

курсовая работа / 21 вар КУРСОВОЙ ПРОЕКТ / Сам курсач
.doc1 Исходная схема САУ и её описание
Качество обработки шлифованием
в большой степени определяется степенью
соответствия реальных параметров
процесса оптимальным. По причине износа
и правок шлифовального круга его диаметр
изменяется, что вызывает изменение
скорости резания и нарушение оптимальных
условий обработки. Для стабилизации
скорости резания на оптимальном уровне
независимо от величины износа шлифовального
круга и предназначена  данная
САУ.
данная
САУ.
Шлифовальный круг 1 установлен на шпинделе инструментальной бабки 2, имеющей устройство правки с правящим инструментом 3. Суппорт 4 правящего устройства связан с потенциометром 5, выполняющий функции преобразователя перемещения. Двигатель 6 главного движения является регулируемым двигателем постоянного тока и имеет тахогенератор7. Тиристорный преобразователь 8 предназначен для питания двигателя 6. В САУ входят также сравнивающее устройство 9, суммирующее устройство 10 и усилитель 11.
При работе САУ на вход суммирующего устройства 10 подается задающий сигнал в виде напряжения Uо. С потенциометра 5 поступает на другой вход устройства 10 сигнал U, пропорциональный величине износа шлифовального круга 1. Суммарный сигнал через усилитель 11 подается на вход этого устройства, поступает сигал обратной связи тахогенератора 7, а напряжение ошибки поступает на вход тиристорного преобразователя 8 питания двигателя 6.
Во время правки круга 1
увеличивается напряжение
![]() ,
увеличивается ошибка, вырабатываемая
сравнивающим устройством 9. В результате
усиливается напряжение тиристорного
преобразователя 8 и повышается угловая
скорость двигателя 6 так, чтобы скорость
резания соответствовала заданной. При
повышении скорости двигателя увеличивается
напряжение на выходе тахогенератора 7
и ошибка САУ уменьшится до порога
чувствительности. Угловая скорость
шлифовального круга стабилизируется
на новом уровне и, таким образом, скорость
резания остается постоянной.
,
увеличивается ошибка, вырабатываемая
сравнивающим устройством 9. В результате
усиливается напряжение тиристорного
преобразователя 8 и повышается угловая
скорость двигателя 6 так, чтобы скорость
резания соответствовала заданной. При
повышении скорости двигателя увеличивается
напряжение на выходе тахогенератора 7
и ошибка САУ уменьшится до порога
чувствительности. Угловая скорость
шлифовального круга стабилизируется
на новом уровне и, таким образом, скорость
резания остается постоянной.
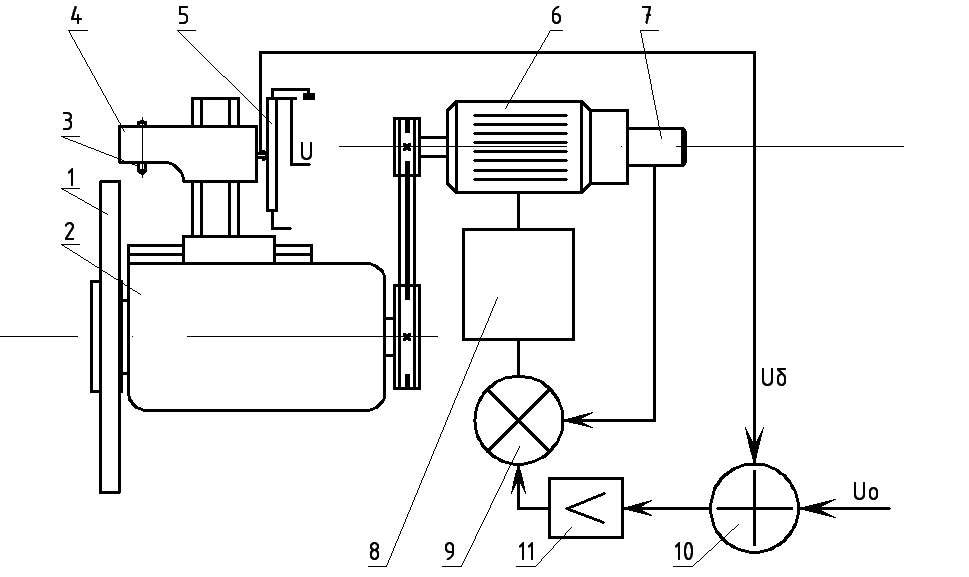
 1.
Шлифовальный круг
1.
Шлифовальный круг
2. Бабка
3. Правящий инструмент
4. Суппорт правящего устройства
5. Потенциометр
6. Двигатель
7. Тахогенератор
8. Тиристорный преобразователь
9. Сравнивающее устройство
10. Сумматор
11. Усилитель
Начальные условия:
Вариант №7
|
№ |
Параметры элементов САУ |
||||||||
|
Тэу |
Кэу |
ТТП |
Кгц |
Тя |
Тм |
КД |
КТГ |
Кп Ктп |
|
|
С |
- |
С |
- |
С |
С |
1/СВ |
ВС |
В/мм - |
|
|
7
|
0,03
|
360
|
0,18
|
30
|
0,05
|
0,18
|
4,4
|
0,18
|
50 25
|

