

3.4. Структурные схемы дискретных систем
Особенность составления и преобразования
структурных схем непрерывно-дискретных
систем.Структурные схемы дискретных
систем представляются соединением
дискретных звеньев, для каждого из
которых определена![]() –передаточная
функция. Особенность составления
структурных схем непрерывно-дискретных
систем как раз и проявляется в разбиении
системы на дискретные звенья и связана
с наличием в системе импульсных
и квантующих элементов. При этом
в системе управления с БЦВМ в контуре
роль импульсных элементов выполняют
ЦАП, а квантующими элементами являются
АЦП.
–передаточная
функция. Особенность составления
структурных схем непрерывно-дискретных
систем как раз и проявляется в разбиении
системы на дискретные звенья и связана
с наличием в системе импульсных
и квантующих элементов. При этом
в системе управления с БЦВМ в контуре
роль импульсных элементов выполняют
ЦАП, а квантующими элементами являются
АЦП.
Рис.
3.3.
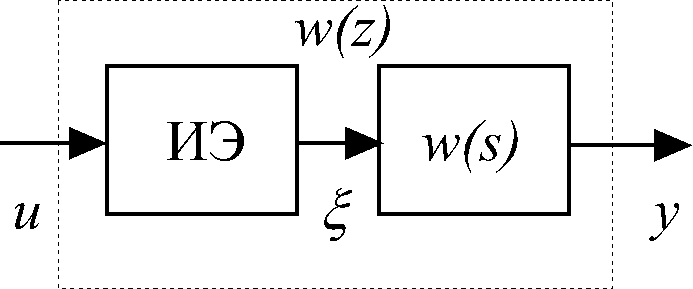
![]() (ЦАП является экстраполятором нулевого
порядка), то
(ЦАП является экстраполятором нулевого
порядка), то
![]() –передаточная
функция данного дискретного звена может
быть определена по передаточной функции
непрерывной части
–передаточная
функция данного дискретного звена может
быть определена по передаточной функции
непрерывной части![]() по формуле (3.3.14).
по формуле (3.3.14).
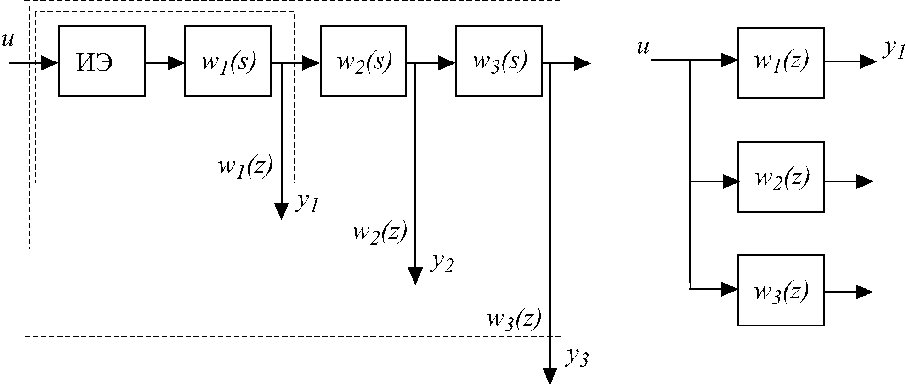
Если система содержит несколько
импульсных элементов и непрерывная
часть, соответствующая какому-либо
импульсному элементу имеет квантуемый
выход (например, с помощью последующих
импульсных элементов), то данная система
может быть представлена соединением
соответствующего числа дискретных
звеньев. При этом если непрерывная
часть, соответствующая какому-либо
импульсному элементу, имеет несколько
квантуемых выходов (рис.3.4, а), то эта
часть системы также представится
несколькими дискретными звеньями по
числу квантуемых выходов (рис.3.4, б).
Причём,
![]() –передаточные
функции дискретных звеньев будут
определяться парами – импульсный
элемент
+
непрерывная часть по соответствующему
выходу.
–передаточные
функции дискретных звеньев будут
определяться парами – импульсный
элемент
+
непрерывная часть по соответствующему
выходу.
а)б)
Рис.
3.4.
![]() ,
то соответствующее дискретное звено
нельзя представить последовательным
соединением дискретных звеньев,
являющихся результатом дискретизации
отдельных непрерывных звеньев
,
то соответствующее дискретное звено
нельзя представить последовательным
соединением дискретных звеньев,
являющихся результатом дискретизации
отдельных непрерывных звеньев![]() ,
то есть
,
то есть![]() ,
где
,
где![]() –результат
формального применения формулы (3.3.14) к
передаточной функции
–результат
формального применения формулы (3.3.14) к
передаточной функции![]() .
.
