

-
Способы регулирования частоты вращения двигателя постоянного тока.
Принципы регулирования частоты вращения в двигательном режиме реализуются в четырех основных способах регулирования:
1) реостатно-контакторное регулирование;
2) регулирование по системе «генератор — двигатель»;
3) регулирование по системе «управляемый выпрямитель — двигатель»;
4) тиристорно-импульсное регулирование.
Реостатно-контакторное регулирование. В настоящее время это управление широко применяется для регулирования частоты вращения двигателей малой и средней мощности, а иногда (на железнодорожном транспорте) и для мощных двигателей. Обычно при реостатно-контакторном управлении используются два метода регулирования: 1) при частотах вращения, меньших номинальной, в цепь якоря включают дополнительные сопротивления (Рис. 7 28). 2) при повышенных торного регулирования частоты вращения регулируют с последовательным. Машины малой мощности при отсутствии автоматизированного управления имеют два ползунковых регулировочных реостата, один из которых включен в цепь якоря, а другой — в цепь возбуждения. При больших мощностях, а также при необходимости автоматизации процесса сопротивления изменяют ступенчато (рис. 7.28) с помощью контакторов. Если требуется точное регулирование, то контакторов должно быть очень много, вся установка становится громоздкой, дорогой и сравнительно малонадежной. Реостатно-контакторная система при двигателях с параллельным возбуждением позволяет в зоне высоких частот вращения осуществлять рекуперативное торможение путем увеличения тока возбуждения. В зоне низких частот вращения применяют реостатное торможение, причем регулирование тормозного усилия осуществляют с помощью той же реостатно-контакторной установки, которая регулирует двигательный режим, после соответствующего переключения схемы. В связи со сложностью автоматизации и большими расходами на ремонт и эксплуатацию реостатно-контакторное управление в настоящее время постепенно заменяют более совершенными системами управления.
Регулирование по системе «генератор — двигатель. В этой установке (рис. 7.29) двигатель Д получает питание от автономного генератора Г с независимым возбуждением, который приводится во вращение каким-либо первичным двигателем ПД (например, электродвигателем, дизелем) Регулирование частоты вращения осуществляют изменением:
1) напряжения на якоре двигателя путем изменения тока возбуждения генератора /вГ;
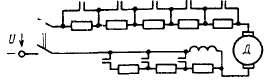
Рис. 7 28. Схема реостатно-контак-торного регулирования частоты вращения двигателя с последовательным возбуждением.
2) магнитного потока двигателя путем регулирования тока возбуждения двигателя /в.д.
Пуск в ход и получение низких частот вращения производят при максимальном токе возбуждения двигателя, но при уменьшенном токе возбуждения генератора, т. е. при пониженном напряжении. Ослабление магнитного потока двигателя (уменьшение его тока возбуждения) производят только после того, как исчерпана возможность повышения напряжения, т. е. когда установлен максимальный ток возбуждения генератора. Изменение направления вращения двигателя производят переменой полярности подводимого к якорю напряжения, для чего меняют направление тока в обмотке возбуждения генератора. Система «генератор — двигатель» выгодно отличается тем, что в ней отсутствуют силовые контакторы, реостаты и т. п. Управление легко поддается автоматизации, так как осуществляется путем регулирования сравнительно небольших токов возбуждения. Установки типа «генератор — двигатель» широко распространены в промышленности и на транспорте, в тех устройствах, где требуется регулирование частоты вращения в широких пределах. В транспортных установках генератор приводится во вращение дизелем, в промышленности — трехфазным синхронным или асинхронным двигателем. Систему «генератор — двигатель» широко применяют в металлургической промышленности для привода прокатных станов с двигателями мощностью 10 МВт и более при диапазоне регулирования частоты вращения 1 : 200 и точности поддержания заданной частоты вращения (погрешности) менее 1%. В рассматриваемой системе уменьшение частоты вращения производят с использованием рекуперативного торможения: сначала увеличивая ток возбуждения двигателя, а затем постепенно уменьшая ток возбуждения генератора, можно перевести двигатель в генераторный режим и быстро затормозить механизм. При этом накопленная кинетическая энергия якоря и механизма отдается в электрическую сеть. Если нагрузка толчкообразная, то иногда на валу первичного двигателя, вращающего генератор, ставят маховик, который уменьшает перегрузки первичного двигателя. Недостатки системы «генератор — двигатель» — большие масса, габариты, высокая стоимость установки; сравнительно низкий КПД (примерно 0,6 ...0,7), так как производится трехкратное преобразование энергии.

