

3.2 Расчет основных видов инструментальных погрешностей
3.2.1. Расчет производственно-технологических погрешностей
При расчете статических характеристик конкретных приборов было установлено, что величина выходного сигнала зависит не только от измеряемой величины х, но и от целого ряда параметров:
у=ƒ(х, q1, q2, . . qп), (1.15)
где q1, q2, . . qп – параметры схемы и конструкции, влияющие на выходной сигнал
К параметрам q1, q2, . . qп относят геометрические размеры деталей и величины, характеризующие физические свойства материалов (модуль упругости, удельное электрическое сопротивление, магнитную проницаемость и др.).
Если параметры q1, q2, . . qп постоянны, то уравнение (1.15), будет однозначно устанавливать зависимость у от х.
При отклонении этих параметров от начальных значений выходной сигнал у при постоянном х получит некоторое приращение:
∆y = ƒ(x, q1 + ∆q1, q2 + ∆q2 … qn + ∆qn) – ƒ(x, q1 , q2 … qn).
Поскольку первичные ошибки ∆q1, ∆q2 , … ∆q2 практически малы по сравнению с параметрами q1, q2, . . qп, то в соответствии с теорией точности механизмов зависимость между приращением сигнала ∆у и первичными ошибками можно приближенно представить в виде полного дифференциала функции (4.4):
∆y
=
![]()
 ,
,
Нулевой индекс у частных производных означает, что они вычисляются для начальных (расчетных) значений q1, q2, . . qп
множитель
![]() представляет
собой коэффициент влияния первичной
ошибки ∆q1
на
ошибку выходного сигнала прибора
(датчика).
представляет
собой коэффициент влияния первичной
ошибки ∆q1
на
ошибку выходного сигнала прибора
(датчика).


 астный
случай.Характеристики
многих измерительных систем приводятся
к виду
астный
случай.Характеристики
многих измерительных систем приводятся
к виду
где ki – показатели степени (постоянные числа, положительные или отрицательные, целые или дробные).

Дифференциал г при; x = соnst;

откуда

Следовательно, для приборов и датчиков со статической характеристикой вида (…..) относительная погрешность выходного сигнала равна сумме произведений относительных погрешностей параметров на показатели степени этих параметров.
![]() П
П олученные
формулы применимы как к приборам и
датчикам вцелом,
так и к отдельным их элементам. Например,
характеристика
спиральной пружины (см.
табл. 2.2 Л.5)
приводится
к
виду (…..):
олученные
формулы применимы как к приборам и
датчикам вцелом,
так и к отдельным их элементам. Например,
характеристика
спиральной пружины (см.
табл. 2.2 Л.5)
приводится
к
виду (…..):

Относительная погрешность пружины, вызванная отклонением параметров l, b, h и Е от расчетных значений, согласно (…..) будет
3.2.2 Температурные погрешности
Выражение (…..) можно использовать для расчета температурных погрешностей, если считать, что приращения ∆qi параметров qi произошли в результате изменения температуры окружающей среды.
Полагая параметры qi, линейно зависящими от температуры:
![]()
где αi – температурный коэффициент параметра;
qi0 – значение параметра qi при нормальной температуре, получим приращения этих параметров в виде
![]()
Откуда условие температурной компенсации будет
откуда общий температурный коэффициент всего устройства
и условие температурной компенсации

Пример.
Рассматривая электрическую цепь термоэлектрического термометра (см. рис.1.4) как четырехполюсник, преобразующий электродвижущую силу е в силу тока i, получим статическую характеристику этого звена в виде
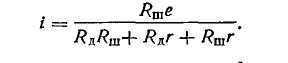
Требуется определить условие температурной компенсации, если известно, что температурные коэффициенты рамки r, шунта Rш и добавочного сопротивления RД соответственно равны αr = 0,004, αш = 0,006 и αд = 0.
Решение

Определяем частные производные дифференцированием выражения (…..):
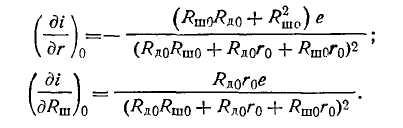
Производную …. Можно не определять, так как температурный коэффициент αд = 0.
Подставляя (…..) в (…..), получим

откуда условие температурной компенсации
![]()
или с учетом заданных значений αш и αr

Примечание. Расчет датчиков авионики производить, используя указанную ниже литературу
Вопросы контроля:
Что указывается в техническом задании на проектирование?
На какие этапы разделяется процесс проектирования ИУ?
С какой целью изучаются материалы по теме проектирования?
Что включает собой разработка схемы ИУ?
Порядок конструирования ИУ?
По каким критериям делается выбор физического принципа измерения параметра и выбор чувствительного элемента?
По каким критериям сравнивают чувствительные элементы?
Режимы работы приборов и датчиков?
Методы расчета статических характеристик?
Порядок проведения расчета статических характеристик ИУ?
Виды соединений звеньев в структурных схемах ИУ?
Основные виды типовых воздействий динамических испытаний моделей ИУ?
Порядок определения передаточной функции с помощью структурной схемы?
Литература:
Андреева Л.Е., Упругие элементы приборов, Машингиз, 1962
Асс Б.А., Жуков Н.М., Антипов Е.Ф., Детали и узлы авиационных приборов и их расчет., из-во Машиностроение, 1966
Боднер В.А., Авиационные приборы, из-во Машиностроение, 1969
Браславский Д.А., Методика расчета измерительных приборов, Справочник “Приборостроение и средства автоматики”, из-во Машиностроение, 1964
Браславский Д.А., Приборы и датчики летательных аппаратов, из-во Машиностроение, М.,1976.
1Далее подразумевать – приборов и датчиков
1В название измерительного устройства часто вводят признак, характеризующий физический принцип работы чувствительного элемента, например: “термоэлектрический термометр”,“пьезоэлектрический манометр” и т.п.
1В дальнейшем в этой главе статические характеристики будем для краткости называть просто характеристиками
1Аддитивные и мультипликативные погрешности рассматриваются здесь применительно к ИУ, имеющим линейную характеристику, но они имеют место и в приборах и датчиках с нелинейными функциями преобразования.