2 Функциональная схема САУ
 Соединяя
элементы САУ между
собой в соответствии с их функциональным
назначением и схемой САУ,
окончательно получаем ее функциональную
схему:
Соединяя
элементы САУ между
собой в соответствии с их функциональным
назначением и схемой САУ,
окончательно получаем ее функциональную
схему:

ЭУ – Электронный усилитель
ТП – Тиристорный преобразователь
Д – Двигатель
ТГ – Тахогенератор
ГЦ – Гидроцилиндр
П – Потенциометр
3 Составление структурной схемы САУ
3.1 Определение передаточных функций элементов
Для составления структурной схемы найдём передаточные функции элементов.
1 Электронный усилитель
![]()
где:
ТЭУ – постоянная времени электронного усилителя;
UВЫХ – выходное напряжение – выходная величина;
UВХ – входное напряжение – входная величина;
КЭУ – коэффициент усиления.
Делаем замену
![]() Получаем:
Получаем:

откуда передаточная функция
![]()
соответствует апериодическому звену первого порядка.
2 Тиристорный усилитель-преобразователь
![]()
где:
ТТП – постоянная выхода тиристорного преобразователя;
UВЫХ – выходное напряжение – выходная величина;
UВХ – входное напряжение – входная величина;
КТП – коэффициент передачи (усилителя).
Делаем замену
![]() Получаем:
Получаем:
откуда передаточная функция
![]()
соответствует апериодическому звену первого порядка.
3 Электродвигатель постоянного тока
![]()
где:
ТЯ – электромагнитная постоянная времени якоря;
ТМ – электромеханическая постоянная двигателя;
w – угловая скорость – выходная величина;
Kg=1/Ck , Ck – коэффициент пропорциональности между обратной ЭДС и угловой скоростью;
Ug – напряжение якоря – входная величина.
Делаем замену
![]() Получаем:
Получаем:
откуда передаточная функция
![]()