рис. 7.29. Схема «генератор—двигатель»
В последнее время на транспорте (в тепловозах, больших автомобилях, кораблях) вместо генератора постоянного тока в системе «генератор — двигатель» применяют синхронный генератор с полупроводниковым выпрямителем. Это позволяет снизить массу и уменьшить стоимость генератора. В промышленных установках такое усовершенствование обычно не применяется, так как для рекуперативного торможения требуется управляемый выпрямитель-инвертор, в связи с чем выгоднее перейти к схеме «управляемый выпрямитель — двигатель», исключив генератор и первичный двигатель.
Регулирование по системе «управляемый выпрямитель — двигатель». Развитие полупроводниковой техники позволило применить для регулирования частоты вращения двигателя управляемый выпрямитель, выполненный на тиристорах, где одновременно с выпрямлением производится регулирование выпрямленного напряжения (рис. 7.30). Применение системы «управляемый выпрямитель — двигатель» позволяет увеличить КПД и уменьшить массу установки. Если требуется быстрая остановка механизма с последующим реверсированием, то для рекуперативного торможения параллельно с выпрямителем ставят инвертор, т. е. еще один полупроводниковый преобразователь, позволяющий отдавать энергию от машины постоянного тока в сеть переменного тока. Недостаток системы «управляемый выпрямитель — двигатель» — низкий коэффициент мощности при пониженном выходном напряжении. Кроме того, из-за пульсаций напряжения возникают пульсации тока, что ухудшает работу двигателя: возрастают потери, ухудшается коммутация и т. д. Особенно велики пульсации тока при питании от сети однофазного тока (в электровозах переменного тока), где обеспечение удовлетворительной коммутации — серьезная проблема.
Тиристорно-импульсное регулирование. При управлении тяговыми двигателями возникает необходимость регулировать возбуждение тягового двигателя, как правило, в трех случаях:
1) в начальной стадии пуска для получения более плавного нарастания силы тяги. Для этого в момент подключения двигателей к источнику питания осуществляют максимальное или частичное ослабление возбуждения с последующим его усилением до полного возбуждения;
2) в заключительной стадии пуска для увеличения скорости движения подвижного состава. С этой целью после достижения полного напряжения на двигателях постепенно ослабляют магнитное поле (уменьшают ток возбуждения) до предельного или промежуточного значения коэффициента регулирования возбуждения а = Iв/Iя;
3) в начальной стадии электрического торможения (как рекуперативного, так и реостатного) с целью ограничения напряжения на двигателях при высоких скоростях движения, а также для более плавного нарастания тормозной силы. Для этого вначале торможение осуществляется при ослабленном возбуждении с последующим постепенным усилением его до полного (а=1).
Все указанные режимы регулирования возбуждения двигателей могут с успехом осуществляться при тиристорно-импульсном управлении. В метровагонах типа
81-717.5М/714.5М используется именно эта система. Если регулирование тока возбуждения (а следовательно и магнитного поля) двигателей при разгоне осуществляется ступенчато за счёт реостатов, то в режиме реостатного торможения регулирование уже плавное, что позволяет поддерживать максимально возможную тормозную силу до 55-60 км/ч. Это достигается за счёт применения тиристорного регулятора РТ-300/300А. Этот регулятор состоит из силового блока, блока управления и датчика тока двигателей. Силовой блок состоит из двух идентичных тиристорных ключей-фаз, каждая из которых обслуживает отдельную группу тяговых двигателей. Тиристорные ключи, помимо самих тиристоров, состоят из коммутирующих диодов, дросселей, конденсаторов и резисторов. Оба тиристорных ключа размещены в одном модуле, что располагается под вагоном. В этом же модуле размещён блок защиты, который в аварийных ситуациях отключает тиристорный регулятор, при этом на данном вагоне электрическое (реостатное) торможение не работает, остаётся только пневматическое.
Схема включения ТИР при регулировании возбуждения тягового двигателя (а) и осциллограммы (б)