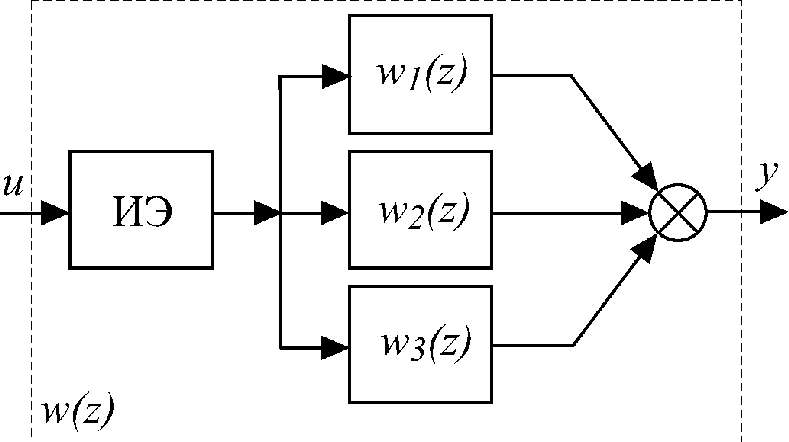
С другой стороны, если непрерывная
часть, соответствующая какому-либо
импульсному элементу представляется
параллельным соединением звеньев с
общим импульсным элементом на входе
(рис.3.5), то для нахождения общей
![]() –передаточной
функции соответствующего дискретного
звена можно использовать свойство
параллельного соединения. Другими
словами, если для непрерывной части
имеет место
–передаточной
функции соответствующего дискретного
звена можно использовать свойство
параллельного соединения. Другими
словами, если для непрерывной части
имеет место![]() ,
то для соответствующего дискретного
звена
,
то для соответствующего дискретного
звена![]() ,
где
,
где![]() –могут
быть получены по передаточным функциям
–могут
быть получены по передаточным функциям![]() .
.
Рис. 3.5.
![]() –передаточная
функция, вступают в силу обычные правила
преобразования структурных схем, такие
же, как и для непрерывных систем. Так,
для последовательного(рис.3.6,
а)и параллельного (рис.3.6, б) соединения
дискретных звеньев с передаточными
функциями
–передаточная
функция, вступают в силу обычные правила
преобразования структурных схем, такие
же, как и для непрерывных систем. Так,
для последовательного(рис.3.6,
а)и параллельного (рис.3.6, б) соединения
дискретных звеньев с передаточными
функциями![]() можно соответственно записать
можно соответственно записать
![]() ,
,![]() .
.
Для соединения звеньев с обратной связью (рис.3.6, в) имеет место
![]() ,
,
где "+" для отрицательной обратной связи и "–" для положительной.
Рис. 3.6.

Рис. 3.7.

![]() .
В качестве измерителей используются:
сельсинная пара (СД-СП) – для измерения
рассогласования
.
В качестве измерителей используются:
сельсинная пара (СД-СП) – для измерения
рассогласования![]() ,
и тахогенератор (ТГ) – для измерения
скорости вращения вала двигателя
,
и тахогенератор (ТГ) – для измерения
скорости вращения вала двигателя![]() .
.
Алгоритм управления этой системой
реализуется в БЦВМ, связанной с объектом
управления и с измерительными устройствами
через ЦАП и АЦП. В БЦВМ поступает
оцифрованная информация о сигналах
![]() и
и![]() .
При этом сигнал
.
При этом сигнал![]() пропорционален рассогласованию
пропорционален рассогласованию![]() и формируется с помощью фазочувствительного
усилителя-выпрямителя (ФЧУВ). Сигнал
и формируется с помощью фазочувствительного
усилителя-выпрямителя (ФЧУВ). Сигнал![]() пропорционален скорости вращения
пропорционален скорости вращения![]() и снимается непосредственно с
тахогенератора.
и снимается непосредственно с
тахогенератора.
Рис. 3.8.

 (3.4.1)
(3.4.1)
где
![]() –электромеханическая
постоянная времени двигателя;
–электромеханическая
постоянная времени двигателя;![]() –статические
коэффициенты передачи объекта по
управлению и внешнему возмущению
соответственно, причём
–статические
коэффициенты передачи объекта по
управлению и внешнему возмущению
соответственно, причём![]() включает в себя коэффициент передачи
УМ;
включает в себя коэффициент передачи
УМ;![]() –коэффициент
передачи редуктора.
–коэффициент
передачи редуктора.
Для измерительных устройств будем иметь
![]() (3.4.2)
(3.4.2)
где
![]() –коэффициенты
передачи измерителей, причём
–коэффициенты
передачи измерителей, причём![]() включает коэффициент передачи ФЧУВ.
включает коэффициент передачи ФЧУВ.
Не раскрывая пока содержания реализуемого в БЦВМ закона управления приведём структурную схему данной системы с использованием передаточных функций непрерывных элементов. Для этого перейдём в (3.4.1) и (3.4.2) к преобразованиям по Лапласу и запишем изображения выходных переменных объекта и измерительных устройств
 (3.4.3)
(3.4.3)
где
![]() –изображение
по Лапласу вспомогательной переменной
–изображение
по Лапласу вспомогательной переменной![]() ,
определяемой соотношением
,
определяемой соотношением
![]() . (3.4.4)
. (3.4.4)
По уравнениям (3.4.3), (3.4.4) нетрудно составить структурную схему, которая представлена на рис.3.9.
Рис. 3.9.

![]() –передаточных
функций. Для этого систему надо разбить
на эквивалентные дискретные звенья и
определить для них
–передаточных
функций. Для этого систему надо разбить
на эквивалентные дискретные звенья и
определить для них![]() –передаточные
функции. При этом, в соответствии с
результатами раздела 3.3, возможны
два подхода к решению данной задачи.
Один из них связан с нахождением
дискретной модели непрерывной части в
виде разностных уравнений. Далее эти
разностные уравнения записываются в
Z–изображениях
и определяются
–передаточные
функции. При этом, в соответствии с
результатами раздела 3.3, возможны
два подхода к решению данной задачи.
