5. Смстеми відліку. Простір і час…
Під рухом мат. точки у просторі розуміють зміну її положення відносно деяких тіл на протязі певного часу. В зв’язку з цим вводять сист. відліку. Сист. відліку –це тіло або сукупність нерухомих одне відносно одного тіл відліку та набір метрик, які дають змогу визначити відстань, кути, моменти та інтервали часу. В ПДСК положення точки М задається радіус-вектором r і проекціями x, y, z точки на вісі. В полярній положення точки М задається радіус-вектором ρ та кутом повороту відносно вісі абсцис φ. В циліндричній СК – радіус-вектором r ,кутом повороту φ, та кутом повороту відносно вісі аплікат ϑ. Сист. відліку наз. інерціальною, якщо всі точки рівноправні, тобто діє Евклідова метрика. Для вивчння руху мат. точки необхідно визначити момент часу, в який та чи інша точка має ті чи інші координати. Потрапляння точки М в точку простору з координатами x, y, z в момент часу t наз. елементарною механічною подією. Неперерва сукупність послідовних подій скл. механічний рух. Кінематичне рівняння руху r = r (t) Довільна точка простору має три ступені вільності: x = x (t), y = y (t), z = z(t) ці рівності наз. кінематичними рівнянням руху мат. точки. В ПДСК координати x, y, z являються проекціями радіус-вектором r, проведеного в точку з початку координат r = xi+yj+zk, довжина і напрям вектора знаходяться за формулою r2=x2+y2+z2. При русі в площині часто зручно користуватися полярними координатами ρ та φ. ρ = ρ (t), φ = φ (t). Рух точки також може бути заданим траєкторією та та миттєвим положенням точки на ній.
6. Кінематика руху твердого тіла (тт.)
Під твердим тілом в механіці розуміють неперервну систему мат. т., відстані між якими залишаються незмінними. Аналітичний опис положення тт. в просторі, а також зміна цього положення з часом, тобто рух тіла, повинно визначати положення і рух будь-якої точки тт.. Одна мат. точка має три степені вільності, дві – 6, якщо накласти умови збереження відстані між точками, то координати двох точок повинні задовольняти рівність:
(![]() x2
–
x1)2+(y2
– y1)2+(z2
– z1)2
=( l
1,2)2
,
де
l
1,2
– відстаь між точками. Це р-ня дає змогу
виразити одну змінну через решту, таким
чином для визначення положення сист. з
двох точок слід знати п’ять координат
з шести. Якщо маємо сист. з трьох точок,
які не лежежать на одній прямій, то можна
записати три незалежні р-ня, які виражають
відстань між точками через їх координати
(x2
–
x1)2+(y2
– y1)2+(z2
– z1)2
=( l
1,2)2,
(x3
–
x1)2+(y3
– y1)2+(z3
– z1)2
=( l
1,3)2
, (x2
–
x3)2+(y2
– y3)2+(z2
– z3)2
=( l
2,3)2.
Якщо відстані l
1,2
, l
1,3
, l2,3
постійні,
то шість точок будуть незалежні. Додавання
четвертої точки до сист. не збільшить
степінь вільності сист., тому що її
координати повинні задовольняти три
незалежні рівні зв’язків, які визначають
відстань від четвертої точки до перших
трьох. Отже довільне тт. має 6 степенів
вільності.
x2
–
x1)2+(y2
– y1)2+(z2
– z1)2
=( l
1,2)2
,
де
l
1,2
– відстаь між точками. Це р-ня дає змогу
виразити одну змінну через решту, таким
чином для визначення положення сист. з
двох точок слід знати п’ять координат
з шести. Якщо маємо сист. з трьох точок,
які не лежежать на одній прямій, то можна
записати три незалежні р-ня, які виражають
відстань між точками через їх координати
(x2
–
x1)2+(y2
– y1)2+(z2
– z1)2
=( l
1,2)2,
(x3
–
x1)2+(y3
– y1)2+(z3
– z1)2
=( l
1,3)2
, (x2
–
x3)2+(y2
– y3)2+(z2
– z3)2
=( l
2,3)2.
Якщо відстані l
1,2
, l
1,3
, l2,3
постійні,
то шість точок будуть незалежні. Додавання
четвертої точки до сист. не збільшить
степінь вільності сист., тому що її
координати повинні задовольняти три
незалежні рівні зв’язків, які визначають
відстань від четвертої точки до перших
трьох. Отже довільне тт. має 6 степенів
вільності.
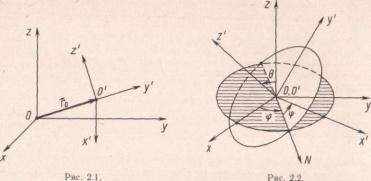
В заданій ПДСК O’ x’ y’ z’ визначають положення будь-якої точки тт. координатами x’ y’ z’ , щоб координати при русі залишались постійними. Тому для визначення положення тт. у просторі достатньо знати положення рухомої сист. координат O’ x’ y’ z’ відносно нерухомої O x y z(рис.2.1.). Щоб задати миттєве положення сист. координат O’ x’ y’ z’ , потрібно знати початок O’ та координати x0, y0, z0 и кути які утворюються між відповідними осями рухомиї та не рухомої сист. координат. Вводять 3 незалежні кути: φ – кут прецесії, він змінюється при повороті рухомої сист. навколо вісі Oz нерухомої, ψ – кут власного обертання та θ – кут нутації.