

курсовая работа / kak_delat_nelinei_ku / Кур
.docxБалаковский Институт Техники Технологии и Управления
Инженерно-строительный факультет
Кафедра Управлния и Информатики в Технических Ситстемах
Курсовая работа
По дисциплине: ТАУ
Тема: Исследование качества системы управления
Выполнил:
Студент гр. УИТ-43
Фунбаю О.С.
Проверил
«___» _____________2009г.
Балаково-2009г.
Задание
1. Линейная система
1.1. Упростить систему
1.2 Посчитать устойчивость
1.3. Построить переходный процесс
1.4. Построить АЧХ
1.5. Построить ЛАЧХ и ЛФЧХ
2. Нелинейная система
2.1 Построить фазовый портрет
3. Дискретная система
3.1. Z–преобразование
3.2. ω–преобразование
3.3. λ–преобразование
3.4. Проверить систему на устойчивость
3.5. Построить переходный процесс
3.6. Построить ЛАЧХ и ЛФЧХ
Исходные данные

Рисунок 1. Функциональная схема САР частоты вращения вала двигателя постоянного тока
Усил - усилитель;
ТП - тиристорный преобразователь;
Генер - генератор;
ДПТ - двигатель постоянного тока;
ТГен - тахогенератор;
ОбрСН - гибкая обратная связь по напряжению.
ДПТ – двигатель постоянного тока независимого возбуждения.
ДПТ – объект управления, его выходная величина, частота вращения вала n должна соответствовать заданию.
uз - напряжение задания, в соответствии с которым должна изменяться частота n вращения вала ДПТ.
МС - возмущающий момент силы, приложенный к валу ДПТ от той машины, которую он приводит в действие
Усилитель
моделируется апериодическим звеном с
передаточной функцией:
 (1)
(1)
с параметрами: ky = 43 ; Ty = 0,083, с.
Тиристорный преобразователь моделируется апериодическим звеном с передаточной функцией:
с параметрами: kтп = 61 ; Tтп =0,073, с.
Гибкая обратная связь по напряжению, инерционно-дифференцирующее звено:
где: kосн = 0,38; Tосн= 0,28, c.
ТГ - тахогенератор, усилительное (пропорциональное) звено:

где: kтг = 0,089, [В•сек/об].
Генератор, апериодическое звено:
где: kг = 1,53 ; Tг = 0,31, с.
ДПТ- двигатель постоянного тока, колебательное звено. Его передаточная функция по каналу управления:
а по каналу возмущения:

где кду = 3,5, [об/(сек•В)];
кдв = 1,9, [об/(сек•Н•м)];
Tя = 0,1336, с;
Tм = 1,65, с.
ВВЕДЕНИЕ
Автоматическое регулирование представляет собой наиболее эффективный принцип автоматики при частичной автоматизации, когда технические средства автоматики осуществляют лишь простые
Современные системы управления сложными объектами промышленной технологии строятся по иерархическому принципу. Это значит, что система управления такими объектами расчленяется на ряд систем, стоящих на разных уровнях подчинения. Система более высокого ранга, ориентируясь на общий (глобальный) критерий управления, выдает функции управления, связанные с измерением, анализом, контролем различных физических величин и отработкой решений, принятых оператором в виде установок, программ или других сигналов управления. команды на включение или отключение отдельных локальных объектов, а также осуществляет выбор частных критериев управления этими объектами. Локальные системы управления осуществляют поддержание заданных оптимальных режимов, как в пусковых, так и в нормальных эксплуатационных условиях. Являясь нижним иерархическим уровнем автоматических систем управления промышленными объектами, локальные системы осуществляют функции измерения, контроля и регулирования основных технологических параметров, характеризующих состояние технологического процесса. Количество регулируемых параметров в отдельно взятой локальной системе управления невелико и составляет один или два параметра. Из общего числа систем управления современным производством локальные системы составляют около 80%. Качество работы локальных систем управления во многом определяет стабильность и качество выходного продукта, а, следовательно, и рентабельность производства.
1. Расчет линейной системы.
1.1. Упрощение системы.
Представим исходную схему системы в виде:

Рисунок 2. Структурная схема системы
По правилу преобразования структурных схем получим передаточную функцию системы


Рисунок 3. Вид структурной схемы


Рисунок 4. Структурная схема системы после преобразований
Общая
передаточная функция системы будет
иметь вид:

С помощью программного пакета Mathcad подставим заданные значения передаточных функций и посчитаем общую передаточную функцию:
![]()
![]()
![]()
![]()
![]()
![]()
![]()

После подстановки и преобразований передаточная функция системы примет
следующий
вид:

1.2. Проверка системы на устойчивость.
1.2.1. По теореме устойчивости Ляпунова. Для того, чтобы автоматическая система, описываемая линейными уравнениями с постоянными коэффициентами, была устойчивой необходимо и достаточно, чтобы вещественные корни дифференциального были отрицательными, а комплексные корни имели отрицательную часть.
Найдем корни характеристического уравнения с помощью Mathcad