соответствует апериодическому звену второго порядка.
4 Тахогенератор
![]()
где:
UВЫХ – выходное напряжение тахогенератора – выходная величина;
КТГ – коэффициент передачи;
![]() - угловая скорость входного вала –
входная величина.
- угловая скорость входного вала –
входная величина.
Делаем замену
![]() Получаем:
Получаем:
откуда передаточная функция
![]()
соответствует безынерционому звену (усилительное).
-
 Гидроцилиндр
(без учета массы)
Гидроцилиндр
(без учета массы)
![]() ,
где
,
где
Y – Выходное перемещение штока гидроцилиндра;
КГЦ – коэффициент передачи;
Q – Расход рабочей жидкости.
при
![]() имеем передаточную функцию
имеем передаточную функцию
![]() .
.
Которая соответствует безынерционому звену (усилительное).
-
Преобразователь тока
![]() ,
где
,
где
Uвых – выходное напряжение преобразователя;
Кп – коэффициент передачи;
Jвх – входной ток.
Преобразователь тока имеет
передаточную функцию
![]()
Которая соответствует безынерционому звену (усилительное).
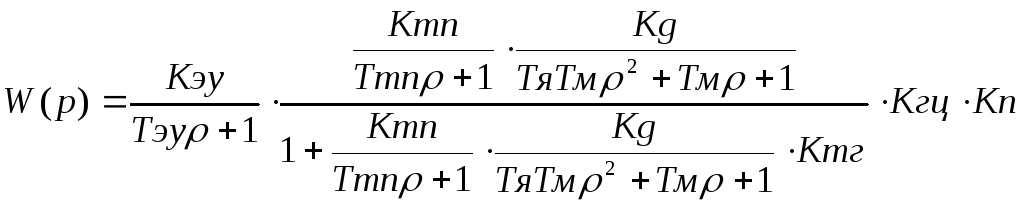
3.2 Структурная схема САУ
Составим структурную схему по найденным передаточным функциям.
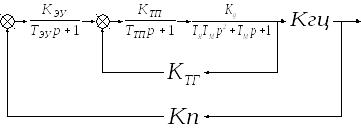

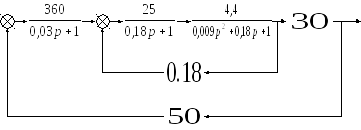
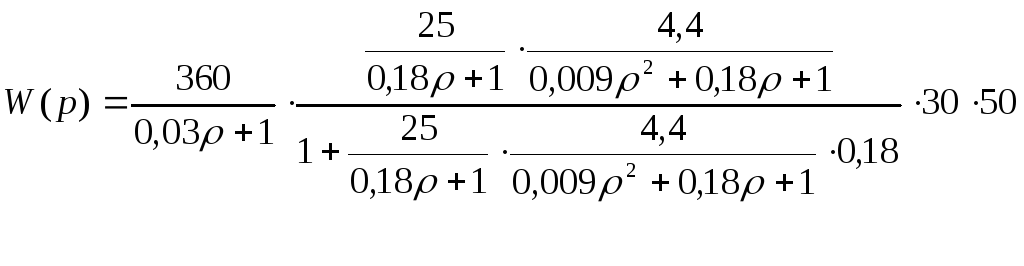
 Подставляя
численные данные, получим:
Подставляя
численные данные, получим:

4 Определение ПФ разомкнутой САУ
Для определения устойчивости системы найдем передаточную функцию разомкнутой САУ.
Для этого подставим исходные данные параметров элементов САУ, получим:
Общая передаточная функция:
 Выполнив
алгебраические преобразования, получим:
Выполнив
алгебраические преобразования, получим:
![]()
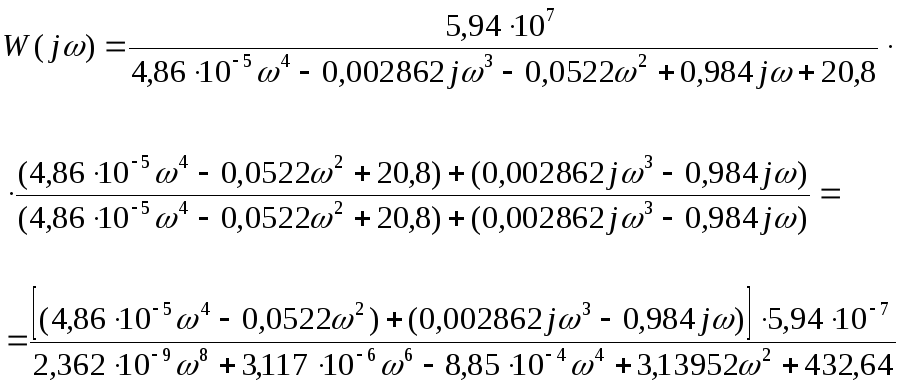
Для расчёта амплитудно-фазовой частотной характеристики (АФЧХ) выполним следующие замены:
![]()
Подставим данную замену в общую передаточную функцию.
Получим:
![]()
Умножим получившееся выражение на сопряжённую величину в знаменатели.
Получим:
Для построения АФЧХ будем задавать частоты от 0 до ¥. Для этого составим таблицу расчётов. Расчёты произведём с помощью Microsoft Excel.
По найденным данным построим АФЧХ. График изображён на рисунке 1 в Приложении.
На анализе построенного графика АФЧХ разомкнутой системы следует, что данная САУ является устойчивой, так как график не охватывает точку с координатами (-1;0).
Для построения переходной функции определим передаточную функцию замкнутой САУ
 5
Определение ПФ замкнутой САУ
5
Определение ПФ замкнутой САУ
Передаточная функция замкнутой САУ имеет вид:

