

Министерство образования Российской Федерации
Уфимский Государственный Авиационный Технический Университет
Кафедра АТС
Курсовая работа
по
«Теории автоматического управления»
на тему
СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ (САР)
Уфа-2003
Содержание.
1. Введение…………………………………………………………………..стр. 3
2. Задание на курсовую работу………………………………………стр. 4
3. Анализ исходных данных…………………………………………….стр. 5
4. Анализ процесса резания…………………………………………….стр. 7
5. Разработка структурной схемы САР ……………………………..стр. 9
6. Анализ устойчивости некорректированной САР……………..стр. 11
7. Синтез САР с заданными показателями качества…………стр. 12
8. Анализ качества САР…………………………………………………….стр. 13
9. Анализ управляемости и наблюдаемости………………………стр. 15
10. Заключение………………………………………………………………..стр.17
11. Список литературы……………………………………………………..стр.18
1 Введение.
Теория автоматического регулирования изучается во всех высших технических учебных заведениях в качестве одной из базовых дисциплин. На ее основе в дальнейшем читаются такие курсы, как теория автоматического управления, автоматизированные системы переработки информации, управление технологическими и организационно – экономическими процессами, теория автоматизированного проектирования систем и их математическое обеспечение, теория принятия инженерных решений, а также целый ряд дисциплин специального назначения. Объекты и устройства систем регулирования отличаются по своей физической природе и принципам построения, поэтому проектировщику необходимо не только иметь хорошую подготовку в области механики, электротехники, электроники, но и уметь учитывать специфические особенности объекта. С целью овладения практическими навыками использования методов теории автоматического регулирования будущие специалисты в процессе обучения выполняют домашние задания, курсовые и дипломные работы по проектированию систем управления конкретными объектами.
Трудность выполнения проектных работ в значительной степени определяется сложностью математического аппарата, используемого при описании объектов и систем автоматического регулирования (САР). Для непрерывных объектов с сосредоточенными и распределенными параметрами – это обыкновенные дифференциальные и интегральные уравнения и дифференциальные уравнения в частных производных соответственно; а для объектов информация с которых снимается в дискретные моменты времени, - разностные уравнения. В такой форме описываются в частности, и процессы в управляющих вычислительных машинах, получивших к настоящему времени весьма широкое распространение в САР.
Теория автоматического управления и регулирования – наука, которая изучает процессы управления, методы их исследования и основы проектирования автоматических систем, работающих по замкнутому циклу, в любой области техники. Целью данной работы является проектирование системы автоматического управления (САР) среднеквадратической температурой в области резания. Данная САР должна поддерживать температуру в области резания на заданном уровне с определенной точностью и отвечать требованиям точности и быстродействия. Метод анализа и синтеза САР, примененный в данной работе - это метод с использованием логарифмических частотных характеристик (ЛЧХ) системы. Он является наиболее удобным, благодаря простоте, наглядности и точности, и поэтому используется в данной работе.
2 Задание на курсовую работу.
Оптимальная температура в зоне резания обеспечивает минимум интенсивности изнашивания режущего инструмента. При точении жаропрочного сплава ХН77ТЮР резцом ВК6М с параметрами заточки rв=1 мм; =0; =1=100; =1=450 оптимальная температура 0 составляет 7200С. Температура в зоне резания для данной пары «инструмент-деталь» определяется выражением:
0 = 267*(V^0.384)*(S^0.132)*(tп^0.098), 0С (1)
Для поддержания температуры в зоне резания на уровне 0 с заданной точностью +-3% изменяем V, регулируя скорость вращения двигателя шпинделя n дш, при неизменном задании Sз.
Произвести синтез САР температуры резания с запасами устойчивости по фазе =500, по модулю L6 дб, обеспечивающей заданную точность поддержания температуры, при заданных величинах возмущений.
Данные: вариант 62
Двигатель 2ПН180LYХЛ4, мощность 7.1 кВт, напряжение 110 В, Rя=0.065 Ом, Lя=2.25 мГн, Jном=0.23 кг*м^2.
Vд=20 м/мин, Sз=0,11 мм/об, nном=750 об/мин, КПД=80 %,
t п мин=0.5 мм, t п макс=0,8 мм.
Тду=0.0 с. Тпу=0.009 с.
Преобразователь энергии: Т1= 0.103 с., Т2=0.170 с.
Тс=0.0 с.