Один из них связан с нахождением
дискретной модели непрерывной части в
виде разностных уравнений. Далее эти
разностные уравнения записываются в
Z–изображениях
и определяются![]() –передаточные
функции эквивалентных дискретных
звеньев. В данном подходе учёт особенностей
разбиения системы на такие звенья
заложен в самом методе решения задачи,
и в этом смысле является более
универсальным. Другой метод связан с
определением
–передаточные
функции эквивалентных дискретных
звеньев. В данном подходе учёт особенностей
разбиения системы на такие звенья
заложен в самом методе решения задачи,
и в этом смысле является более
универсальным. Другой метод связан с
определением![]() –передаточных
функций эквивалентных дискретных
звеньев непосредственно по передаточным
функциям непрерывных элементов. При
использовании этого подхода необходимо
учитывать все особенности, связанные
с наличием в системе импульсных (ЦАП) и
квантующих (АЦП) элементов.
–передаточных
функций эквивалентных дискретных
звеньев непосредственно по передаточным
функциям непрерывных элементов. При
использовании этого подхода необходимо
учитывать все особенности, связанные
с наличием в системе импульсных (ЦАП) и
квантующих (АЦП) элементов.
Рассмотрим оба подхода. При этом будем
считать, что ЦАП и АЦП работают синхронно
с периодом дискретности
![]() и ЦАП является экстраполятором нулевого
порядка. Пусть также выдача управления
производится с задержкой на один такт
дискретности по отношению к моментам
съёма информации, а момент сопротивления
и ЦАП является экстраполятором нулевого
порядка. Пусть также выдача управления
производится с задержкой на один такт
дискретности по отношению к моментам
съёма информации, а момент сопротивления![]() является медленно изменяющейся функцией,
так что в пределах каждого такта
дискретности можно принять
является медленно изменяющейся функцией,
так что в пределах каждого такта
дискретности можно принять![]() .
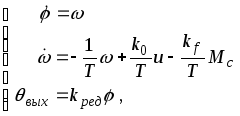
Тогда, если учесть, что с введением
вспомогательной переменной (3.4.4) уравнения
непрерывного объекта (3.4.1) формально
представляются в виде (3.3.18) (пример из
предыдущего раздела), то дискретную
модель непрерывной части системы можно
представить следующими разностными
уравнениями
.
Тогда, если учесть, что с введением
вспомогательной переменной (3.4.4) уравнения
непрерывного объекта (3.4.1) формально
представляются в виде (3.3.18) (пример из
предыдущего раздела), то дискретную
модель непрерывной части системы можно
представить следующими разностными
уравнениями
 (3.4.5)
(3.4.5)
где параметры
![]() определяются из формул (3.3.19) при
определяются из формул (3.3.19) при![]() и имеют вид
и имеют вид
![]() .
.
Отметим, что в последнем уравнении системы (3.4.5) учтено запаздывание по управлению на один такт.
Переходя в уравнениях (3.4.5) к Z–изображениям, запишем изображения выходных переменных объекта и измерителей. После несложных преобразований будем иметь
 (3.4.6)
(3.4.6)
где
![]() .
Первые два соотношения в этих уравнениях
содержат
.
Первые два соотношения в этих уравнениях
содержат![]() –передаточные
функции эквивалентных дискретных
звеньев, с помощью которых теперь
представляется непрерывный объект, то
есть
–передаточные
функции эквивалентных дискретных
звеньев, с помощью которых теперь
представляется непрерывный объект, то
есть
![]() .
.
Эти же передаточные функции можно получить на основе второго подхода непосредственно по структурной схеме рис.3.9 с использованием передаточных функций непрерывных элементов. При этом
![]() .
.
Пусть алгоритм работы БЦВМ представляется в форме "вход-выход" следующим разностным уравнением
![]() ,
,
где
![]() –некоторые
числовые параметры. Переходя в этом
уравнении кZ–изображениям,
запишем выражение для выходной переменной
дискретного регулятора
–некоторые
числовые параметры. Переходя в этом
уравнении кZ–изображениям,
запишем выражение для выходной переменной
дискретного регулятора
![]() . (3.4.7)
. (3.4.7)
Рис. 3.10.

Отметим, что алгоритм управления, реализуемый в БЦВМ, который в Z–изображениях представляется соотношением (3.4.7), на структурной схеме отмечен пунктиром. Остальные элементы структурной схемы-это эквивалентные дискретные звенья, моделирующие непрерывную часть системы.
Анализ дискретных систем в частотной области
Реакция дискретной системы на гармоническое воздействие.Рассмотрим линейную дискретную систему с одним входом и одним выходом, представленную следующими разностными уравнениями
![]() (3.5.1)
(3.5.1)
где
![]() - вектор состояний,
- вектор состояний,![]() - переменные входа и выхода,
- переменные входа и выхода,![]() ,
,![]() ,
,![]() - числовые матрицы соответствующих
размеров.
- числовые матрицы соответствующих
размеров.
Определим установившуюся реакцию выхода этой системы на гармоническую решетчатую функцию, в качестве которой для определенности выберем
![]() , (3.5.2)
, (3.5.2)
где
![]() - период дискретности,
- период дискретности,![]() ,
,![]() - частота и амплитуда данного воздействия.
Отметим, что воздействие (3.5.2) обладает
тем свойством, что если вместо параметра
- частота и амплитуда данного воздействия.
Отметим, что воздействие (3.5.2) обладает
тем свойством, что если вместо параметра![]() подставить
подставить![]() ,
где
,
где![]() - любое целое, то (3.5.2) не изменится.