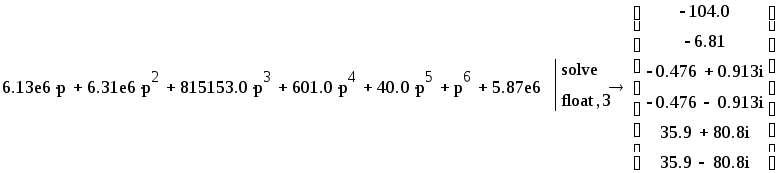
Так как характеристическое уравнение системы имеет корни с отрицательными и положительными вещественными частями, то, приходим к выводу, что данная система не устойчива.
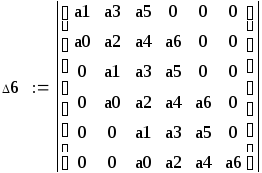
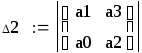
1.2.2. По критерию устойчивости Гурвица.
Для устойчивости системы необходимо и достаточно, чтобы все диагональные миноры главного определителя, составленного по коэффициентам характеристического уравнения, были больше нуля. Расчеты произведем в Mathcad:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Исходя из полученных результатов, приходим к выводу, что система не устойчива.
1.3. Построение переходного процесса.
Построим график переходного процесса системы с помощью Mathcad.


h(t):=


![]()

Рисунок 5. График переходного процесса системы
По графику видно, что система является неустойчивой, поэтому определять прямые оценки качества системы невозможно.
1.4. Построение АЧХ и ФЧХ
Запишем передаточную функцию системы:

Заменим в передаточной функции p на jω. После подстановки передаточная функция примет следующий вид:

Запишем формулу для расчета АЧХ в Mathcad.
Строим амплитудно–частотную характеристику разомкнутой системы с помощью Mathcad.
![]()
![]()
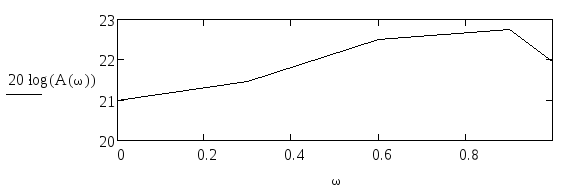
Рисунок 6. Амплитудно–частотная характеристика.
По графику амплитудно–частотной характеристики видно, что система неустойчива.
Найдем ФЧХ системы по формуле:

![]()
Построим график ФЧХ:

-
1.5 Построение ЛАЧХ и ЛФЧХ.
Запишем
передаточную функцию системы.

Заменим в передаточной функции p на jω. После подстановки передаточная
функция примет следующий вид:

Разобьем передаточную функцию на:
– вещественную часть
![]()
![]()
– мнимую часть
![]()
![]()
Строим ЛАЧХ и ЛФЧХ:
![]()
![]()
-
Исследование НЕлинейной части системы
2.1 Техническое задание
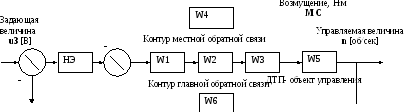
Рисунок 9 – Структурная схема системы с нелинейным элементом
График, описывающий нелинейный элемент НЭ приведен на рисунке 9.
Отрезок
(-4, 4) называется шириной петли гистерезиса,
в ряде случаев ширина петли должна быть
большой и это является полезным для
системы, а в ряде случаев петля гистерезиса
приводит к нежелательным последствиям,
поэтому ее стремятся уменьшить.
Приведенной характеристикой обладают
электромагнитные реле и электромагниты.
Обычно для электромагнитного реле
величина «4» называется порогом
срабатывания, а величина «-4» - порогом
отпускания.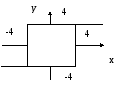

Рисунок 10 – Релейная статическая характеристика с гистерезисом
2.2 Упрощение нелинейной системы.
По правилам преобразования структурных схем преобразуем нелинейную систему.

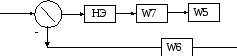
Рисунок 11. Вид структурной схемы
Разорвем обратную связь и получим:

Рисунок 12. Вид структурной схемы


Рисунок 13. Вид структурной схемы
Введем вынужденную обратную связь

Рисунок 14. Структурная схема системы после преобразований

Передаточная функция есть или , (8)
где -передаточная функция линейной системы;
Подставляя в эту формулу значение передаточной функции получим:

Приведенную формулу можно записать в виде:


Воспользуемся пакетом MathCad для решения этого дифференциального уравнения.
Введем замену и исключим из правой части уравнения производную:

Для того чтобы построить фазовый портрет, необходимо, чтобы степень числителя и знаменателя не превышала вторую степень, поэтому элементы выше второй степени исключаем. Тогда получим:


Так как в качестве нелинейного элемента используется реле с гистерезисом со статической характеристикой, представленной на рисунке 9, то подставляя значение для двух участков, получим систему:


Создадим матрицу для решения дифференциального уравнения.
В данной матрице реализовано условие перехода от одного уравнения к другому. Зададим матрицы для трех начальных условий:
Возьмем количество точек равным 5000 и конечное время интегрирования 200, матрица решений запишется в виде:
![]()
![]()
Построим фазовый портрет:

Рисунок 15. Фазовый портрет системы

Рисунок 18 – Переходный процесс системы
