

Параллельное соединение звеньев (см. Рис. 2.1. Б)
Е
(1.3) сли
характеристики параллельных звеньев
1, 2,..., п
выражены
соответственно
уравнениями
сли
характеристики параллельных звеньев
1, 2,..., п
выражены
соответственно
уравнениями
а
(1.31)
y = y1 +y2 + … +yn,
то статическая характеристика системы получается подстановкой уравнений (1.3) в уравнение связи (1.31):
y = ƒ1 (x) + ƒ2 (x) +… + ƒn (x) (1.4)
Для определения чувствительности дифференцируем уравнение (1.4) по входной величине х:
S
=
![]() +
+![]() + …+
+ …+![]()
Имея в виду, что
![]() = S1
,
= S1
,
![]() = S2
,
…
= S2
,
…
![]() = Sп
,
= Sп
,
получим
S
= S1 +
S2
+ … + Sn
=
![]() Si
(1.5)
Si
(1.5)
Графический метод построения статической характеристики прибора (датчика), состоящего из трех параллельных звеньев, показан на рис. 2.1, б. Этот способ применим при любом числе параллельных звеньев.
В прямоугольной системе координат строят характеристики каждого из звеньев (кривые І, ІІ и ІІІ). Затем ось абсцисс делят на произвольные участки 1, 2, 3, 4 и т.д.
Через точку 1 проводят прямую, параллельную оси ординат. Точки 5, 6 и 7 пересечения прямой с кривыми І, ІІ и ІІІ имеют ординаты y1, y2 и y3 . затем на той же прямой отмечают толчку 8 с ординатой y4 = y1 + y2 + y3.
Повторяя аналогичное построение для точек 2, 3, и 4, получают точки 9, 10, 11. Плавная кривая IV, проведенная через точки 8, 9, 10, 11, дает искомую характеристику системы с параллельными звеньями.
Р ис.
2.3. Построение характеристик параллельного
и встречно-параллельного
ис.
2.3. Построение характеристик параллельного
и встречно-параллельного
Соединений звеньев:
а – для параллельного соединения; б – для встречно-параллельного соединения с отрицательной обратной связью
При решении задачи синтеза ищется требуемая характеристика одного из звеньев, например, характеристика III, обеспечивающая получение заданной характеристики IV системы, при условии, что кривые I и II заданы. В этом случае вначале строят заданные кривые І, ІІ и IV. Затем графически суммируют ординаты y1 + y2, а полученный результат вычитают из ординат кривой IV, что и дает ординаты искомой характеристики ІІІ:
y3 = y4 – ( y1 + y2).
Встречно-параллельное соединение (рис. 2.1, в)
Если характеристики звеньев 1 и 2 и уравнение связи имеют вид
y = ƒ1 (x1);
x2 = ƒ2 (y); (1.6)
x1 = x ±x2;
то характеристика устройства, состоящего из двух встречно-параллельных звеньев, получается из уравнений (1.6) в неявном виде:
y = ƒ1 [x ± ƒ2 (y)]. (1.7)
Здесь знак «плюс» отвечает положительной обратной связи, знак «минус» – отрицательной. Чувствительность устройства
S =
![]() .
.
Преобразуем эту производную следующим образом:
S =
![]() =
=![]()
![]() =
=![]()
![]() (x
± x2)
=
(x
± x2)
=
![]()
![]() = S1(1±S2
S),
= S1(1±S2
S),
откуда
S
(1.8)![]()
В формуле (1.8) знак «плюс» соответствует отрицательной обратной связи, знак «минус» – положительной. Графическое построение статической характеристики устройства, состоящего из двух встречно-параллельных звеньев с отрицательной обратной связью, показано на рис. 1.3, б.
В прямоугольной системе координат строят характеристику звена 1, откладывая х по оси абсцисс, у по оси ординат (кривая І рис. 2.3, б). В той же системе координат строят характеристику ІІ звена 2. Затем ось ординат делят на произвольные участки 1, 2, 3 и 4. Через точку 1 проводят прямую, параллельную оси абсцисс; точки 5 и 6 пересечения этой прямой с кривыми І и II имеют абсциссы х1 и х2.. На той же прямой находят точку 7 с абсциссой x3 = x1 + x2.. Повторяя аналогичное построение для то-чек.2, 3, 4, получаем точки 8, 9, 10. Плавная кривая, проведенная через точки 7, 8, 9, 10, дает характеристику замкнутой системы с отрицательной обратной связью (кривая ІІІ). Тангенс угла наклона касательной к кривой І в любой ее точке равен чувствительности звена І с учетом масштабов графика.