Действительно, с учетом периодичности
гармонической функции получим
- любое целое, то (3.5.2) не изменится.
Действительно, с учетом периодичности
гармонической функции получим
![]() .
.
Таким образом решетчатая функция (3.5.2)
является периодической не только по
аргументу
![]() (по дискретному времени), но и по аргументу
(по дискретному времени), но и по аргументу![]() с периодом
с периодом![]() .
Это означает, что при нахождении реакции
системы (3.5.1) на гармоническое воздействие
(3.5.2) частоту этого воздействия
.
Это означает, что при нахождении реакции
системы (3.5.1) на гармоническое воздействие
(3.5.2) частоту этого воздействия![]() достаточно выбирать в диапазоне
достаточно выбирать в диапазоне![]() .
Отметим, что при теоретических
исследованиях часто используют понятие
отрицательных частот. Поэтому вместо
указанного диапазона следует принять
.
Отметим, что при теоретических
исследованиях часто используют понятие
отрицательных частот. Поэтому вместо
указанного диапазона следует принять![]() ,
который очевидно охватывает все возможные
частоты гармонических решетчатых
функций.
,
который очевидно охватывает все возможные
частоты гармонических решетчатых
функций.
Используя формулу Эйлера, представим воздействие (3.5.2) в виде двух составляющих
 (3.5.3)
(3.5.3)
Тогда установившуюся реакцию
![]() выхода дискретной системы (3.5.1) также
можно искать в виде двух составляющих
выхода дискретной системы (3.5.1) также
можно искать в виде двух составляющих
![]() , (3.5.4)
, (3.5.4)
где
![]() ,
,![]() - вынужденные решения разностного
уравнения (3.5.1) относительно вектора
состояний при соответствующем воздействии
из (3.5.3). Будем искать эти вынужденные
решения в таком же виде как и сами
воздействия (3.5.3). Так для
- вынужденные решения разностного
уравнения (3.5.1) относительно вектора
состояний при соответствующем воздействии
из (3.5.3). Будем искать эти вынужденные
решения в таком же виде как и сами
воздействия (3.5.3). Так для![]() примем
примем
![]() , (3.5.5)
, (3.5.5)
где
![]() - неизвестная пока векторная функция.
Для ее нахождения подставим (3.5.5) в
исходное уравнение, в котором вместо
- неизвестная пока векторная функция.
Для ее нахождения подставим (3.5.5) в
исходное уравнение, в котором вместо![]() будем использовать
будем использовать![]() .
Получим
.
Получим
![]() .
.
Отсюда
![]() ,
,
и, таким образом, с учетом (3.5.5), первая составляющая установившейся реакции выхода определится соотношением
![]() .
.
Обозначим
![]() , (3.5.6)
, (3.5.6)
тогда последнее выражение запишется в виде
![]() . (3.5.7)
. (3.5.7)
Совершенно аналогично можно определить и вторую составляющую реакции выхода. Она будет иметь вид
![]() . (3.5.8)
. (3.5.8)
Используя понятие модуля и аргумента комплексной функции, запишем (3.5.6) в следующей форме
![]() , (3.5.9)
, (3.5.9)
где
![]() , (3.5.10)
, (3.5.10)
![]() . (3.5.11)
. (3.5.11)
Тогда для установившейся реакции выхода (3.5.4), с учетом (3.5.7), (3.5.8) будем иметь

Применяя теперь снова формулу Эйлера, окончательно получим
![]() . (3.5.12)
. (3.5.12)
Таким образом, при воздействии на
линейную дискретную систему гармонической
решетчатой функции установившаяся
реакция на ее выходе также является
гармонической решетчатой функцией той
же частоты, но с другой амплитудой и
другой фазой. При этом отношение амплитуд
выхода и входа есть функция
![]() ,
а сдвиг фаз между выходом и входом
совпадает с функцией
,
а сдвиг фаз между выходом и входом
совпадает с функцией![]() .
.
Частотные характеристики дискретных
систем.Рассмотрим комплексную функцию![]() ,
определяемую формулой (3.5.6). Она называется
частотной передаточной функцией
дискретной системы (3.5.1). Если воспользоваться
понятием
,
определяемую формулой (3.5.6). Она называется
частотной передаточной функцией
дискретной системы (3.5.1). Если воспользоваться
понятием![]() -передаточной
функции этой системы
-передаточной
функции этой системы
![]() ,
,
то нетрудно видеть, что характеристика
![]() образуется из передаточной функции
образуется из передаточной функции![]() путем формальной подстановки
путем формальной подстановки
![]() . (3.5.13)
. (3.5.13)
Представим функцию
![]() в виде
в виде
![]() .
.
Тогда при изменении частоты в интервале
![]() ,
в комплексной плоскости
,
в комплексной плоскости![]() получим некоторую кривую, которая
называется годографом амплитудно-фазо-частотной
характеристики (АФЧХ) дискретной системы.
В силу (3.5.13) эту характеристику можно
рассматривать как отображение комплексной
плоскости
получим некоторую кривую, которая
называется годографом амплитудно-фазо-частотной
характеристики (АФЧХ) дискретной системы.
В силу (3.5.13) эту характеристику можно
рассматривать как отображение комплексной
плоскости![]() в комплексную плоскость
в комплексную плоскость![]() ,
когда переменная
,
когда переменная![]() изменяется вдоль окружности единичного
радиуса
изменяется вдоль окружности единичного
радиуса![]() ,
,![]() (рис.3.1, б).