Выполнив алгебраические преобразования, получим:

Выполним следующие замены:
![]()
Подставим данную замену,получим:

Умножим получившееся выражение на сопряжённую величину в знаменатели.
Получим:

Для построения переходной
характеристики замкнутой САУ методом
вещественных частотных трапецеидальных
необходимо построить график вещественной
части передаточной функции замкнутой
системы в функции от частоты при изменении
последней от 0
до
![]() .
.
На рисунке 2 в Приложении, представлен график вещественной части частотной передаточной функции замкнутой системы и функции от частоты.
-
Построение вещественных трапеции
Полученную линию заменим прямыми и составим из них трапеции таким образом, чтобы при сложении ординат получился исходный график.
Каждая функция характеризуется
высотой Н, частотой излома
![]() и частотой среза
и частотой среза
![]() .
Кроме того, трапеция имеет определенный
коэффициент наклона
.
Кроме того, трапеция имеет определенный
коэффициент наклона
![]() .
График изображен в Приложении (рисунок
3).
.
График изображен в Приложении (рисунок
3).
-
Построение графиков h – функции, соответствующих трапециям и нахождение графика искомой переходной характеристики
По коэффициенту наклона
трапеции для нее может быть найдена h –
функция, т.е. функция времени. При
построении h – функций, соответствующих
трапециям, ординаты табличных значений
следует умножить на высоту соответствующей
трапеции (т.к h – функции рассчитаны для
единичных трапеций) и изменить масштаб
времени в соответствии с формулой
![]() .
График искомой переходной характеристики
изображен в Приложении (рисунок 4).
.
График искомой переходной характеристики
изображен в Приложении (рисунок 4).
Вывод: Анализ
построенной кривой переходного процесса
показывает, что САУ стабилизируется на
уровне
![]() при подаче на вход единичного ступенчатого
сигнала. Перерегулирование достигает
0,001702.
Время переходного процесса составляет
около 0,22 с. Число
колебаний – три. Затухание за период
определяется по формуле
при подаче на вход единичного ступенчатого
сигнала. Перерегулирование достигает
0,001702.
Время переходного процесса составляет
около 0,22 с. Число
колебаний – три. Затухание за период
определяется по формуле
з = [(С1-С2)/С1]100%,
где С1 и С2 соответственно перерегулирование в первом и втором колебании. В данном случае з = 4%.
Известно, что для САУ, используемых на шлифовальном станке затухание за период должно быть не менее 90%. По полученным характеристикам можно сделать вывод о непригодности данной САУ к качественной работе. Для повышения качества и уменьшения колебательности следует увеличить постоянную времени любого звена. Более радикальное улучшение качества без ухудшения чувствительности системы может быть получено за счёт введения корректирующих устройств, меняющих структурную схему САУ.