В случае компенсационного метода измерения S1 = ∞ и кривая I превращается в прямую, совпадающую с осью ординат и описываемую уравнением x1 = 0. В этом случае х = x1 и характеристика компенсационного устройства совпадает с характеристикой звена 2.
При положительной обратной связи для построения результирующей кривой ІІІ откладывают разность x3 = x1 – x2.
Для решения задачи синтеза, если задан характеристика звена 1 (кривая І) и желаемая характеристика системы (кривая ІІІ), определяют абсциссы требуемой характеристики звена 2 (кривой ІІ) путем вычитания х2 = х3 – х1 при отрицательной обратной связи или х2 = х1 – х3 при положительной обратной святи.
Пример
Т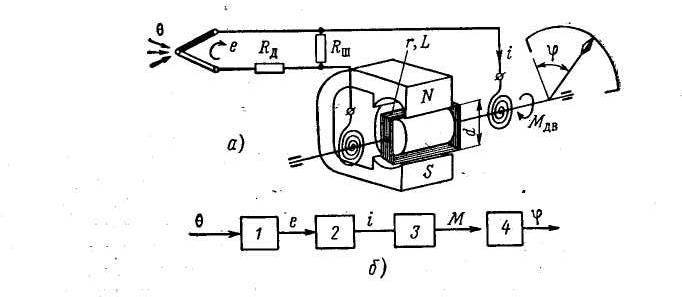 ермоэлектрический
термометр(рис.
1.4, а)
имеет последовательную структурную
схему (см.
рис.1.4, б)
с
числом звеньев n
=
4:
звено 1
– термопара, преобразующая
измеряемую температуру Ө
в электродвижущую силу е;
звено
2
– электрическая цепь, преобразующая е
в
силу тока i;
звено 3
–
магнитоэлектрический
преобразователь, преобразующий i
в
момент М;
звено
4
– упругая
подвижная
система, преобразующая М
в
угловое перемещение φ,
которое
и
является
выходным сигналом.
ермоэлектрический
термометр(рис.
1.4, а)
имеет последовательную структурную
схему (см.
рис.1.4, б)
с
числом звеньев n
=
4:
звено 1
– термопара, преобразующая
измеряемую температуру Ө
в электродвижущую силу е;
звено
2
– электрическая цепь, преобразующая е
в
силу тока i;
звено 3
–
магнитоэлектрический
преобразователь, преобразующий i
в
момент М;
звено
4
– упругая
подвижная
система, преобразующая М
в
угловое перемещение φ,
которое
и
является
выходным сигналом.
Требуется определить характеристику прибора (уравнение шкалы) и его чувствительность.
Рис. 1.4. Термоэлектрический термометр:
а – принципиальная схема; б – структурная схема; 1 – термопара; 2 – электрическая цепь; 3 - магнитоэлектрический преобразователь; 4 – упругая подвижная система
Решение.
1. Определим характеристики звеньев структурной схемы:
а) характеристика звена 1 определяется по справочным данным; табличную зависимость можно аппроксимировать аналитической функцией
е = а1 Ө + а2 Ө2,
где а1 и а2 – постоянные коэффициенты, зависящие от материалов термоэлектродов;
б) характеристика звена 2, определяемая известными методами расчета электрических цепей, будет
i
=
![]() e,
e,
где RШ,, RД и r – электрическое сопротивление шунта, добавочное сопротивление и сопротивление рамки гальванометра;
в) характеристика звена 3, определяемая на основании законов электродинамики, имеет вид
М = B F w i,
где В – магнитная индукция в рабочем зазоре магнитопровода;
F и w – активная площадь и число витков рамки гальванометра;
г) характеристики звена 4 определяются уравнением противодействующих пружин:

коэффициент угловой жесткости одной спиральной пружины;
b ,
hи
l
–
ширина и толщина сечения, и развернутая
длина пружины;
,
hи
l
–
ширина и толщина сечения, и развернутая
длина пружины;
Е – модуль упругости материала пружины.
2
(1.9)
 .
В соответствии с формулой(1.2.)
определим характеристику
прибора совместным решением уравнений
звеньев:
.
В соответствии с формулой(1.2.)
определим характеристику
прибора совместным решением уравнений
звеньев:
3. Определим чувствительность звеньев 1, 2, 3, 4 путем дифференцирования их уравнений:

4. По формуле 1.21 определим чувствительность прибора:.


Тот же результат получается, если определить чувствительность путем непосредственного дифференцирования выражения (1.9)