(рис.3.1, б).
Рассмотрим теперь вещественные
характеристики
![]() и
и![]() ,
определяемые формулами (3.5.10) и (3.5.11).
Характеристика
,
определяемые формулами (3.5.10) и (3.5.11).
Характеристика![]() ,
представляющая собой зависимость
отношения амплитуд гармонических
решетчатых функций выхода и входа от
частоты входного воздействия, называется
амплитудно-частотной характеристикой
(АЧХ) дискретной системы. Соответственно
характеристика
,
представляющая собой зависимость
отношения амплитуд гармонических
решетчатых функций выхода и входа от
частоты входного воздействия, называется
амплитудно-частотной характеристикой
(АЧХ) дискретной системы. Соответственно
характеристика![]() ,
отражающая зависимость сдвига фаз
гармонических решетчатых функций выхода
и входа от частоты
,
отражающая зависимость сдвига фаз
гармонических решетчатых функций выхода
и входа от частоты![]() ,
называется фазо-частотной характеристикой
(ФЧХ). При этом, как следует из (3.5.10),
(3.5.11),
,
называется фазо-частотной характеристикой
(ФЧХ). При этом, как следует из (3.5.10),
(3.5.11),![]() и
и![]() аналитически определяются как модуль
и аргумент частотной передаточной
функции.
аналитически определяются как модуль
и аргумент частотной передаточной
функции.
Отметим, что характеристики
![]() ,
,![]() и
и![]() по построению являются периодическими
функциями относительно аргумента
по построению являются периодическими
функциями относительно аргумента![]() с периодом
с периодом![]() .
Поэтому при их построении достаточно
рассматривать диапазон частот
.
Поэтому при их построении достаточно
рассматривать диапазон частот![]() .
Практически обычно ограничиваются лишь
положительным диапазоном
.
Практически обычно ограничиваются лишь
положительным диапазоном![]() ,
так как для отрицательных частот данные
характеристики ведут себя симметрично.
Это нетрудно показать, используя свойства
комплексной функции
,
так как для отрицательных частот данные
характеристики ведут себя симметрично.
Это нетрудно показать, используя свойства
комплексной функции![]() .
.
Ограниченность частотного диапазона
вызывает некоторое неудобство при
построении частотных характеристик
дискретных систем. Другим более
существенным препятствием является
довольно сложная зависимость этих
характеристик от частоты
![]() .
В связи с этим в практических задачах,
довольно часто, вместо частотных
характеристик
.
В связи с этим в практических задачах,
довольно часто, вместо частотных
характеристик![]() ,
,![]() и
и![]() используют, так называемые, псевдочастотные
характеристики. Эти характеристики
определяются с помощью билинейного
преобразования следующего вида
используют, так называемые, псевдочастотные
характеристики. Эти характеристики
определяются с помощью билинейного
преобразования следующего вида
![]() , (3.5.14)
, (3.5.14)
которое часто называют
![]() -преобразованием.
Оно отображает единичную окружность
комплексной плоскости
-преобразованием.
Оно отображает единичную окружность
комплексной плоскости![]() в мнимую ось на комплексной плоскости
в мнимую ось на комплексной плоскости![]() .
Действительно, если
.
Действительно, если![]() ,
то с использованием формулы Эйлера из
(3.5.14) получим
,
то с использованием формулы Эйлера из
(3.5.14) получим
![]() . (3.5.15)
. (3.5.15)
При этом, если частота
![]() изменяется от
изменяется от![]() до
до![]() ,
то параметр
,
то параметр![]() будет изменяться от
будет изменяться от![]() до
до![]() .
Таким образом (3.5.15) преобразует
действительную частоту
.
Таким образом (3.5.15) преобразует
действительную частоту![]() в безразмерный параметр
в безразмерный параметр![]() ,
который называется относительной
псевдочастостой.
,
который называется относительной
псевдочастостой.
Часто вместо относительной псевдочастоты
используют абсолютную псевдочастоту
![]() ,
которая связана с
,
которая связана с![]() соотношением
соотношением
![]() (3.5.16)
(3.5.16)
и имеет размерность
![]() .
Заметим, что при низких частотах, когда
.
Заметим, что при низких частотах, когда![]() ,
функцию
,
функцию![]() можно приближённо заменить его аргументом
можно приближённо заменить его аргументом![]() и тогда из (3.5.16) следует, что
и тогда из (3.5.16) следует, что![]() .
.
Учитывая сказанное, приведём процедуру
построения псевдочастнотных характеристик
для абсолютной псевдочастоты. Первым
шагом в этой процедуре является переход
к новой комплексной переменной
![]() .
Для этого из (3.5.14) выразим
.
Для этого из (3.5.14) выразим![]() и подставим в
и подставим в![]() –передаточную
функцию исследуемой дискретной системы.
В результате получим новую дробно-рациональную
функцию
–передаточную
функцию исследуемой дискретной системы.
В результате получим новую дробно-рациональную
функцию
 ,
,
в которой затем произведём замену
![]() ,
где
,
где![]() .
Полученная таким образом комплексная
функция
.
