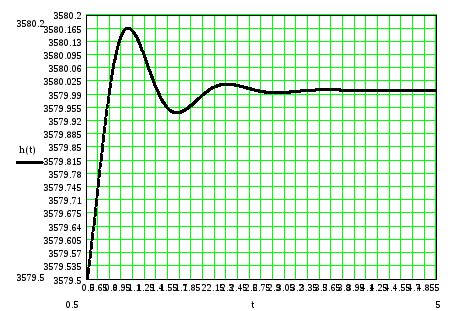
Г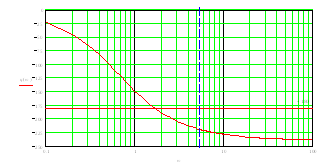 рафик
7 – Переходный процесс скорректированной
системы
рафик
7 – Переходный процесс скорректированной
системы
График 8 – Фазо-частотная характеристика скорректированной системы
ЗАКЛЮЧЕНИЕ
В данном курсовом проекте была спроектирована и разработана система автоматического регулирования намотки бумажной ленты. Были выбраны необходимые элементы системы, просчитаны их передаточные функции.
Производилась проверка системы на устойчивость и коррекция системы последовательным корректирующим устройством для обеспечения лучших параметров работы и усиления мощности сигнала. Время регулирования системы составляет 2с (построен график переходного процесса), запас устойчивости по амплитуде 14Дб (по номограмме Солодовникова), запас устойчивости по фазе 27% (по номограмме Солодовникова, по построенному графику в пределах 27-30%).
Рассчитанные показатели удовлетворяют необходимым условиям.