3. Анализ исходных данных
Схема взаимодействия электропривода и процесса резания приведена на рис. 1:
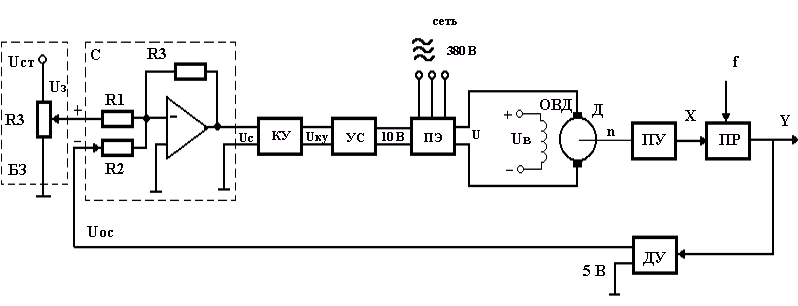
САР регулирует выходную координату процесса резания с заданной точностью. Процесс резания на схеме обозначен функциональным блоком ПР, управляющая координата ПР обозначена Х, возмущающее воздействие f. Передаточное устройство – это механическая система, преобразующая механическую энергию вала двигателя в механическую энергию управляющего воздействия процессом резания. ПУ является линейным звеном. С точки зрения динамики является апериодическим звеном первого порядка с постоянной времени ТПУ. Двигатель Д преобразует электрическую энергию в механическую энергию вращения вала. Двигатель является машиной постоянного тока с независимым возбуждением. Возбуждение машины осуществляется обмоткой ОВД. Поток возбуждения в процессе регулирования не изменяется и остается равным его номинальному значению. Регулирование скорости двигателя осуществляется изменением напряжения якоря U.
Преобразователь электрической энергии (ПЭ) преобразует электрическую энергию промышленной сети трехфазного переменного тока в электрическую энергию постоянного тока и регулирует величину выходного напряжения U, питающего цепь якоря двигателя Д. Преобразователь энергии является линейным звеном. Выходное напряжение U равно номинальному значению при напряжении управления 10 В. С точки зрения динамики процесса ПЭ представляет собой апериодическое звено второго порядка с постоянными времени Т1 и Т2.
УС - усилитель, является безынерционным звеном, усиливает напряжение, поступающее от корректирующего устройства.
КУ - корректирующее устройство. Корректирующее устройство корректирует динамические свойства САР. Статический коэффициент передачи КУ равен 1.
БЗ - блок задания, состоящий из источника стабилизированного напряжения и резистора R3, задает напряжение Uз величина которого определяет величину задания выходной координаты САР.
ДУ - измерительная система выходной координаты процесса резания. С точки зрения динамики представляет собой апериодическое звено первого порядка с постоянной времени ТДУ. При номинальном значении выходной координаты выдаёт напряжение Uос=5 В.
С - сумматор на базе операционного усилителя, безынерционное звено с коэффициентом передачи равным 1. суммирование осуществляется по алгоритму Uс=Uз-Uос.
Ф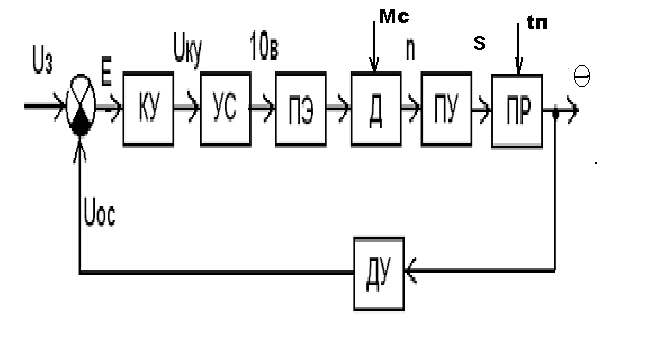 ункциональная
схема будет выглядеть так:
ункциональная
схема будет выглядеть так:
Иначе, по алгоритму функционирования данная САР является следящей. В ней выходная величина – температура в области резания – регулируется с заданной точностью при изменением напряжения на входе , т.е. система управляет выходной координатой. На вход системы подается напряжение Uз, соответствующее заданной температуре в области резания. Это напряжение сравнивается с напряжением Uос, поступающим с датчика обратной связи – например, естественной термопары. Если существует ненулевая разница этих напряжений – ошибка регулирования , то она с соответствующим знаком поступает на КУ, УС, ПЭ. ПЭ таким образом меняет напряжение на своем выходе, чтобы свести ошибку регулирования - путем изменения скорости вращения двигателя к минимуму или нулю. Если на систему действуют возмущения, то система с обратной связью будет компенсировать эти возмущения, поддерживая температуру в области резания постоянной.