Полученная таким образом комплексная
функция![]() служит основой для построения
псевдочастотных характеристик дискретной
системы. Так, при
служит основой для построения
псевдочастотных характеристик дискретной
системы. Так, при![]() получим псевдочастотную передаточную
функцию
получим псевдочастотную передаточную
функцию![]() ,
которая в комплексной плоскости
представится годографом псевдочастотной
АФЧХ. При этом
,
которая в комплексной плоскости
представится годографом псевдочастотной
АФЧХ. При этом
![]() и
и![]()
будут представлять псевдочастотные
АЧХ и ФЧХ. На основе этих функций можно
определить также логарифмические
псевдочастотные характеристики
![]() и
и![]() ,
правила построения которых по передаточной
функции
,
правила построения которых по передаточной
функции![]() те же, что и в непрерывных системах[3].
те же, что и в непрерывных системах[3].
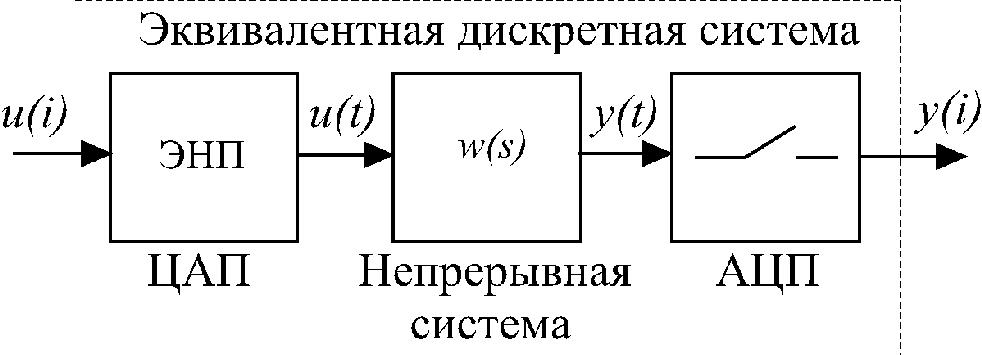
Частотные свойства непрерывно-дискретных
систем.Рассмотрим односвязную
непрерывную систему с импульсным
элементом на входе. Для определённости
будем полагать, что в роли импульсного
элемента выступает ЦАП с экстраполяцией
нулевого порядка (ЭНП), работающий с
периодом![]() ,
а выход системы квантуется с тем же
периодом с помощью АЦП (рис.3.11). Для
простоты будем считать, то сдвиг между
решётчатыми функциями
,
а выход системы квантуется с тем же
периодом с помощью АЦП (рис.3.11). Для
простоты будем считать, то сдвиг между
решётчатыми функциями![]() и
и![]() на входе и выходе эквивалентной дискретной
системы отсутствует.
на входе и выходе эквивалентной дискретной
системы отсутствует.
Рис.
3.11.
![]() и
и![]() ,
обозначающих выходы рассматриваемой
системы (рис.3.11), эта связь запишется в
виде
,
обозначающих выходы рассматриваемой
системы (рис.3.11), эта связь запишется в
виде
![]() , (3.5.17)
, (3.5.17)
где
![]() .
.
Чтобы перейти к передаточным функциям
разделим (3.5.17) на
![]() ,
которая представляет собойD–изображение
решётчатой функции входа
,
которая представляет собойD–изображение
решётчатой функции входа![]() .
Тогда получим
.
Тогда получим
 , (3.5.18)
, (3.5.18)
где
![]() обозначает передаточную функцию
эквивалентной дискретной системы,
которая, очевидно, может быть получена
из её
обозначает передаточную функцию
эквивалентной дискретной системы,
которая, очевидно, может быть получена
из её![]() ‑передаточной
функции
‑передаточной
функции![]() подстановкой
подстановкой![]() .
.
Отметим, что как показано в разделе 3.1,
D–изображение![]() можно рассматривать как обычное
преобразование Лапласа от некоторой
вспомогательной функции
можно рассматривать как обычное
преобразование Лапласа от некоторой
вспомогательной функции![]() ,
образованной последовательностью
дельта-функций, взвешенных значениями
,
образованной последовательностью
дельта-функций, взвешенных значениями![]() ,
то есть
,
то есть![]() .
Тогда (3.5.18) можно записать в виде
.
Тогда (3.5.18) можно записать в виде
![]() , (3.5.19)
, (3.5.19)
Рис.
3.12.
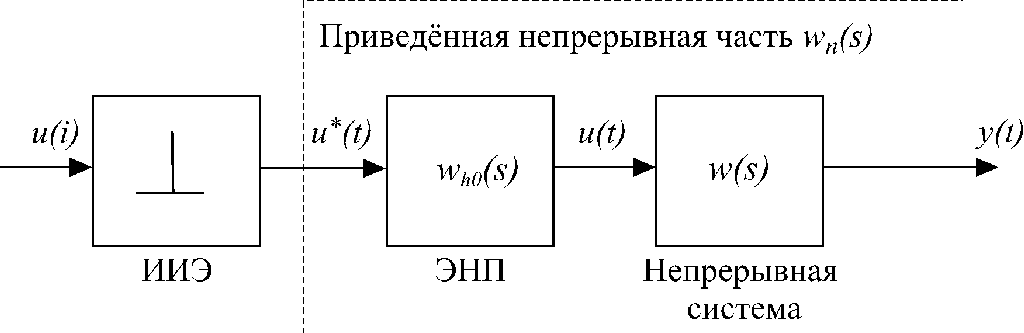
![]() обозначает передаточную функцию
некоторой приведённой непрерывной
части (рис.3.12).
