

Вопросы для самопроверки
Дайте определение статического регулирования.
Назовите особенности расчета настроек регуляторов двухконтурной системы.
Дайте определение инвариантной системы по отношению к возмущающемуся воздействию.
Дайте определение инвариантной системы по отношению к задающему воздействию.
Чем определяется комбинированное управление системы.
Назовите виды корректирующих устройств и их порядок расчета.
Задания
Задача 1. С помощью преобразования Лапласа решить дифференциальное уравнение с заданными начальными условиями таблица 1.
Таблица 1. Дифференциальные уравнения.
|
№ варианта |
|
|
|
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|
|
5 |
|
|
|
6 |
|
|
|
7 |
|
|
|
8 |
|
|
|
9 |
|
|
|
10 |
|
|
Задача 2. По известной кривой разгона и весовой функции линейного элемента (таблица 2) найти: 1) реакцию на входной сигнал x(t); 2) весовую функцию или кривую разгона соответственно; 3) передаточную функцию элемента.
Таблица 2. Задания к задаче 2.
|
№ варианта |
h(t) |
|
x(t) |
№ варианта |
h(t) |
|
x(t) |
|
1 |
|
|
|
6 |
|
|
|
|
2 |
|
|
|
7 |
|
|
|
|
3 |
|
|
|
8 |
|
|
|
|
4 |
|
|
|
9 |
|
|
|
|
5 |
|
|
|
10 |
|
|
|
Задача 3. По известной передаточной функции элемента W(s) найти его кривую разгона, весовую функцию, амплитудно-частотную, фазо-частотную, амлитудно-фазовую характеристики. Построить графики. Записать дифференциальное уравнение элемента, связывающее входную и выходную величины (таблица 3).
Таблица 3. Задания к задаче 3.
|
№ варианта |
Передаточная функция W(s) |
№ варианта |
Передаточная функция W(s) |
|
1 |
|
6 |
|
|
2 |
|
7 |
|
|
3 |
|
8 |
|
|
4 |
|
9 |
|
|
5 |
|
10 |
|
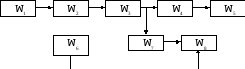
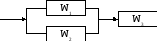
Задача 4. Вывести передаточную функцию для заданной структурной схемы системы (таблица 4).
Таблица 4. Структурные схемы.
|
№ варианта |
Структурная схема |
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
|
5 |
|
|
6 |
|
|
7 |
|





Окончание таблицы 4
|
8
|
|
|
9
|
|
|
10
|
|

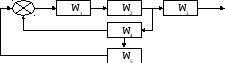
Задача 5. Исследовать на устойчивость систему автоматического управления, схема которой приведена на рис. 1, учитывая данные, приведенные в таблице 5:
с помощью критерия устойчивости Гурвица;
с помощью графического критерия устойчивости Михайлова.
 х
у
х
у
у
Рис. 1. Структурная схема системы
Таблица 5. Задания для задачи 5
|
№ варианта |
Wp(s) |
Wоб(s) |
№ варианта |
Wp(s) |
Wоб(s) |
|
1 |
|
|
6 |
3 |
|
|
2 |
|
|
7 |
|
|
Окончание таблицы 5
|
3 |
|
|
8 |
|
|
|
4 |
|
|
9 |
|
|
|
5 |
|
|
10 |
|
|
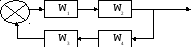
Задача 6. Исследовать устойчивость системы автоматического регулирования с помощью критерия устойчивости Найквиста. Схема системы приведена на рисунке 2, данные для расчета в таблице 6.
Рис. 2. Структурная
схема системы
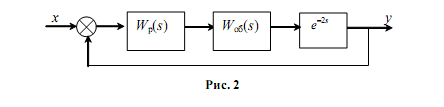
Таблица 6.
|
№ варианта |
Wp(s) |
Wоб(s) |
№ варианта |
Wp(s) |
Wоб(s) |
|
1 |
|
|
6 |
|
|
|
2 |
|
|
7 |
|
|
|
3 |
|
|
8 |
|
|
|
4 |
|
|
9 |
|
|
|
5 |
|
|
10 |
|
|