Она связывает изображения по Лапласу
непрерывного выхода
обозначает передаточную функцию
некоторой приведённой непрерывной
части (рис.3.12).
Она связывает изображения по Лапласу
непрерывного выхода![]() и вспомогательной функции на входе
и вспомогательной функции на входе![]() .
Заметим, что сигнал
.
Заметим, что сигнал![]() можно рассматривать как выход некоторого
идеального импульсного элемента (ИИЭ),
генерирующего с периодом
можно рассматривать как выход некоторого
идеального импульсного элемента (ИИЭ),
генерирующего с периодом![]()
![]() –импульсы,
взвешенные значениями
–импульсы,
взвешенные значениями![]() ,
а приведённую непрерывную часть – как
последовательное соединение формирователя
прямоугольных импульсов (экстраполятора
нулевого порядка) и непрерывной системы.
При этом очевидно, что
,
а приведённую непрерывную часть – как
последовательное соединение формирователя
прямоугольных импульсов (экстраполятора
нулевого порядка) и непрерывной системы.
При этом очевидно, что
![]() , (3.5.20)
, (3.5.20)
где
![]() - обозначает передаточную функцию
экстраполятора.
- обозначает передаточную функцию
экстраполятора.
Перейдем в (3.5.19) к частотным передаточным
функциям. Заменяя
![]() получим
получим
![]() , (3.5.21)
, (3.5.21)
где
![]() - частота квантования.
- частота квантования.
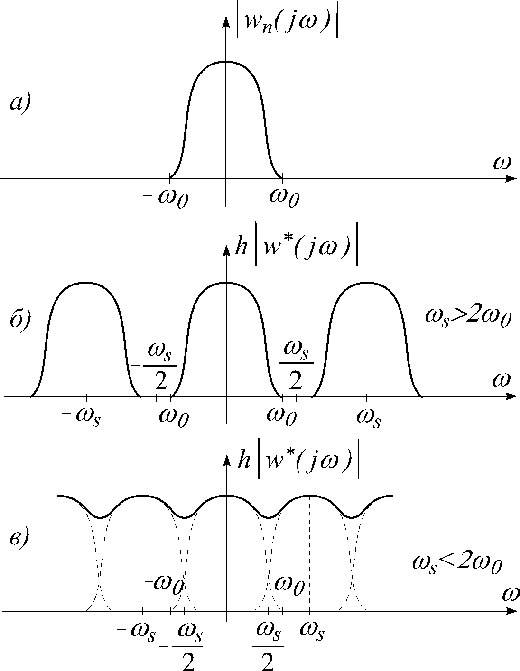
Предположим, что с достаточной для
практики точностью можно считать, что
частотная характеристика приведенной
непрерывной части обращается в ноль
начиная с некоторой частоты
![]() (рис.3.13,
а), то есть
(рис.3.13,
а), то есть
![]() ,
при
,
при![]() .
.
Тогда, если частоту квантования
![]() выбрать из условия
выбрать из условия![]() ,
то как следует из (3.5.21), частотные
характеристики дискретной системы
совпадают в основной полосе частот
,
то как следует из (3.5.21), частотные
характеристики дискретной системы
совпадают в основной полосе частот![]() с частотными характеристиками приведенной
непрерывной части с точностью до
постоянного множителя
с частотными характеристиками приведенной
непрерывной части с точностью до
постоянного множителя![]() (рис.3.13, б). Если же
(рис.3.13, б). Если же![]() ,
то частотные характеристики могут
существенно отличаться (рис.3.13, в).
,
то частотные характеристики могут
существенно отличаться (рис.3.13, в).
Рис. 3.13.
![]() экстраполятора. Как уже отмечалось
ранее, эквивалентное представление
непрерывно-дискретной системы (рис.3.12)
предполагает, что на входе экстраполятора
действует вспомогательная функция
экстраполятора. Как уже отмечалось
ранее, эквивалентное представление
непрерывно-дискретной системы (рис.3.12)
предполагает, что на входе экстраполятора
действует вспомогательная функция![]() ,
состоящая из последовательности
,
состоящая из последовательности![]() -импульсов,
взвешенных значениями
-импульсов,
взвешенных значениями![]() ,
то есть
,
то есть
![]() .
.
На выходе экстраполятора формируется
последовательность прямоугольных
импульсов с амплитудой
![]() и длительностью
и длительностью![]() .
Таким образом для выходного сигнала
экстраполятора можно записать
.
Таким образом для выходного сигнала
экстраполятора можно записать
![]()
![]() ,
,
где
![]() - единичная ступенчатая функция.
- единичная ступенчатая функция.
Определяя преобразования по Лапласу
для сигналов
![]() и
и![]() ,
будем иметь
,
будем иметь

Взяв отношение этих изображений, окончательно получим
![]() . (3.5.22)
. (3.5.22)
Для оценки частотных свойств экстраполятора
перейдем к частотной передаточной
функции. Подставляя в (3.5.22)
![]() и применяя формулу Эйлера запишем
и применяя формулу Эйлера запишем

Если учесть, что
![]() ,
то последнее выражение можно преобразовать
к виду
,
то последнее выражение можно преобразовать
к виду
 .
.
Модуль и аргумент этой комплексной функции определяется следующим образом
 (3.5.23)
(3.5.23)
где
![]() - целая часть отношения частот.
- целая часть отношения частот.
Графики функций (3.5.23) представлены на
рис.3.14. Из этих графиков в частности
следует, что на частотах
![]() экстраполятор почти не вносит искажений
сигнала, и следовательно для этой полосы
частот, с учетом (3.5.20),
приближенно можно считать,
что
экстраполятор почти не вносит искажений
сигнала, и следовательно для этой полосы
частот, с учетом (3.5.20),
приближенно можно считать,
что
![]() ,
то есть
,
то есть
при
![]() частотные характеристики непрерывной
системы и приведенной непрерывной части
практически будут отличаться лишь
постоянным коэффициентом близким к
частотные характеристики непрерывной
системы и приведенной непрерывной части
практически будут отличаться лишь
постоянным коэффициентом близким к![]() .
Но тогда из (3.5.21) следует, что если частота
квантования выбрана из условия
.
Но тогда из (3.5.21) следует, что если частота
квантования выбрана из условия![]() ,
то в основной полосе частот
,
то в основной полосе частот![]() можно приближенно принять
можно приближенно принять![]() ,
то есть частотные свойства непрерывной
системы и ее дискретного эквивалента
практически совпадают.
,
то есть частотные свойства непрерывной
системы и ее дискретного эквивалента
практически совпадают.
Рис. 3.14.

![]() экстраполятор нулевого порядка может
вносить существенные искажения. В
частности, при
экстраполятор нулевого порядка может
вносить существенные искажения. В
частности, при![]()
![]() происходит полная потеря информации,
так как коэффициент передачи экстраполятора
на этих частотах обращается в ноль. Это
явление потери информации на отдельных
частотах известно как эффект поглощения
частоты при квантовании[7].
происходит полная потеря информации,
так как коэффициент передачи экстраполятора
на этих частотах обращается в ноль. Это
явление потери информации на отдельных
частотах известно как эффект поглощения
частоты при квантовании[7].
Пример.В качестве примера рассмотрим непрерывную систему описываемую уравнением (3.3.18) (см. пример из раздела 3.3). Передаточная функция этой системы имеет вид
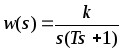 , (3.5.24)
, (3.5.24)
а
![]() -передаточная
функция эквивалентной дискретной
системы (при использовании экстраполятора
нулевого порядка) определяется выражениями
(3.3.20), (3.3.21).
-передаточная
функция эквивалентной дискретной
системы (при использовании экстраполятора
нулевого порядка) определяется выражениями
(3.3.20), (3.3.21).
Рассмотрим для простоты случай, когда
запаздывание по управлению отсутствует
![]() .
Тогда полагая в (3.3.21)
.
Тогда полагая в (3.3.21)
![]() ,
получим
,
получим
![]() ,
,![]() .
.
Применим для определенности следующие
числовые параметры:
![]() ,
,![]() ,
,![]() .
Тогда
.
Тогда![]() -передаточная
функция определится выражением
-передаточная
функция определится выражением
![]() . (3.5.25)
. (3.5.25)
Определим амплитудную и фазовую
псевдочастотные характеристики данной
дискретной системы. Для этого в (3.5.25)
перейдем к
![]() -преобразованию
с помощью подстановки
-преобразованию
с помощью подстановки![]() .
Будем иметь
.
Будем иметь
Для перехода к частотным характеристикам
с использованием абсолютной псевдочастоты
произведем замену
![]() .
Тогда последнее выражение преобразуется
к виду
.
Тогда последнее выражение преобразуется
к виду
![]() . (3.5.26)
. (3.5.26)
Обратим внимание, что статический коэффициент передачи точно, а постоянная времени инерционного звена приближенно совпадают с соответствующими параметрами исходной непрерывной системы, но по сравнению с (3.5.24) передаточная функция (3.5.26) имеет дополнительные две скобки в числителе.
Подставляя в (3.5.26)
![]() перейдем к псевдочастотной передаточной
функции
перейдем к псевдочастотной передаточной
функции
![]() ,
,
которая в комплексной плоскости будет представлять годограф псевдочастотной АФЧХ. При этом искомые псевдочастотные АЧХ и ФЧХ будут иметь вид
![]()
![]() .
.
Соответствующие логарифмические
характеристики
![]() и
и![]() представлены на рис.3.15. На этом же графике
(пунктиром) изображены логарифмические
характеристики
представлены на рис.3.15. На этом же графике
(пунктиром) изображены логарифмические
характеристики![]() и
и![]() непрерывной системы, построенные по
передаточной функции (3.5.24) с учетом
выбранных числовых параметров.
непрерывной системы, построенные по
передаточной функции (3.5.24) с учетом
выбранных числовых параметров.
Из приведенных графиков, в частности,
видно, что в области низких частот, где
![]()
![]() частотные характеристики исходной
непрерывной системы и соответствующей
ей дискретной системы близки, причем
амплитудные логарифмические характеристики
практически совпадают. Читателю
предлагается самостоятельно построить
и сравнить (в основной полосе частот)
частотные характеристики
частотные характеристики исходной
непрерывной системы и соответствующей
ей дискретной системы близки, причем
амплитудные логарифмические характеристики
практически совпадают. Читателю
предлагается самостоятельно построить
и сравнить (в основной полосе частот)
частотные характеристики![]() и
и![]() исходной непрерывной системы и
характеристики
исходной непрерывной системы и
характеристики![]() и
и![]() дискретной системы, определяемые по
частотной передаточной функции
дискретной системы, определяемые по
частотной передаточной функции![]() .
.
Рис. 3.15.
